TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025058684
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023168774
出願日
2023-09-28
発明の名称
走行支援装置、及び鞍乗り型車両
出願人
本田技研工業株式会社
代理人
弁理士法人クシブチ国際特許事務所
主分類
G08G
1/16 20060101AFI20250402BHJP(信号)
要約
【課題】過剰な報知を抑制すること。
【解決手段】走行支援装置(10)は、自車両1の後側方に、幅方向に並ぶ複数の検出範囲要素(PA~PE)を設定する検出範囲要素設定部(22B)と、前記検出範囲要素(PA~PE)のそれぞれに対応する幅位置毎に、物体が存在するか否かを検出する物体検出部(23)と、前記物体検出部(23)の検出結果に基づき前記物体が報知対象物と判定される場合に、前記物体の存在を報知する報知部(12)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
自車両(1)の後側方に、幅方向に並ぶ複数の検出範囲要素を設定する検出範囲要素設定部(22B)と、
前記検出範囲要素のそれぞれに対応する幅位置毎に、物体が存在するか否かを検出する物体検出部(23)と、
前記物体検出部(23)の検出結果に基づき前記物体が報知対象物と判定される場合に、前記物体の存在を報知する報知部(12)と、
を備える走行支援装置。
続きを表示(約 1,200 文字)
【請求項2】
前記物体検出部(23)は、前記検出範囲要素のそれぞれに対応する幅位置毎に、物体が存在するか否かを検出し、これらの検出結果が所定条件を満たす場合に、前記物体を報知対象物と判定する
請求項1に記載の走行支援装置。
【請求項3】
前記物体検出部(23)は、前記複数の検出範囲要素のうち、最も幅方向外側の検出範囲要素に対応する幅位置に前記物体が存在する場合に、前記物体を報知対象物と判定する
請求項1又は2に記載の走行支援装置。
