TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025050113
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023158729
出願日
2023-09-22
発明の名称
走行制御装置、走行制御方法、及び走行制御プログラム
出願人
株式会社デンソー
代理人
弁理士法人太陽国際特許事務所
主分類
B60L
15/20 20060101AFI20250327BHJP(車両一般)
要約
【課題】車両の極低速での自律走行を精度良く行うことが可能となる。
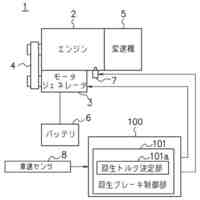
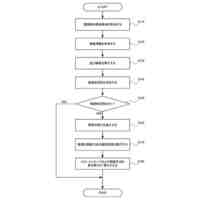
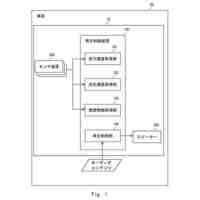
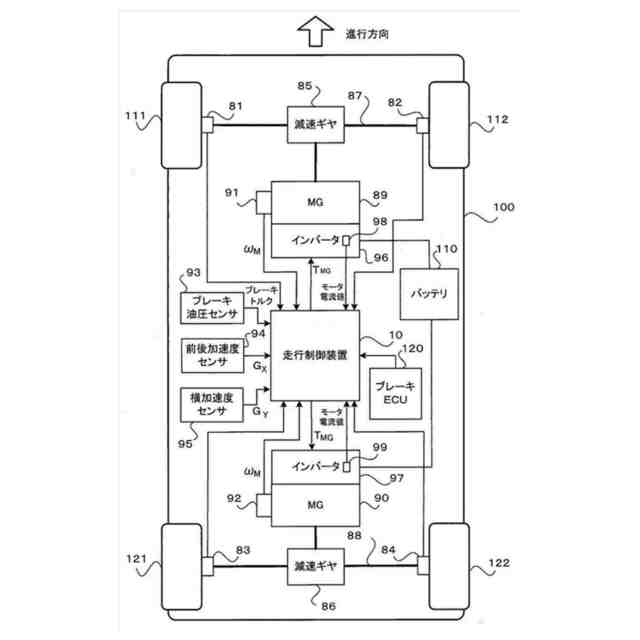
【解決手段】走行制御装置(10)は、車両(100)のタイヤ(111、112、121、122)を駆動するモータ(89、90)のモータ回転速度を取得するモータ回転速度取得部(30)と、前記モータにおいて発生したモータトルクを算出するトルク算出部(31)と、検出されたモータ回転速度と、算出されたモータトルクとに基づいて、前記タイヤの回転速度である車輪速を推定する車輪速推定部(33)と、推定した前記車輪速に基づいて、極低速で前記車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御するトルク制御部(34)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
車両(100)のタイヤ(111、112、121、122)を駆動するモータ(89、90)のモータ回転速度を取得するモータ回転速度取得部(30)と、
前記モータにおいて発生したモータトルクを算出するトルク算出部(31)と、
検出されたモータ回転速度と、算出されたモータトルクとに基づいて、前記タイヤの回転速度である車輪速を推定する車輪速推定部(33)と、
推定した前記車輪速に基づいて、極低速で前記車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御するトルク制御部(34)と、
を備えた走行制御装置(10)。
続きを表示(約 1,100 文字)
【請求項2】
前記タイヤが接触している段差の高さを推定する段差推定部(35)を備え、
前記トルク制御部は、前記車両を前記極低速で走行させるための第1のトルクと、前記段差に応じた第2のトルクと、に基づいて前記要求トルクを算出する
請求項1記載の走行制御装置。
【請求項3】
前記トルク制御部は、路面の勾配に応じた第3のトルクを更に用いて、前記要求トルクを算出する
請求項2記載の走行制御装置。
