TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060225
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170820
出願日
2023-09-29
発明の名称
制御システム、鞍乗型車両、制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
B62K
25/04 20060101AFI20250403BHJP(鉄道以外の路面車両)
要約
【課題】所定の動作状態における鞍乗型車両の車体安定性の点で有利な技術を提供する。
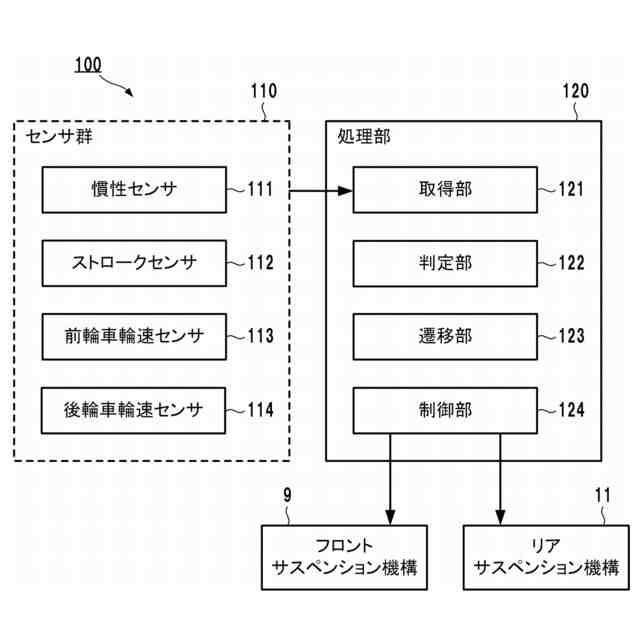
【解決手段】フロントサスペンション機構とリアサスペンション機構とを有する鞍乗型車両の制御システムは、前記フロントサスペンション機構のストローク速度を検知する検知手段と、前記リアサスペンション機構の減衰力を制御する制御手段と、前記鞍乗型車両の動作状態を判定する判定手段と、前記判定手段により前記鞍乗型車両が所定の動作状態であると判定された場合、前記制御手段による前記リアサスペンション機構の制御モードを、前記検知手段の検知結果に応じて前記リアサスペンション機構の減衰力を変化させる第1モードから、前記リアサスペンション機構の減衰力を固定する第2モードに遷移させる遷移手段と、を備え、前記遷移手段は、前記所定の動作状態の種類に応じて、前記第1モードから前記第2モードへの前記制御モードの遷移に費やす遷移時間を変更する。
【選択図】図2
特許請求の範囲
【請求項1】
フロントサスペンション機構とリアサスペンション機構とを有する鞍乗型車両の制御システムであって、
前記フロントサスペンション機構のストローク速度を検知する検知手段と、
前記リアサスペンション機構の減衰力を制御する制御手段と、
前記鞍乗型車両の動作状態を判定する判定手段と、