【請求項4】
前記物体検出部(23)は、前記複数の検出範囲要素のうち、最も幅方向外側の検出範囲要素に対応する幅位置に前記物体が存在せず、最も幅方向内側の検出範囲要素に対応する幅位置に前記物体が存在する場合に、前記物体を報知対象物ではないと判定する
請求項1又は2に記載の走行支援装置。
【請求項5】
前記検出範囲要素設定部(22B)は、前記自車両(1)の左右中央の後方に、後方検出範囲要素を設定し、
前記物体検出部(23)は、前記後方検出範囲要素に対応する幅位置に、前記物体が存在する場合に、前記物体を報知対象物ではないと判定する
請求項1又は2に記載の走行支援装置。
【請求項6】
前記検出範囲要素設定部(22B)は、前記自車両(1)の車線変更を意図する操作が行われた場合に、前記検出範囲要素を設定する
請求項1又は2に記載の走行支援装置。
【請求項7】
前記物体検出部(23)は、前記自車両(1)の車線変更を意図する操作が行われた場合に、前記検出範囲要素設定部(22B)が設定した前記検出範囲要素のそれぞれに対応する幅位置毎に、物体が存在するか否かを検出する
請求項1又は2に記載の走行支援装置。
【請求項8】
前記報知部(12)は、前記自車両(1)の車線変更を意図する操作が行われた場合に、前記物体検出部(23)の検出結果に基づき前記物体の存在を報知する
請求項1又は2に記載の走行支援装置。
【請求項9】
前記複数の検出範囲要素のうち、最も幅方向外側の検出範囲要素は、前記自車両(1)が、車線の左右中央の位置、及び、前記車線内で左右中央から左右にずれた位置を走行する場合に、前記車線の幅方向外側に隣接する他の車線内に位置し、
最も幅方向内側の検出範囲要素は、前記自車両(1)が、前記車線の左右中央の位置、及び、前記車線内で左右中央から左右にずれた位置を走行する場合に、前記車線内に位置する
請求項1又は2に記載の走行支援装置。
【請求項10】
前記自車両(1)は、鞍乗り型車両である
