TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025056491
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023165995
出願日
2023-09-27
発明の名称
位置補正装置、位置補正方法、位置補正用のマーカー
出願人
株式会社デンソーウェーブ
代理人
弁理士法人サトー
主分類
B25J
13/08 20060101AFI20250401BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】位置を補正可能な範囲を拡大することができる位置補正装置、位置補正方法、および、位置補正用のマーカーを提供する。
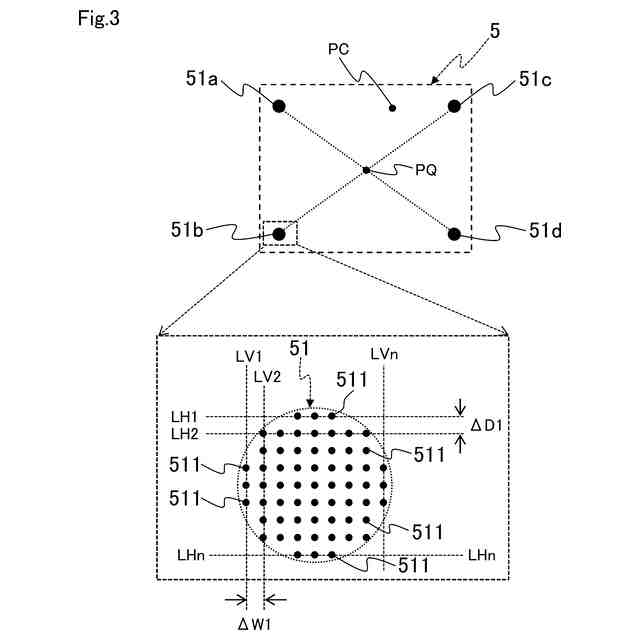
【解決手段】実施形態による位置補正装置1は、カメラ4と、マーカー5に基づいて位置を補正する制御装置3とを備えている。マーカー5は、第1の配置パターンで配置されている複数の特徴点51を有し、それぞれの特徴点51が第2の配置パターンで配置された微細画像511の集合体で構成されている。制御装置3は、カメラ4で撮像した画像からマーカー5を検出する処理と、マーカー5が検出された場合、マーカー5に基づいて位置を補正する処理と、マーカー5が検出されなかった場合、いずれかの特徴点51を検出する処理と、検出された特徴点51が視野の中心となるように視野を変更する処理と、視野を変更した後にカメラ4で再度撮像する処理とを実行する。
【選択図】図1
特許請求の範囲
【請求項1】
マーカーを利用して位置を補正する位置補正装置であって、
カメラと、
前記カメラで撮像した前記マーカーに基づいて位置を補正する制御装置と、を備え、
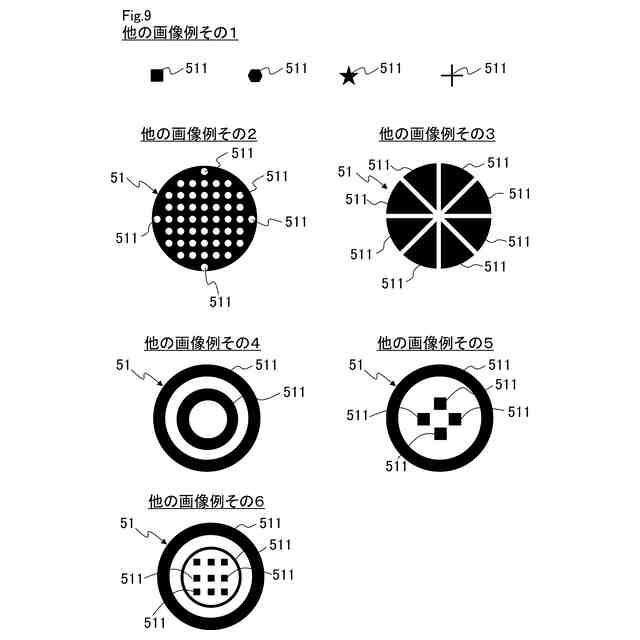
前記マーカーは、所定の第1の配置パターンで配置されている複数の特徴点を有し、全ての特徴点の位置関係に基づいて位置の補正が可能なものであるとともに、それぞれの特徴点が所定の第2の配置パターンで配置された微細画像の集合体で構成されており、
前記制御装置は、