前記判定手段により前記鞍乗型車両が所定の動作状態であると判定された場合、前記制御手段による前記リアサスペンション機構の制御モードを、前記検知手段の検知結果に応じて前記リアサスペンション機構の減衰力を変化させる第1モードから、前記リアサスペンション機構の減衰力を固定する第2モードに遷移させる遷移手段と、
を備え、
前記遷移手段は、前記所定の動作状態の種類に応じて、前記第1モードから前記第2モードへの前記制御モードの遷移に費やす遷移時間を変更する、ことを特徴とする制御システム。
続きを表示(約 1,600 文字)
【請求項2】
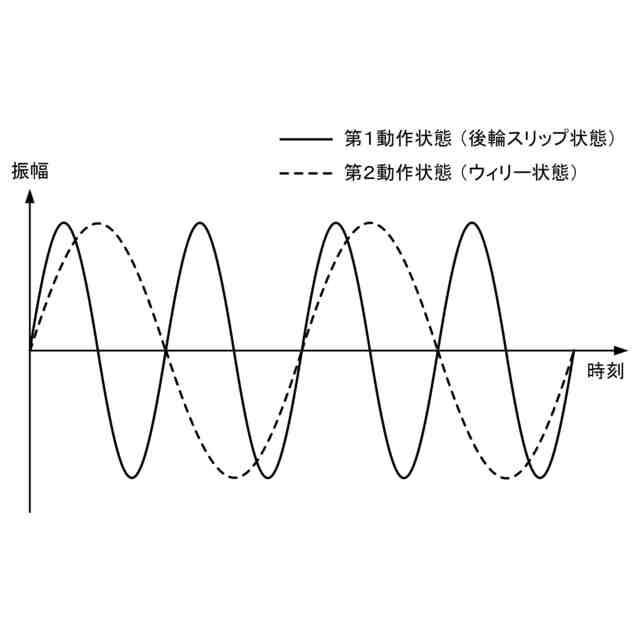
前記鞍乗型車両のうち前記フロントサスペンション機構および前記リアサスペンション機構より下側をバネ下部分とし、上側をバネ上部分としたとき、前記所定の動作状態の種類は、前記バネ下部分の方が前記バネ上部分よりも振動が大きくなる第1動作状態と、前記バネ上部分の方が前記バネ下部分よりも振動が大きくなる第2動作状態とを含み、
前記遷移手段は、前記第1動作状態の方が前記第2動作状態よりも前記遷移時間が短くなるように、前記所定の動作状態の種類に応じて前記遷移時間を変更する、ことを特徴とする請求項1に記載の制御システム。
【請求項3】
前記第1動作状態は、前記鞍乗型車両の後輪がスリップしている後輪スリップ状態であり、
前記第2動作状態は、前記鞍乗型車両がウィリーしているウィリー状態である、ことを特徴とする請求項2に記載の制御システム。
【請求項4】
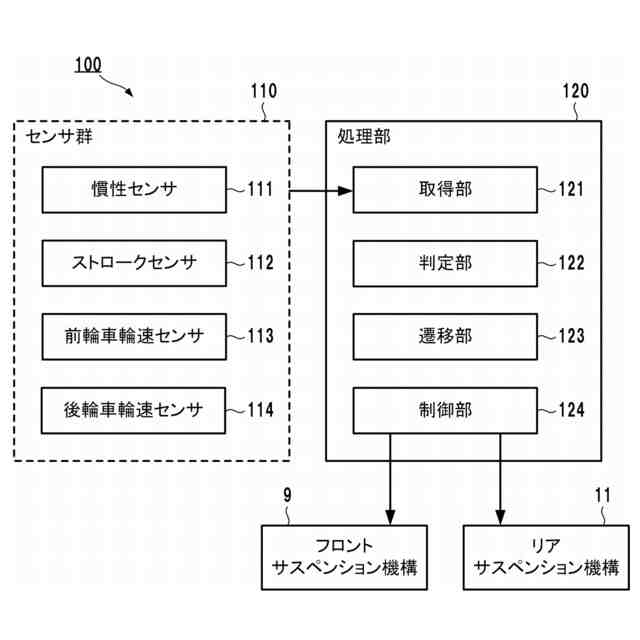
前記鞍乗型車両に設けられたセンサ群から情報を取得する取得手段を更に備え、
前記遷移手段は、前記所定の動作状態の種類ごとに、前記取得手段により取得された前記情報に基づいて前記遷移時間を変更する、ことを特徴とする請求項1に記載の制御システム。
【請求項5】
前記遷移手段は、前記取得手段により取得された前記情報に含まれる複数種類の指標値のうち、前記遷移時間を変更するために使用する指標値を、前記所定の動作状態の種類に応じて変更する、ことを特徴とする請求項4に記載の制御システム。
【請求項6】
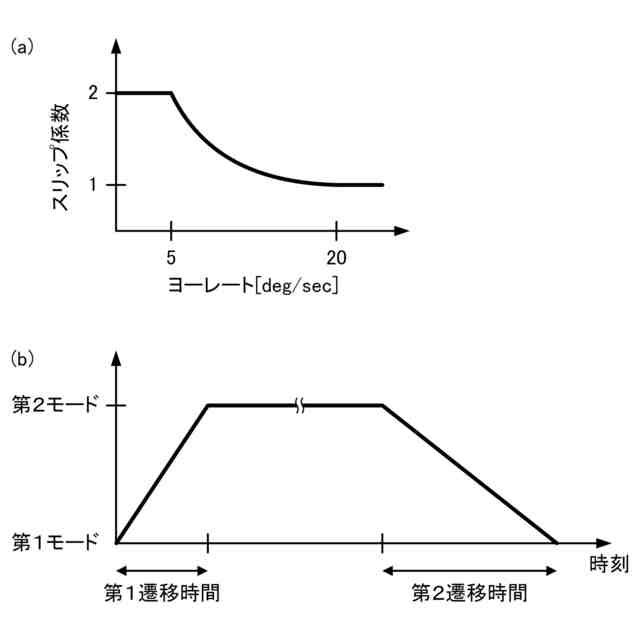
