TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025055743
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023165114
出願日
2023-09-27
発明の名称
車両制御装置、及び、車両制御方法
出願人
日立Astemo株式会社
代理人
ポレール弁理士法人
主分類
G08G
1/01 20060101AFI20250401BHJP(信号)
要約
【課題】 狭路を協調的に相互通過するために必要な情報を逐次更新できる車両制御装置を提供する。
【解決手段】 相互通過不能領域が存在する道路に相互通過可能領域を決定する通過可能領域候補決定部と、移動体の移動情報を検出する移動体移動情報検出部と、道路を自車両と移動体が通過するための、自車両と移動体それぞれの行動ステップの組み合わせである相互通過パターンを少なくとも一つ以上推定する相互通過パターン推定部と、移動情報に基づいて予測される移動体の予測行動と、相互通過可能領域において自車両と移動体がすれ違う場合の移動体の行動ステップの一致レベルを評価する移動体行動一致レベル評価部と、一致レベルに基づいて、少なくとも一つの相互通過パターンを選択する相互通過パターン選択部と、選択された相互通過パターンにおいて自車両と移動体が相互に通過するための自車両の自動運転及び/又は運転支援に用いる情報を生成する自動運転・運転支援情報生成部と、を備える車両制御装置。
【選択図】 図2
特許請求の範囲
【請求項1】
自車両と移動体がすれ違い不能な相互通過不能領域が存在する道路において、前記自車両と前記移動体がすれ違い可能な一又は複数の相互通過可能領域を決定する通過可能領域候補決定部と、
前記移動体の移動情報を検出する移動体移動情報検出部と、
前記道路を前記自車両と前記移動体が通過するための、前記自車両と前記移動体それぞれの行動ステップの組み合わせである相互通過パターンを少なくとも一つ以上推定する相互通過パターン推定部と、
前記移動情報に基づいて予測される前記移動体の予測行動と、前記相互通過可能領域において前記自車両と前記移動体がすれ違う場合の前記移動体の行動ステップの一致レベルを評価する移動体行動一致レベル評価部と、