前記カメラで撮像した画像から前記マーカーを検出する処理と、
前記マーカーが検出された場合、前記マーカーに基づいて位置を補正する処理と、
前記マーカーが検出されなかった場合、いずれかの特徴点を検出する処理と、
検出された特徴点が視野の中心となるように視野を変更する処理と、
視野を変更した後に前記カメラで再度撮像する処理と、
を実行する位置補正装置。
続きを表示(約 840 文字)
【請求項2】
前記カメラは、ロボットに設けられており、
前記制御装置は、前記ロボットの姿勢を制御することにより位置を補正する請求項1記載の位置補正装置。
【請求項3】
前記カメラは、移動体に設けられており、
前記制御装置は、前記移動体を制御することにより位置を補正する請求項1記載の位置補正装置。
【請求項4】
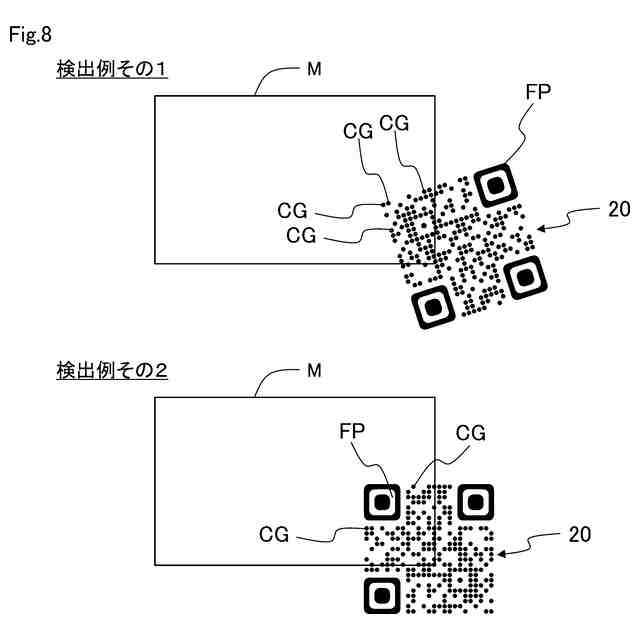
前記マーカーは、二次元のマトリックス状に配置されたセルに提供する情報に応じた明部または暗部が割り当てられた二次元コードであり、
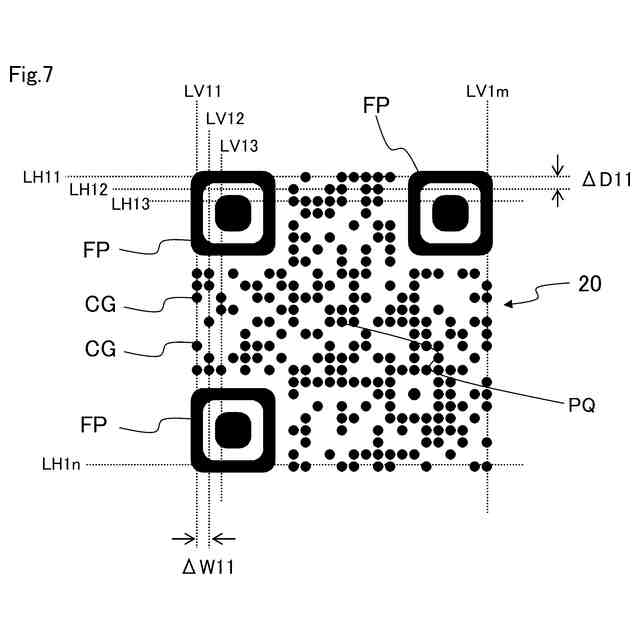
前記制御装置は、前記二次元コードを前記マーカーとして検出するとともに、前記二次元コードを構成する画像の配置パターンに基づいて特徴点を検出する請求項1記載の位置補正装置。
【請求項5】
マーカーを利用して位置を補正する位置補正方法であって、
前記マーカーは、所定の第1の配置パターンで配置されている複数の特徴点を有し、全ての特徴点の位置関係に基づいて位置の補正が可能なものであるとともに、それぞれの特徴点が所定の第2の配置パターンで配置された微細画像の集合体で構成されており、
前記カメラで撮像した画像から前記マーカーを検出する工程と、
前記マーカーが検出された場合、前記マーカーに基づいて位置を補正する工程と、
前記マーカーが検出されなかった場合、いずれかの特徴点を検出する工程と、
検出された特徴点が視野の中心となるように視野を変更する工程と、
視野を変更した後に前記カメラで再度撮像する処理と工程と、
を含む位置補正方法。
【請求項6】