請求項1又は2に記載の走行支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行支援装置、及び鞍乗り型車両に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、死角になりやすい後側方に存在する他車両を検出し、自車両の運転者に注意を促す四輪車用のシステムが知られている。自動二輪車等の鞍乗り型車両においても、同様の死角監視システムが検討されている(例えば特許文献1)。特許文献1記載の技術では、自動二輪車の傾斜に基づき、隣の車線上にある車の相対的な位置を特定し、使用者の車線変更時等に、使用者の死角に車が存在することを使用者に報知する。
【先行技術文献】
【特許文献】
【0003】
特表2017-522681号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自動二輪車等の比較的小型の車両は、大型車両と比較して、同じ車線内でも幅方向に様々な走行位置を取り得る。
従来の死角監視システムでは、自動二輪車等の自車両が同じ車線内で左右一方側に寄った場合に、同じ車線内を走行する後方車両の存在を、自車両の運転者に報知し、過剰な報知を招くおそれがある。
本発明は、上述した事情に鑑みてなされたものであり、過剰な報知を抑制することを目的としている。
【課題を解決するための手段】
【0005】
自車両の後側方に、幅方向に並ぶ複数の検出範囲要素を設定する検出範囲要素設定部と、前記検出範囲要素のそれぞれに対応する幅位置毎に、物体が存在するか否かを検出する物体検出部と、前記物体検出部の検出結果に基づき前記物体が報知対象物と判定される場合に、前記物体の存在を報知する報知部と、を備える走行支援装置を提供する。
また、上記走行支援装置と、車線変更を意図する操作を受け付ける操作部とを備え、前記検出範囲要素設定部は、前記操作部が操作された場合に、前記検出範囲要素を設定する鞍乗り型車両を提供する。
【発明の効果】
【0006】
過剰な報知を抑制することができる。
【図面の簡単な説明】
【0007】
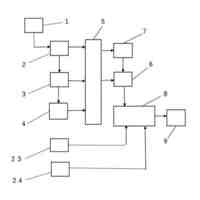