前記一致レベルに基づいて、少なくとも一つの相互通過パターンを選択する相互通過パターン選択部と、
前記選択された相互通過パターンにおいて前記自車両と前記移動体が相互に通過するための前記自車両の自動運転及び/又は運転支援に用いる情報を生成する自動運転・運転支援情報生成部と、
を備えることを特徴とする車両制御装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記移動情報は、前記移動体の速度に関する情報を含み、
前記行動ステップは、前記移動体の目標位置に関する情報を含み、
前記移動体行動一致レベル評価部は、前記相互通過パターンにおける前記移動体の行動ステップの目標位置に対する距離及び接近速度に基づいて、前記移動体の予測行動と前記行動ステップとの一致レベルを評価することを特徴とする車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記移動情報は、前記移動体の過去の軌道点列に関する情報を含み、
前記行動ステップは、前記移動体の目標位置に関する情報を含み、
前記移動体移動情報検出部は、前記移動体の過去の軌道点列に基づいて、前記移動体の将来の軌道点列を予測し、
前記移動体行動一致レベル評価部は、前記相互通過パターンにおける前記移動体の行動ステップの目標位置に向かって前記移動体が走行する場合の経路を推定し、推定した経路と前記将来の軌道点列の位置誤差の大きさに基づいて、前記一致レベルを評価することを特徴とする車両制御装置。
【請求項4】
請求項1に記載の車両制御装置において、
前記行動ステップは、前記移動体の目標位置に関する情報を含み、
前記移動体行動一致レベル評価部は、前記相互通過パターンにおける前記移動体の行動ステップの目標位置に向かって前記移動体が走行する場合の経路を推定し、推定した経路の走行に必要となる操舵角の大きさに基づいて、前記一致レベルを評価することを特徴とする車両制御装置。
【請求項5】
請求項1に記載の車両制御装置において、
前記自動運転・運転支援情報生成部は、前記相互通過パターン選択部が選択した相互通過パターンを、HMI装置を介して運転者に提示することを特徴とする車両制御装置。
【請求項6】
請求項5に記載の車両制御装置において、