所定の第1の配置パターンで配置されている複数の特徴点で構成されており、全ての特徴点の位置関係に基づいて位置の補正が可能なものであるとともに、それぞれの特徴点が所定の第2の配置パターンで配置された微細画像の集合体で構成されている位置補正用のマーカー。
発明の詳細な説明
【技術分野】
【0001】
本開示は、マーカーを利用して位置を補正する位置補正装置、位置補正方法、および、位置補正用のマーカーに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
例えば作業用のロボットは、繰り返し動作を行うことからワークや部品に対して適切な位置関係になっていることが必要になる。そのため、例えば特許文献1では、マーカーを用いてロボットの教示点を補正することが提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-77614号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
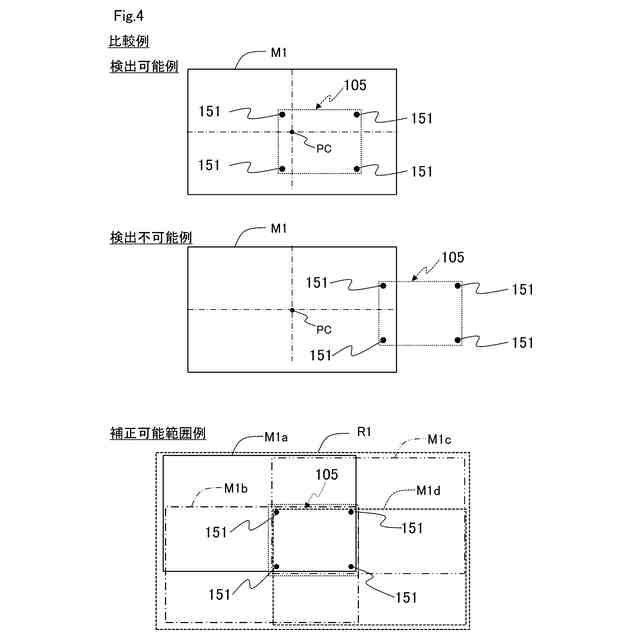
このような位置補正用のマーカーは、一般的に所定の配置パターンで配置された複数の特徴点を有しており、各特徴点の位置関係に基づいて位置の補正が可能となっている。
【0005】
しかしながら、従来の手法では、マーカーの全体が視野内に存在することを前提したものとなっていた。そのため、従来の手法では、仮にマーカーの一部の特徴点が視野内に存在していたとしても、それを特徴点であると認識することができず、位置の補正が可能になる範囲が制限されていた。
【0006】
本開示は、上記した事情に鑑みてなされたものであり、その目的は、位置を補正可能な範囲を拡大することができる位置補正装置、位置補正方法、および、位置補正用のマーカーを提供することにある。
【課題を解決するための手段】
【0007】
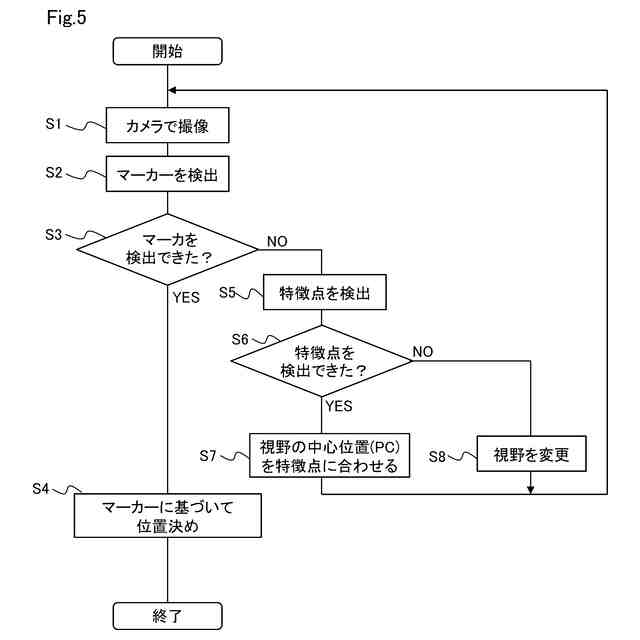