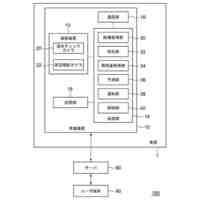
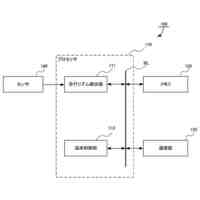
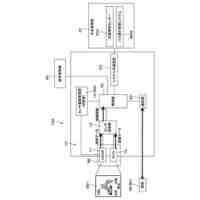
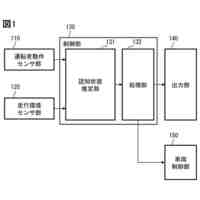
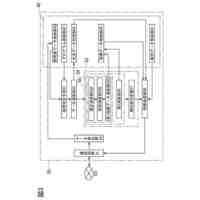
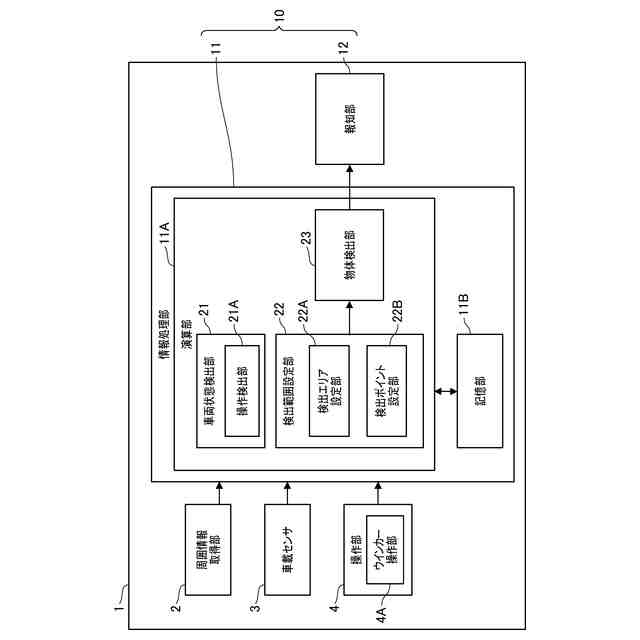
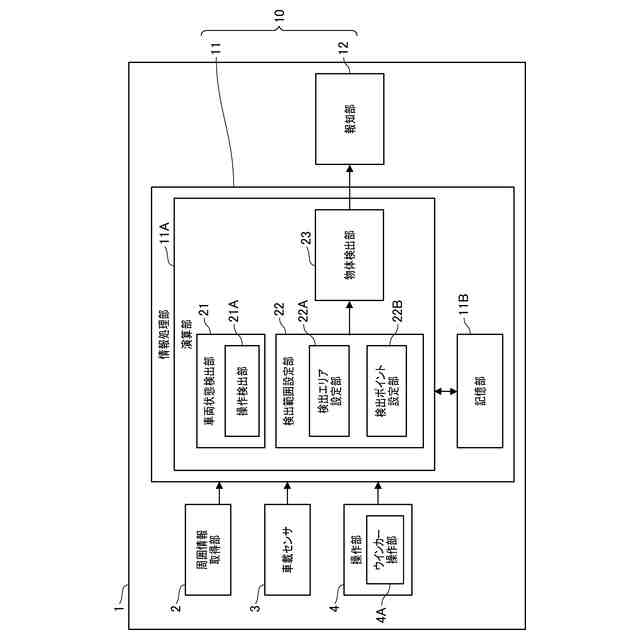
本発明の実施形態に係る走行支援装置を周辺構成と共に示すブロック図である。
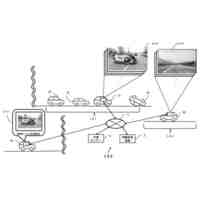
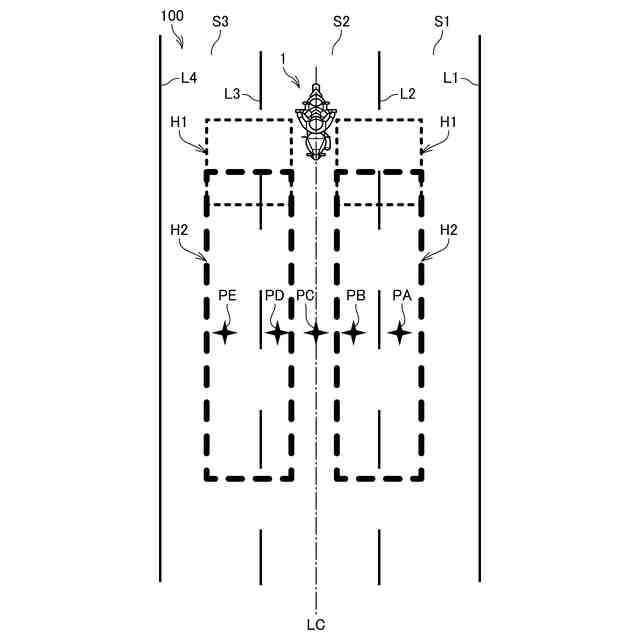
検出エリア及び検出ポイントを模式的に示す図である。
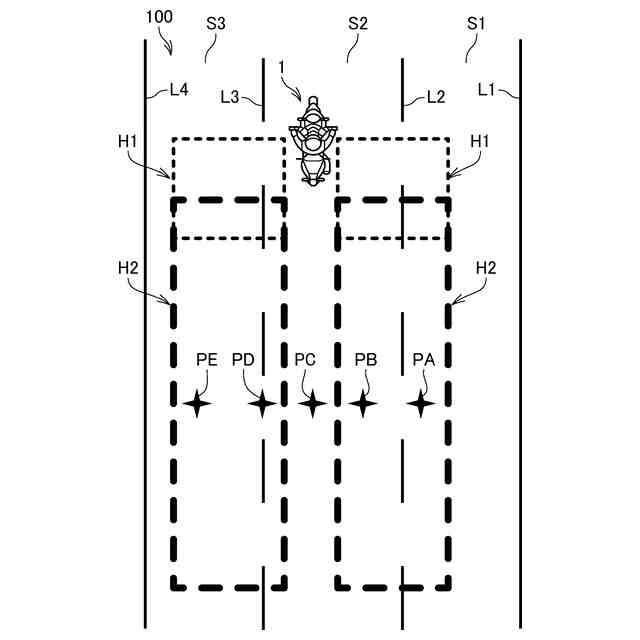
車両の走行位置が異なる場合の検出エリア及び検出ポイントを模式的に示す図である。
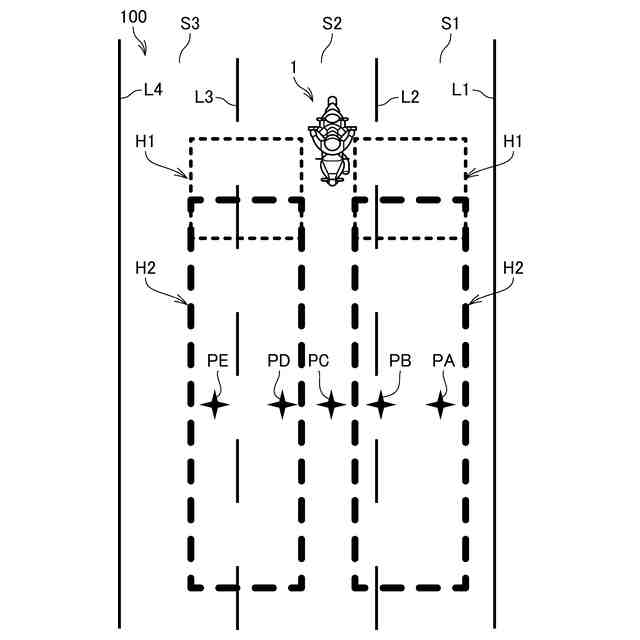
車両の走行位置が異なる場合の検出エリア及び検出ポイントを模式的に示す図である。
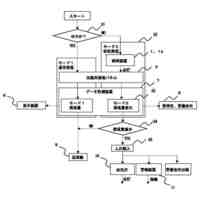
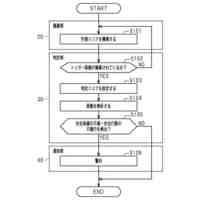
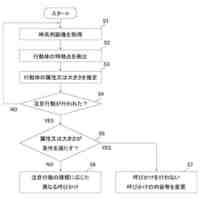
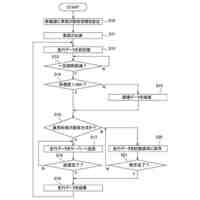
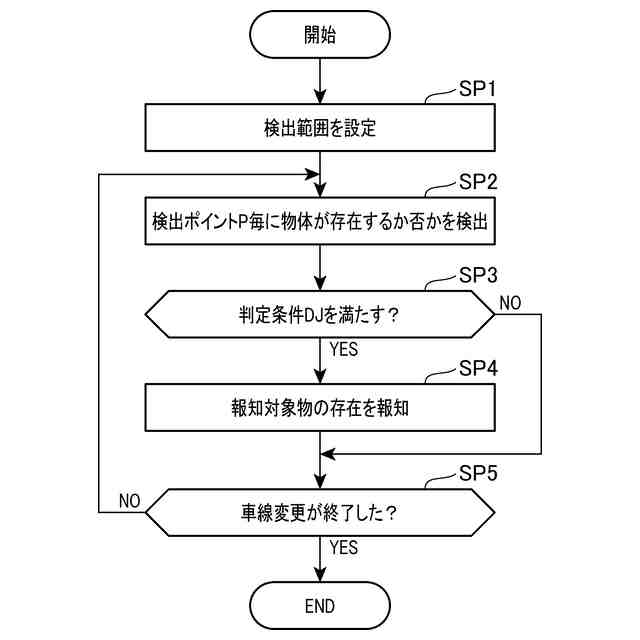
ウインカー操作時の走行支援装置の動作を示すフローチャートである。
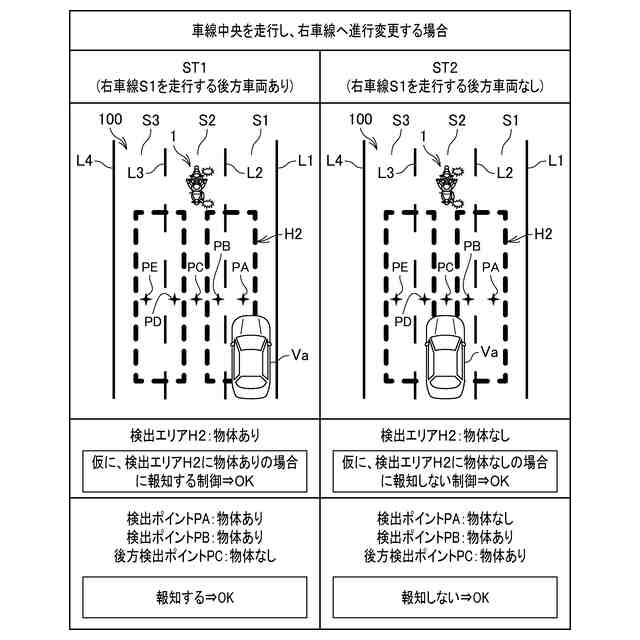
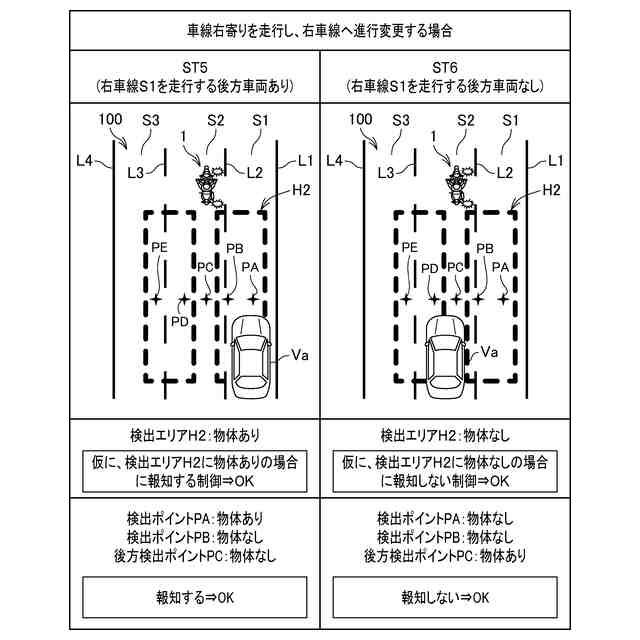