前記相互通過パターン選択部は、前記HMI装置を介して提示した相互通過パターンに運転者が従わなかった場合に、他の相互通過パターンを選択することを特徴とする車両制御装置。
【請求項7】
請求項5に記載の車両制御装置において、
前記相互通過パターン選択部は、最初に選択した相互通過パターンに後退の行動ステップが含まれる場合に、他の相互通過パターンを選択することを特徴とする車両制御装置。
【請求項8】
車両制御装置が実行する車両制御方法であって、
自車両と移動体がすれ違い不能な相互通過不能領域が存在する道路において、前記自車両と前記移動体がすれ違い可能な一又は複数の相互通過可能領域を決定する通過可能領域候補決定ステップと、
前記移動体の移動情報を検出する移動体移動情報検出ステップと、
前記道路を前記自車両と前記移動体が通過するための、前記自車両と前記移動体それぞれの行動ステップの組み合わせである相互通過パターンを少なくとも一つ以上推定する相互通過パターン推定ステップと、
前記移動情報に基づいて予測される前記移動体の予測行動と、前記相互通過可能領域において前記自車両と前記移動体がすれ違う場合の前記移動体の行動ステップの一致レベルを評価する移動体行動一致レベル評価ステップと、
前記一致レベルに基づいて、少なくとも一つの相互通過パターンを選択する相互通過パターン選択ステップと、
前記選択された相互通過パターンにおいて前記自車両と前記移動体が相互に通過するための前記自車両の自動運転及び/又は運転支援に用いる情報を生成する自動運転・運転支援情報生成ステップと、
を備えることを特徴とする車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援または自動運転に好適な、車両制御装置、及び、車両制御方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、車両の快適で安全な運転支援や自動運転を実現するため、狭い道路環境での協調走行を実現する技術が望まれている。特に、狭路で対向車両と出会った場合、待避できるスペース等を利用しながら対向車両と協調的にすれ違い走行を実施する運転支援システムが提案されている。
【0003】