前記所定の動作状態の種類は、前記鞍乗型車両の後輪がスリップしている後輪スリップ状態を含み、
前記センサ群は、前記鞍乗型車両のヨーレートを検知する第1センサを含み、
前記遷移手段は、前記判定手段により前記後輪スリップ状態が開始されたと判定された場合、前記取得手段により前記第1センサから取得された前記ヨーレートに基づいて前記遷移時間を決定する、
ことを特徴とする請求項4に記載の制御システム。
【請求項7】
前記遷移手段は、前記判定手段により前記後輪スリップ状態が開始されたと判定された場合、前記取得手段により前記第1センサから取得された前記ヨーレートが大きいほど前記遷移時間を短くなるように前記遷移時間を決定する、ことを特徴とする請求項6に記載の制御システム。
【請求項8】
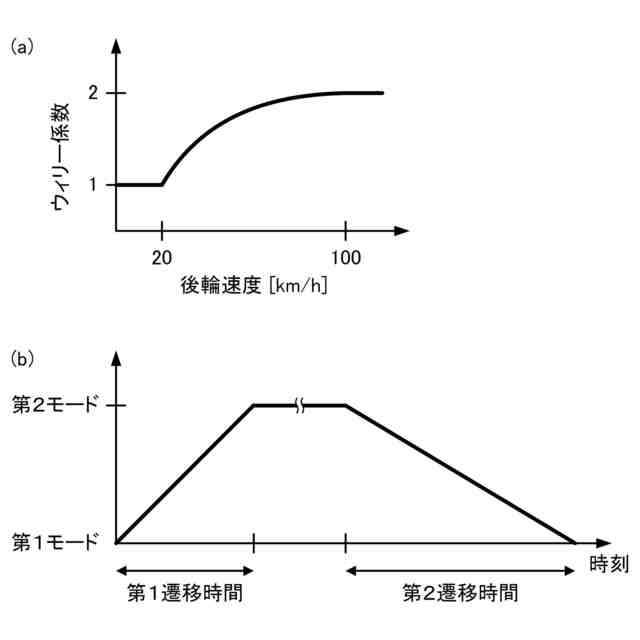
前記所定の動作状態の種類は、前記鞍乗型車両がウィリーしているウィリー状態を含み、
前記センサ群は、前記鞍乗型車両の後輪の車輪速を検知する第2センサを含み、
前記遷移手段は、前記判定手段により前記ウィリー状態が開始されたと判定された場合、前記取得手段により前記第2センサから取得された前記車輪速に基づいて前記遷移時間を決定する、ことを特徴とする請求項4に記載の制御システム。
【請求項9】
前記遷移手段は、前記判定手段により前記ウィリー状態が開始されたと判定された場合、前記取得手段により前記第2センサから取得された前記車輪速が小さいほど前記遷移時間が短くなるように前記遷移時間を決定する、ことを特徴とする請求項8に記載の制御システム。
【請求項10】
前記判定手段は、前記鞍乗型車両において前記所定の動作状態が終了したか否かを更に判定し、
前記遷移手段は、前記判定手段により前記所定の動作状態が終了したと判定された場合、前記制御モードを前記第2モードから前記第1モードに遷移させるとともに、前記所定の動作状態の種類に応じて、前記第2モードから前記第1モードへの前記制御モードの遷移に費やす第2遷移時間を変更する、ことを特徴とする請求項1に記載の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