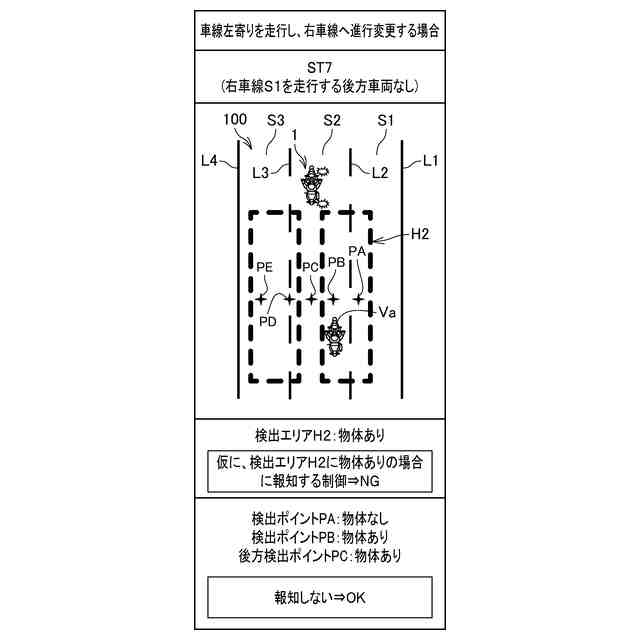
図5中のステップSP2~SP4の処理の説明に供する図である。
図5中のステップSP2~SP4の処理の説明に供する図である。
図5中のステップSP2~SP4の処理の説明に供する図である。
図5中のステップSP2~SP4の処理の説明に供する図である。
【発明を実施するための形態】
【0008】
以下、図面を参照して本発明の実施の形態について説明する。
図1は、本発明の実施形態に係る走行支援装置10を周辺構成と共に示すブロック図である。この走行支援装置10は、車両1に搭載される装置であり、車両1の周囲に存在する他車両に相当する物体を検出し、検出結果を報知する装置の一つである。検出対象の他車両は、走行中に死角になりやすい位置に存在する車両である。
すなわち、この走行支援装置10は、走行中に死角になりやすい位置に存在する他車両の存在を、車両1の運転者(ライダー)に報知するBSI(Blind Spot Information)機能を有する装置である。そのため、走行支援装置10は、運転支援装置、死角監視装置、及び車載装置などと言うこともできる。
【0009】
本実施形態において、車両1は、自動二輪車であり、検出対象の他車両は、四輪車や自動二輪車を含む任意の車両である。
但し、車両1は、自動二輪車に限定しなくてもよく、自動二輪車以外も含む鞍乗り型車両でもよいし、鞍乗り型車両以外も含む小型車両でもよい。また、本発明は、同じ車線内で幅方向に様々な走行位置を取り得る状況が発生する車両に適用することが好ましい。そのため、車両1には、車幅に比して広い路面を走行する可能性のある車両を広く適用できる。また、車両1に、小型車両以外を適用してもよく、例えば、四輪車を適用してもよい。
【0010】
図1に示すように、車両1は、走行支援装置10に関わる構成として、車両1の周囲情報を取得する周囲情報取得部2と、車両1の情報を取得する車載センサ3と、車両1の運転者が操作する操作部4とを備えている。