例えば、特許文献1の要約書では、課題として「すれ違いを安全かつスムーズに行うことができる運転支援システムを提供する。」と記載されており、解決手段として「車載制御装置50において、運転者の運転履歴に基づいて、運転者のすれ違い操作に関する運転技量を評価し、車両の車体情報及びセンタ制御装置10において評価された道路状況とに基づき、車両がすれ違いを行う道路において、少なくとも1つのすれ違い位置及びそのすれ違い位置におけるすれ違いの容易度合いを算定する。センタ制御装置10では、車両がすれ違いを行う道路の道路情報に基づいて、すれ違いに必要な道路状況を評価し、車載制御装置50にて評価された運転者の運転技量及びすれ違い容易度算定処理によって算定された少なくとも1つのすれ違い位置とそのすれ違い位置におけるすれ違いの容易度合いに基づいて、最も容易なすれ違い位置とすれ違い方法とを決定し、決定されたすれ違い位置とすれ違い方法とを報知手段70で運転者に報知する。」と記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2008-217079号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、狭路で対向車とすれ違う際に、運転支援システムにとって想定外の対向車行動が発生する場合もある。例えば、運転支援システムが運転者の運転技量を踏まえて決定した、最も容易なすれ違い位置とすれ違い方法が、狭路左側の退避スペースで自車両が待機し、その間に対向車が狭路を通過するというシナリオであったにも拘わらず、実際の対向車が狭路右側の退避スペースで待機し、自車両の優先通過を促すこともある。
【0006】
このような場合であっても、特許文献1の運転支援システムは、運転者に報知する情報(最も容易なすれ違い位置とすれ違い方法)を更新しないため、運転者は現在の環境下における最も容易なすれ違い位置とすれ違い方法を、自分の運転技量も踏まえて自身で判断しなければならなかった。
【0007】
そこで、本発明は、周囲の移動体の実際の行動を踏まえ、狭路を協調的に相互通過するために必要な情報を逐次更新することができる、車両制御装置、及び、車両制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本実施例の車両制御装置を、自車両と移動体がすれ違い不能な相互通過不能領域が存在する道路において