、車両がジャンプ中であると判定した場合には、車両がジャンプ中であると判定していない場合よりも、減衰装置によって車両本体と車輪との間に生じさせる減衰力を大きくすることが開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/077761号
【発明の概要】
【発明が解決しようとする課題】
【0004】
鞍乗型車両では、例えば、フロントサスペンション機構のストローク速度の検知結果に応じてリアサスペンション機構のストローク速度が推定され、その推定結果に応じて、リアサスペンション機構が制御される。しかしながら、後輪がスリップしている状態やウィリーしている状態など鞍乗型車両が所定の動作状態である場合には、フロントサスペンション機構のストローク速度の検知結果に基づいて、リアサスペンション機構に生じうるストローク速度を推定することが困難になりうる。このような場合においても、鞍乗型車両の車体安定性が確保されるようにリアサスペンション機構を適切に制御することが望まれる。
【0005】
そこで、本発明は、所定の動作状態における鞍乗型車両の車体安定性の点で有利な技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一側面としての制御システムは、フロントサスペンション機構とリアサスペンション機構とを有する鞍乗型車両の制御システムであって、前記フロントサスペンション機構のストローク速度を検知する検知手段と、前記リアサスペンション機構の減衰力を制御する制御手段と、前記鞍乗型車両の動作状態を判定する判定手段と、前記判定手段により前記鞍乗型車両が所定の動作状態であると判定された場合、前記制御手段による前記リアサスペンション機構の制御モードを、前記検知手段の検知結果に応じて前記リアサスペンション機構の減衰力を変化させる第1モードから、前記リアサスペンション機構の減衰力を固定する第2モードに遷移させる遷移手段と、を備え、前記遷移手段は、前記所定の動作状態の種類に応じて、前記第1モードから前記第2モードへの前記制御モードの遷移に費やす遷移時間を変更する、ことを特徴とする。