本開示による位置補正装置は、マーカーを利用して位置を補正する位置補正装置であって、カメラと、カメラで撮像したマーカーに基づいて位置を補正する制御装置と、を備えている。マーカーは、所定の第1の配置パターンで配置されている複数の特徴点を有し、全ての特徴点の位置関係に基づいて位置の補正が可能なものであるとともに、それぞれの特徴点が所定の第2の配置パターンで配置された微細画像の集合体で構成されている。そして、制御装置は、カメラで撮像した画像からマーカーを検出する処理と、マーカーが検出された場合、マーカーに基づいて位置を補正する処理と、マーカーが検出されなかった場合、いずれかの特徴点を検出する処理と、検出された特徴点が視野の中心となるように視野を変更する処理と、視野を変更した後にカメラで再度撮像する処理と、を実行する。
【図面の簡単な説明】
【0008】
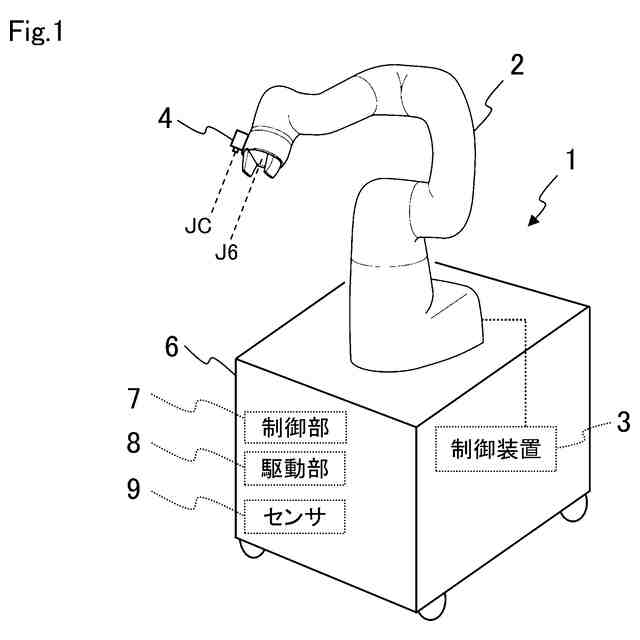
実施形態による位置補正装置の構成を模式的に示す図
位置補正装置の利用形態例を模式的に示す図
マーカーの構造例を模式的に示す図
比較例であり、従来手法によるマーカーの検出態様を説明する図
位置補正処理の流れを説明する図
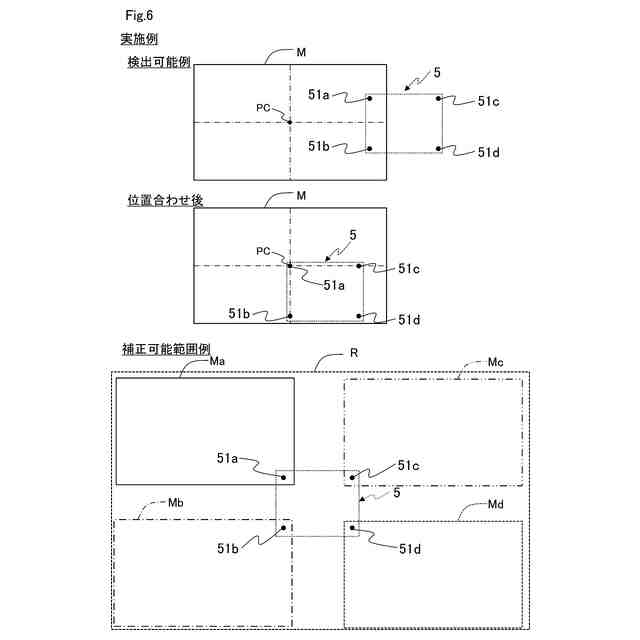
実施例であり、マーカーの検出態様を説明する図
マーカーとしての二次元コードの構造例を模式的に示す図
二次元コードの検出態様を説明する図
他の画像例を模式的に示す図
【発明を実施するための形態】
【0009】
図1に示すように、本実施形態による位置補正装置1は、ロボット2と、そのロボット2を制御する制御装置3と、カメラ4とを備えている。ロボット2は、本実施形態では垂直多関節型のいわゆる6軸ロボットを採用している。このロボット2は、周知のように第1軸から第6軸(J6)までの6つの回転軸を有し、制御装置3からの指令に基づいて各回転軸を中心にアームが回転することにより姿勢に変化して様々な作業に対応可能なものである。なお、ロボット2としては、いわゆる7軸ロボットであってもよいし、水平多関節型のいわゆる4軸ロボットであってもよい。
【0010】