以下の説明において、走行支援装置10を搭載する車両1を「自車両1」と適宜に表記する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
7日前
個人
自動車ケアフル灯
4日前
個人
黄色点滅式信号機
1か月前
個人
空飛ぶ自動車の空路
1か月前
個人
忘れ物検出装置
28日前
個人
出会い頭事故防止装置
25日前
能美防災株式会社
発信機
7日前
日本信号株式会社
情報管理システム
25日前
株式会社島津製作所
警報装置
1か月前
ホーチキ株式会社
監視システム
13日前
株式会社JVCケンウッド
通知システム
11日前
株式会社SUBARU
車速制御システム
28日前
合同会社ORIC-LAB
太陽光発電管理装置
1か月前
タック株式会社
安全監視システム
11日前
株式会社アジラ
注目行動呼びかけシステム
6日前
日本信号株式会社
路側装置及びセンサ装置
14日前
本田技研工業株式会社
路面評価装置
1か月前
三菱ロジスネクスト株式会社
搬送システム
7日前
三菱ロジスネクスト株式会社
搬送システム
7日前
本田技研工業株式会社
路面評価装置
1か月前
三菱ロジスネクスト株式会社
搬送システム
7日前
三菱ロジスネクスト株式会社
搬送システム
7日前
河村電器産業株式会社
警報装置
27日前
株式会社デンソー
運転支援装置
19日前
トヨタ自動車株式会社
車両
6日前
株式会社知財事業研究所
運行計画作成システム
1か月前
トヨタ自動車株式会社
方法
18日前
株式会社 ミックウェア
情報処理装置、情報処理方法
25日前
愛知時計電機株式会社
生活データ集計装置
5日前
矢崎総業株式会社
路面監視装置
5日前
エムケー精工株式会社
信号機および信号機の発光制御方法
19日前
パナソニックIPマネジメント株式会社
火災警報器
5日前
日本宅配システム株式會社
入館管理システム
1か月前
本田技研工業株式会社
運転支援システム
1か月前
トヨタ自動車株式会社
システム
1か月前
ホーチキ株式会社
通報装置及び非常通報システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