【発明の効果】
【0007】
本発明によれば、例えば、所定の動作状態における鞍乗型車両の車体安定性の点で有利な技術を提供することができる。
【図面の簡単な説明】
【0008】
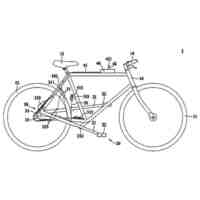
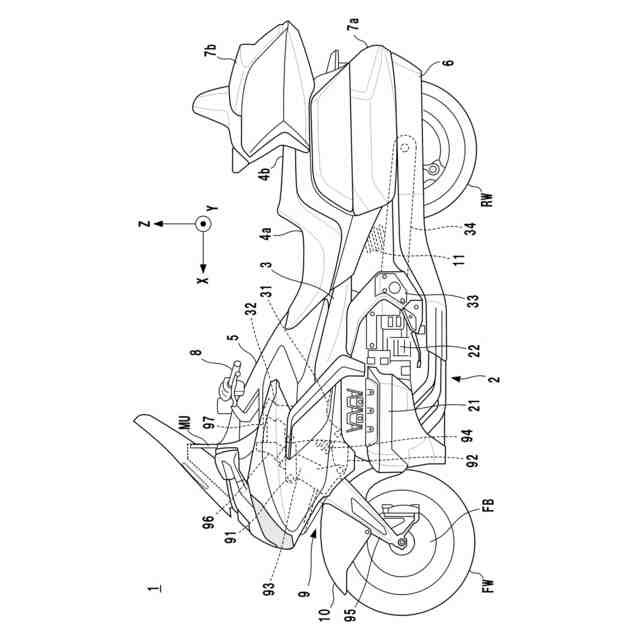
鞍乗型車両を示す左側面図
制御システムの構成例を示す図
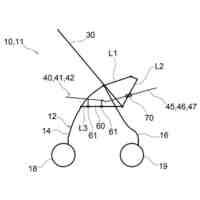
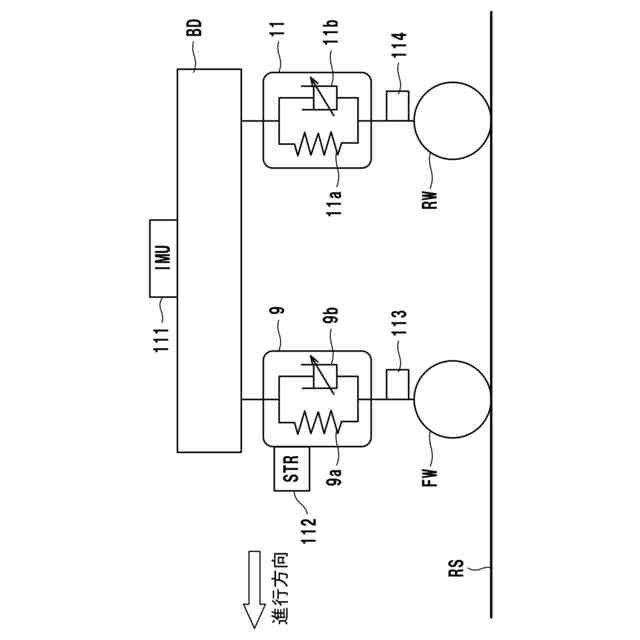
車両の構成をモデル化した図
各動作状態で車両に生じる振動の一例を示す図
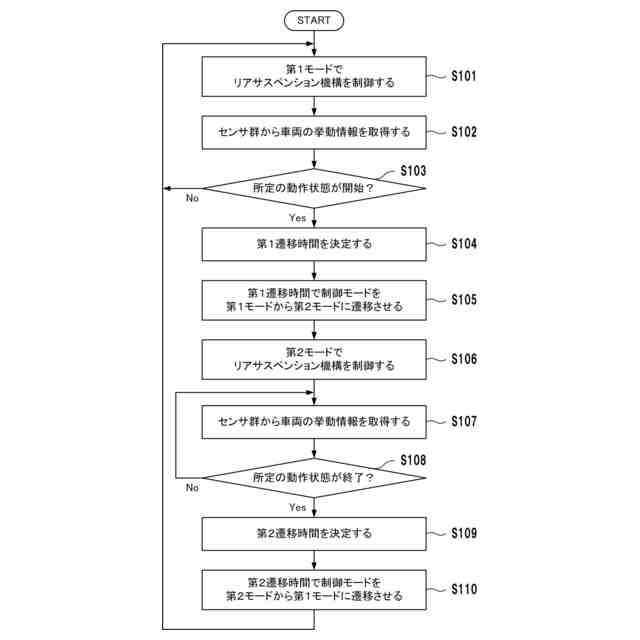
リアサスペンション機構の制御方法を示すフローチャート
後輪スリップ状態における制御モードの遷移を説明するための図
ウィリー状態における制御モードの遷移を説明するための図
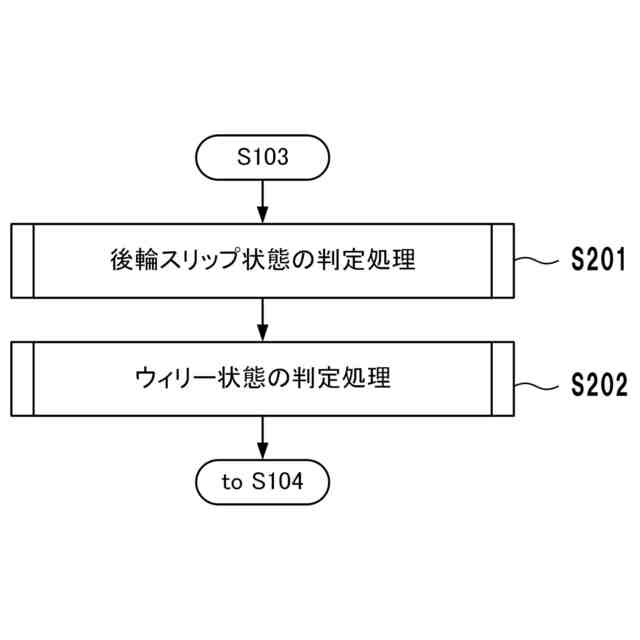
所定の動作状態の開始の判定方法を示すフローチャート
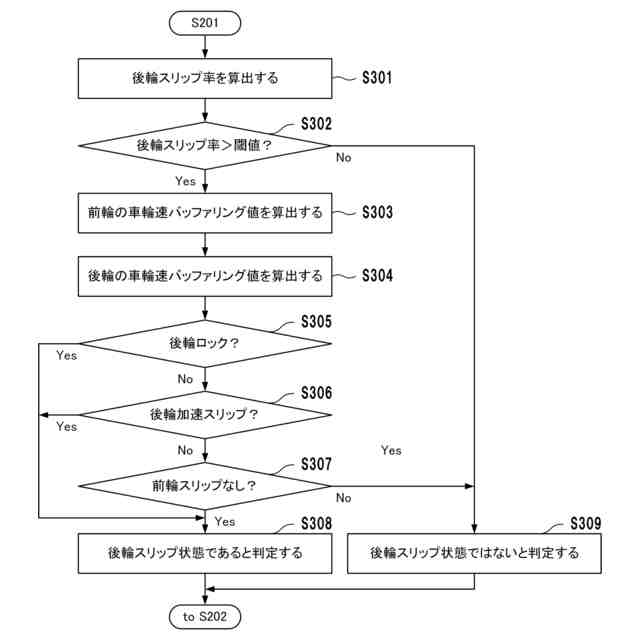
後輪スリップ状態の判定処理を示すフローチャート
ウィリー状態の判定処理を示すフローチャート
ウィリー軸加速度の算出に使用される各パラメータ値を説明するための図
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図を参照しながら説明する。本発明は、以下の実施形態に限定されるものではなく、本発明の趣旨の範囲内での構成の変更や変形も含む。また、本実施形態で説明されている特徴の組み合わせの全てが本発明に必須のものとは限らない。なお、同一の構成要素には同一の参照番号を付して、その説明を省略する。
【0010】
[鞍乗型車両の構成]