、前記自車両と前記移動体がすれ違い可能な一又は複数の相互通過可能領域を決定する通過可能領域候補決定部と、前記移動体の移動情報を検出する移動体移動情報検出部と、前記道路を前記自車両と前記移動体が通過するための、前記自車両と前記移動体それぞれの行動ステップの組み合わせである相互通過パターンを少なくとも一つ以上推定する相互通過パターン推定部と、前記移動情報に基づいて予測される前記移動体の予測行動と、前記相互通過可能領域において前記自車両と前記移動体がすれ違う場合の前記移動体の行動ステップの一致レベルを評価する移動体行動一致レベル評価部と、前記一致レベルに基づいて、少なくとも一つの相互通過パターンを選択する相互通過パターン選択部と、前記選択された相互通過パターンにおいて前記自車両と前記移動体が相互に通過するための前記自車両の自動運転及び/又は運転支援に用いる情報を生成する自動運転・運転支援情報生成部と、を備える車両制御装置とした。
【発明の効果】
【0009】
本発明の車両制御装置、及び、車両制御方法によれば、周囲の移動体の実際の行動を踏まえ、狭路を協調的に相互通過するために必要な情報を逐次更新することができる。
【図面の簡単な説明】
【0010】
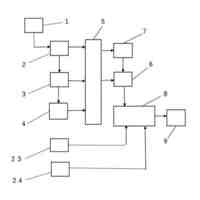
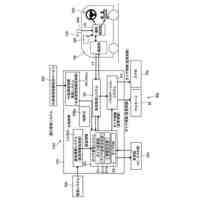
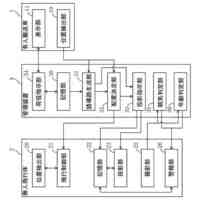
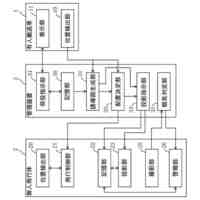
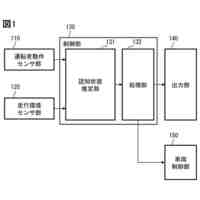
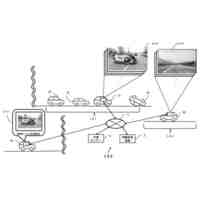
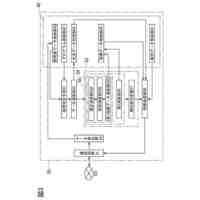
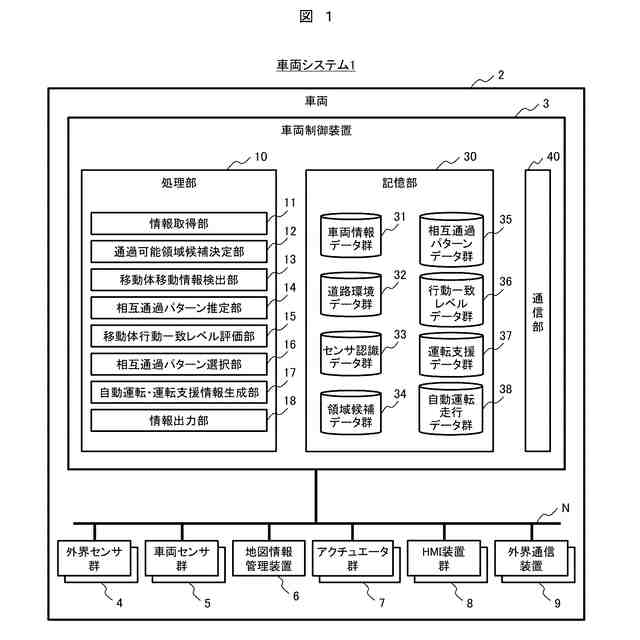
実施例1の車両システムの機能ブロック図である。
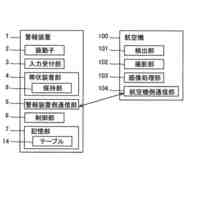
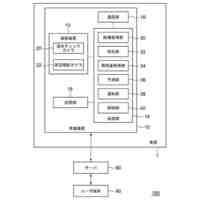
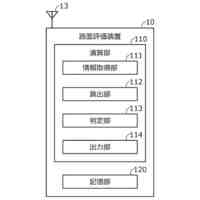