カメラ4は、本実施形態では、その視野の中心を示す中心軸(JC)が、いわゆるロボット2の手先の向きを示す第6軸(J6)と同じ向きとなる状態でロボット2に取り付けられている。そのため、カメラ4とロボット2との間の相対的な位置関係は固定されていることから、後述するようにカメラ4の位置を正しく補正することができれば、ロボット2の姿勢を適切に制御することが可能となる。なお、カメラ4は、撮像した画像を制御装置3に出力可能に接続されており、制御装置3は、カメラ4で撮像した画像に含まれているマーカー5に基づいて位置を補正する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
26日前
株式会社アイセイ
搬送装置
1か月前
国立大学法人金沢大学
ロボット
1か月前
個人
けがき用治具
20日前
株式会社不二越
ロボット
18日前
個人
深孔スリーブ駆動ロッド構造
10日前
株式会社不二越
ロボット操作装置
17日前
川崎重工業株式会社
ロボット
18日前
個人
バール
10日前
株式会社黒澤鉄工製作所
けがき用治具
20日前
川崎重工業株式会社
ロボットシステム
26日前
株式会社デンソー
操縦桿
18日前
工機ホールディングス株式会社
作業機
5日前
梅馨堂合同会社
人協働ロボットシステム
12日前
ARMA株式会社
UI付エンドエフェクタ
13日前
株式会社不二越
基板搬送用ロボット
27日前
アピュアン株式会社
衝撃工具
1か月前
株式会社デンソーウェーブ
ロボット制御システム
3日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
17日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
作業機
1か月前
若井ホールディングス株式会社
レンチ構造とその製造方法
20日前
学校法人法政大学
装着型アシスト装置
7日前
アピュアン株式会社
エアー式衝撃工具
今日
三菱電機株式会社
トルク締め個所検出システム
10日前
株式会社マキタ
打ち込み工具
1か月前
高丸工業株式会社
ロボット操作システムの動作方法
10日前
株式会社不二越
ロボットの教示システム及び教示方法
4日前
シブヤパッケージングシステム株式会社
物品移載装置
18日前
中国電力株式会社
電動ドライバー
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