本発明に係る一実施形態について説明する。図1は、本実施形態の鞍乗型車両1を示す左側面図である。図1において、矢印X、Y、Zは互いに直交する方向を示し、X方向は鞍乗型車両1の前後方向、Y方向は鞍乗型車両1の車幅方向(左右方向)、Z方向は鞍乗型車両1の上下方向を示す。以下では、本発明に係る制御システムを、鞍乗型車両1としての自動二輪車に適用する例を説明する。但し、本発明に係る制御システムは、三輪車など他の形式の鞍乗型車両にも適用可能であり、また、内燃機関を駆動源とする車両のほか、モータを駆動源とする電動車両にも適用可能である。なお、以下では、鞍乗型車両1を車両1と表記する場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発音装置
1か月前
個人
電動モビリティ
1か月前
個人
折り畳み自転車
4か月前
個人
自転車用傘捕捉具
5か月前
個人
体重掛けリフト台車
4か月前
個人
自由方向乗車自転車
1か月前
個人
自転車用荷台
8か月前
井関農機株式会社
作業車両
10か月前
個人
キャンピングトライク
2か月前
個人
自転車用荷物台
5か月前
個人
アタッチメント
5か月前
株式会社クラベ
面状ユニット
11か月前
株式会社CPM
駐輪機
5か月前
個人
ステアリングの操向部材
8か月前
個人
ステアリングの操向部材
2か月前
個人
スライドレインプルーフ
11か月前
株式会社三五
リアサブフレーム
4か月前
帝人株式会社
車両構造体
10か月前
三甲株式会社
台車
7か月前
三甲株式会社
台車
7か月前
祖峰企画株式会社
平台車
9か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
学校法人千葉工業大学
車両
3か月前
豊田合成株式会社
操舵装置
5か月前
ダイハツ工業株式会社
車両
6か月前
個人
足踏みペダル式自転車
10か月前
学校法人千葉工業大学
車両
3か月前
豊田合成株式会社
ハンドル
11か月前
学校法人千葉工業大学
車両
3か月前
コンビ株式会社
乳母車
5日前
株式会社クボタ
作業車
9か月前
株式会社クボタ
作業車
9か月前
株式会社クボタ
作業車
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