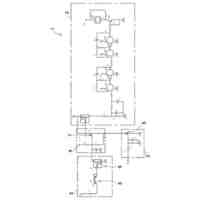
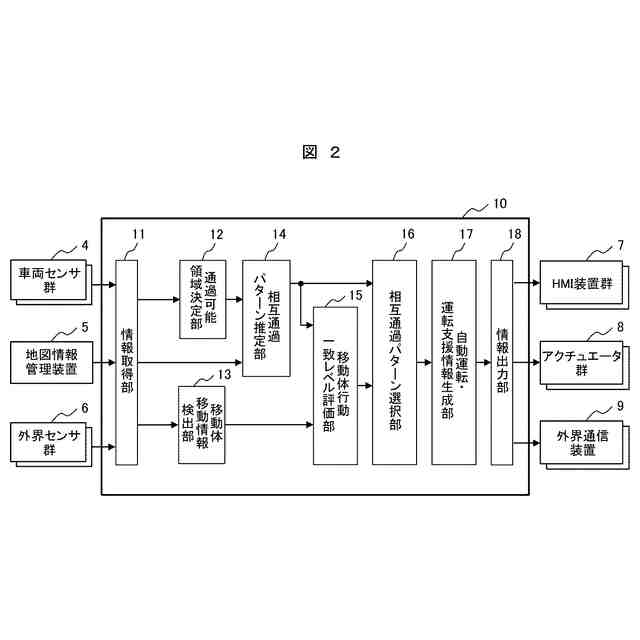
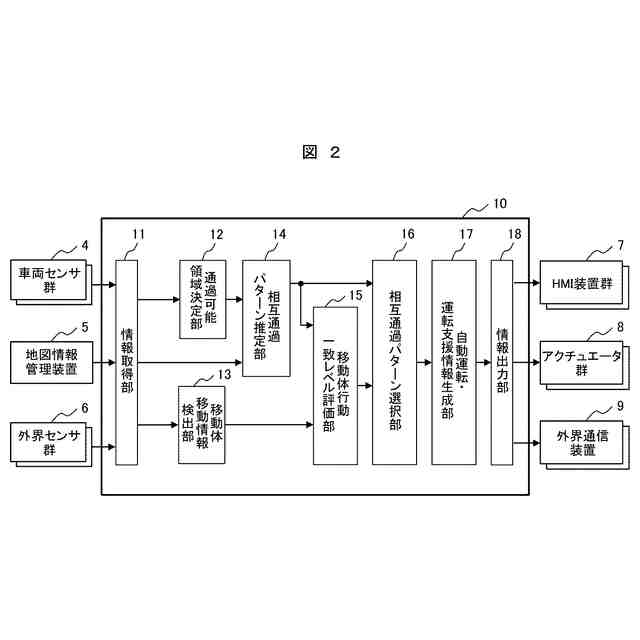
実施例1の車両制御装置の処理部の機能を説明する機能ブロック図。
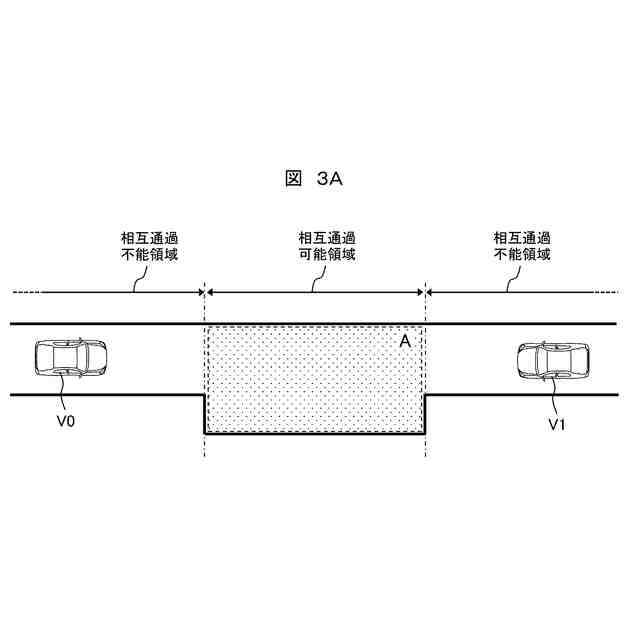
相互通過状況の一例を示す上面図。
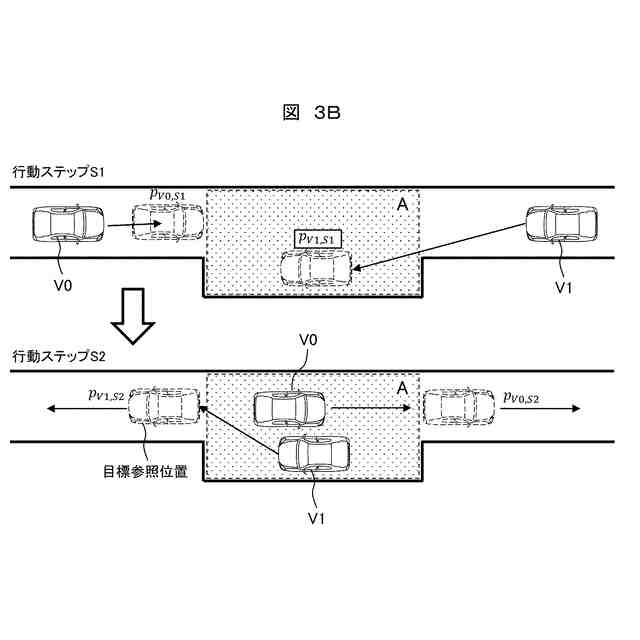
図3Aの相互通過状況で推定した相互通過パターンの一例を示す上面図。
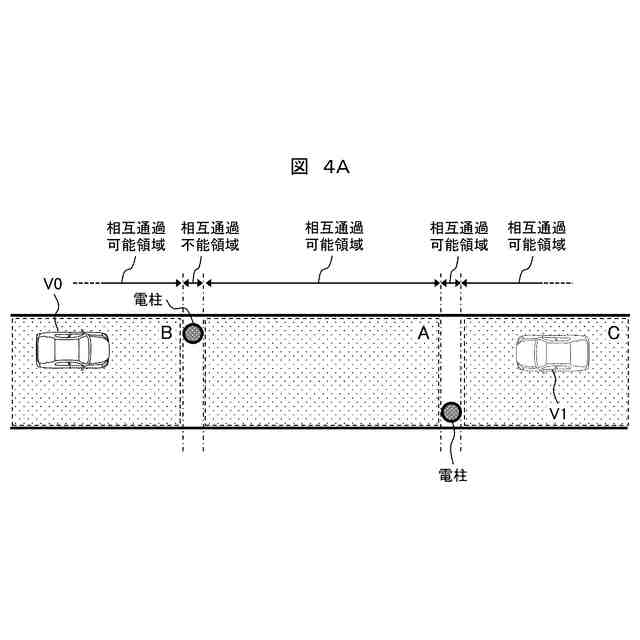
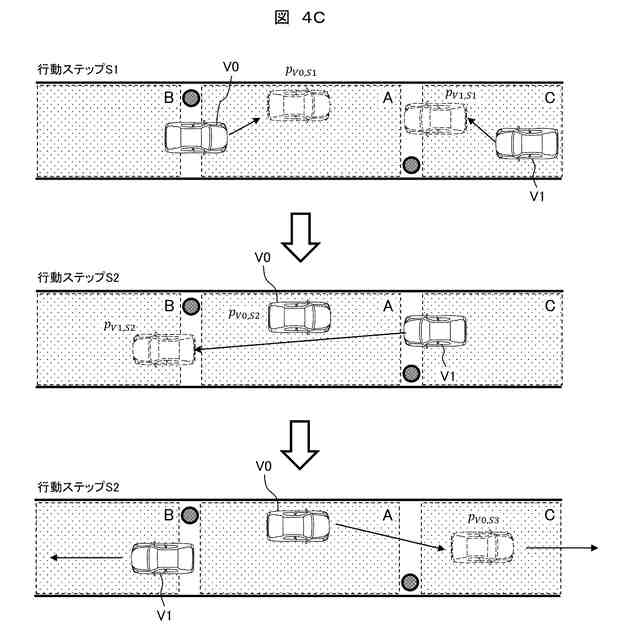
相互通過状況の別例を示す上面図。
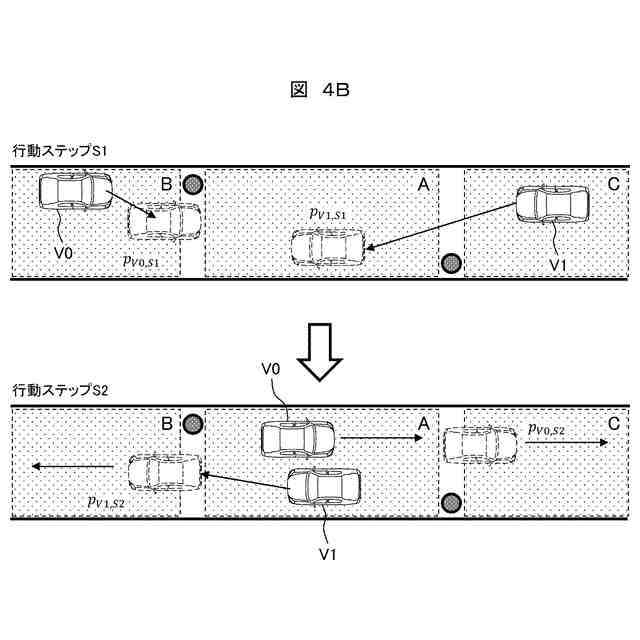
図4Aの相互通過状況で推定した相互通過パターンの一例を示す上面図。
図4Aの相互通過状況で推定した相互通過パターンの別例を示す上面図。
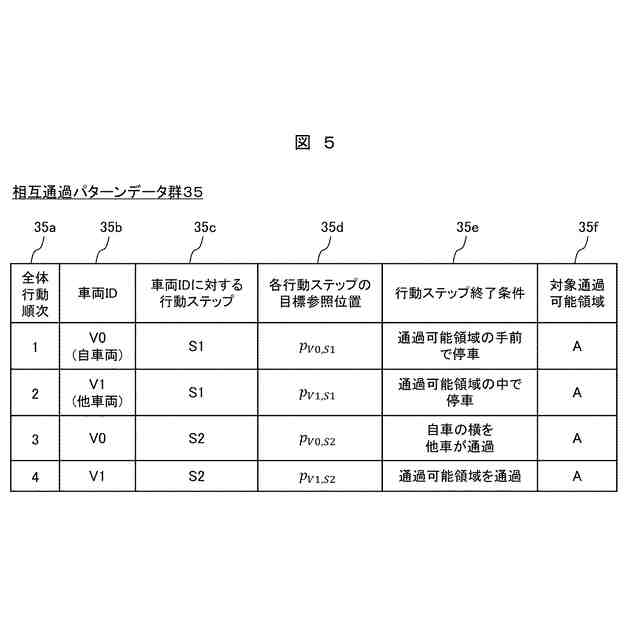
相互通過パターンパターンデータ群の一例。
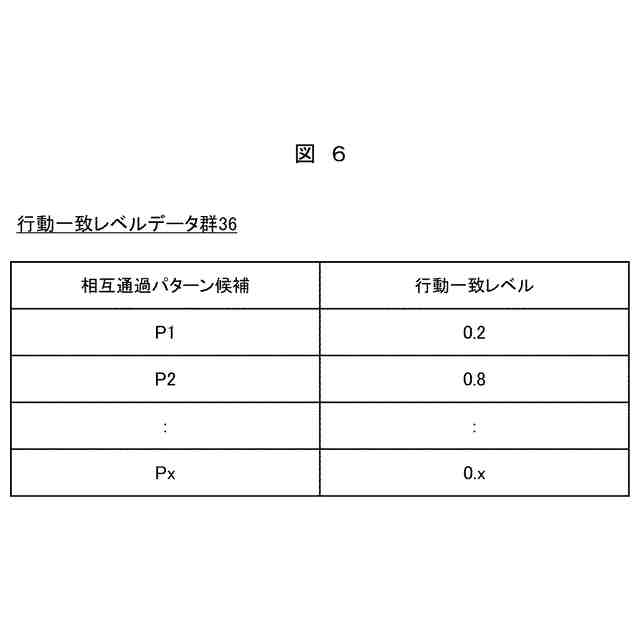
行動一致レベルデータ群の一例。
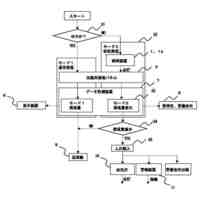
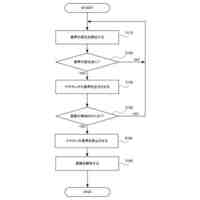
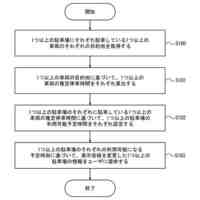
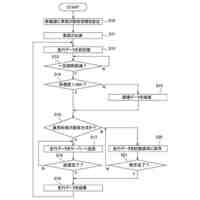
実施例1の車両制御装置による移動体行動一致レベル評価のフローチャート。
実施例1の車両制御装置が算出した移動体行動一致レベルの例。
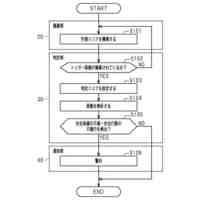
実施例2の車両制御装置による移動体行動一致レベル評価のフローチャート。
実施例2の車両制御装置が算出した移動体行動一致レベルの例。
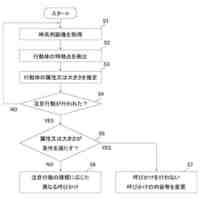
実施例3の車両制御装置による移動体行動一致レベル評価のフローチャート。
実施例3の車両制御装置が算出した移動体行動一致レベルの例。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
7日前
個人
黄色点滅式信号機
1か月前
個人
自動車ケアフル灯
4日前
個人
空飛ぶ自動車の空路
1か月前
個人
忘れ物検出装置
28日前
個人
出会い頭事故防止装置
25日前
能美防災株式会社
発信機
7日前
株式会社島津製作所
警報装置
1か月前
日本信号株式会社
運行管理システム
1か月前
日本信号株式会社
情報管理システム
25日前
ホーチキ株式会社
監視システム
13日前
株式会社SUBARU
車速制御システム
28日前
合同会社ORIC-LAB
太陽光発電管理装置
1か月前
株式会社JVCケンウッド
通知システム
11日前
株式会社SUBARU
危険報知システム
2か月前
タック株式会社
安全監視システム
11日前
三菱ロジスネクスト株式会社
搬送システム
7日前
本田技研工業株式会社
路面評価装置
1か月前
三菱ロジスネクスト株式会社
搬送システム
7日前
三菱ロジスネクスト株式会社
搬送システム
7日前
株式会社アジラ
注目行動呼びかけシステム
6日前
三菱ロジスネクスト株式会社
搬送システム
7日前
日本信号株式会社
路側装置及びセンサ装置
14日前
本田技研工業株式会社
路面評価装置
1か月前
株式会社デンソー
運転支援装置
19日前
河村電器産業株式会社
警報装置
27日前
株式会社 ミックウェア
情報処理装置、情報処理方法
25日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
方法
18日前
株式会社知財事業研究所
運行計画作成システム
1か月前
トヨタ自動車株式会社
車両の情報処理装置
1か月前
愛知時計電機株式会社
生活データ集計装置
5日前
矢崎総業株式会社
路面監視装置
5日前
パナソニックIPマネジメント株式会社
火災警報器
5日前
日本宅配システム株式會社
入館管理システム
1か月前
エムケー精工株式会社
信号機および信号機の発光制御方法
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