【請求項4】
前記極低速は、1kph未満の速度である
請求項1記載の走行制御装置。
【請求項5】
前記モータ回転速度取得部は、前記モータに設けられたレゾルバ(91、92)から前記モータ回転速度を取得する
請求項1記載の走行制御装置。
【請求項6】
前記車輪速推定部は、前記モータと前記タイヤとの間を連結する連結部において前記モータの駆動力が伝達される際の伝達特性を用いて、前記車輪速を推定する請求項1記載の走行制御装置。
【請求項7】
前記連結部は、前記モータにおいて発生した回転数を減速させる減速ギヤ(85、86)と、前記減速ギヤの回転を前記タイヤに伝達するためのドライブシャフト(87、88)とから構成されている請求項6記載の走行制御装置。
【請求項8】
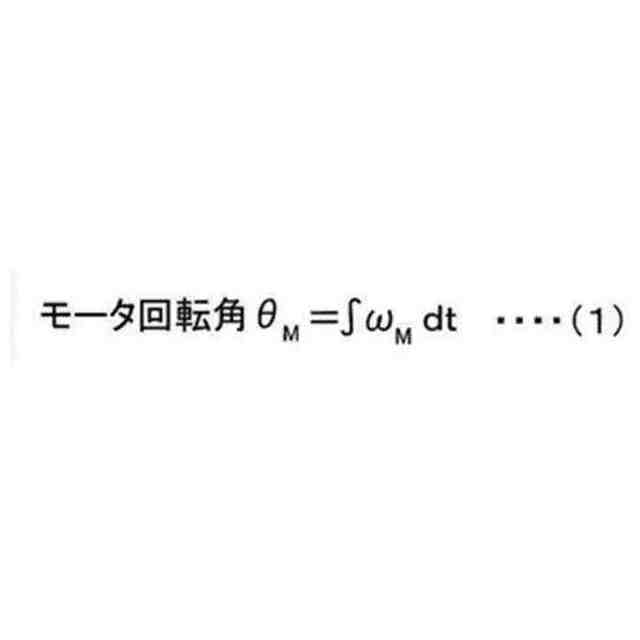
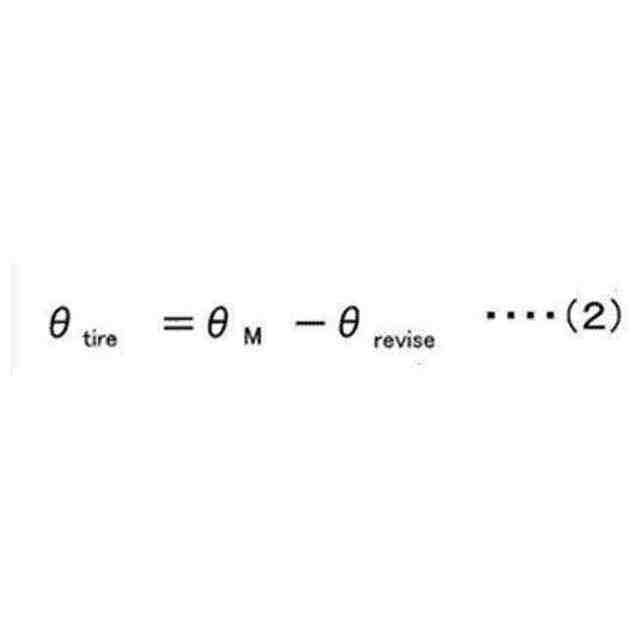
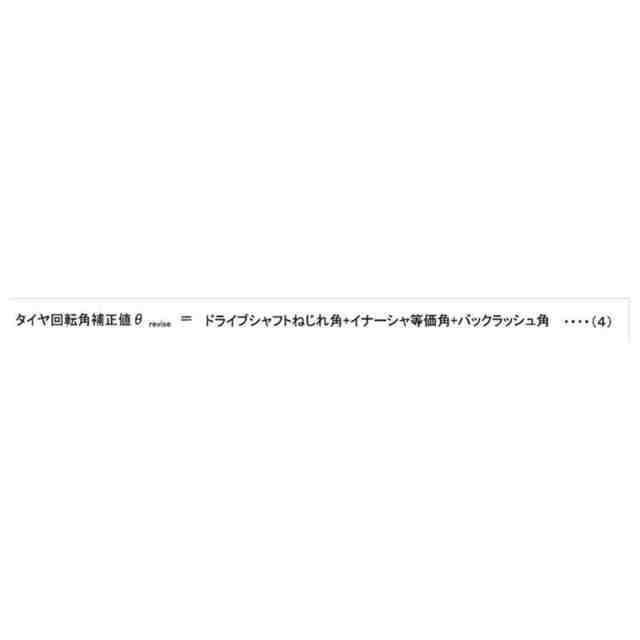
前記車輪速推定部は、前記モータ回転速度に基づいて算出される前記モータの回転角から、前記ドライブシャフトの捻じれにより発生する角度成分と、前記モータの慣性体による角度成分と、前記減速ギヤにおけるバックラッシュに基づく角度成分とを補正値として差し引くことにより前記タイヤの回転角を算出し、算出された前記タイヤの回転角を微分することにより前記車輪速を推定する請求項7記載の走行制御装置。
【請求項9】
前記車輪速推定部は、前記ドライブシャフトの捻じり共振を表現する2次伝達関数を用いて、前記減速ギヤにおけるバックラッシュに基づく角度成分を算出する請求項8記載の車両の走行制御装置。
【請求項10】
前記トルク制御部は、前記モータトルクの極性が反転する際に、前記モータの回転角と前記タイヤの回転角との差分が、前記減速ギヤのバックラッシュ角の最大値未満である場合には、前記車輪速に基づいて前記モータに出力する要求トルクを変化させることにより前記モータの回転制御を行うフィードバック制御におけるフィードバックゲインを小さくする制御を行う、
請求項7~9の何れか1項に記載の走行制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、走行制御装置、走行制御方法、及び走行制御プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、車両の走行を支援する車両の走行支援装置であって、車輪が接触したことを検出できる段差のうち、車両を停止させるための段差のことを車止め用の段差とした場合、車輪が接触した前記段差が前記車止め用の段差であるか否かを判定する判定処理を実施する段差判定部と、前記判定処理によって前記段差が前記車止め用の段差であると判定されたときには、車両の制動力の増大によって車両を停止させることを要求する停止要求制御を実施する制駆動力設定部と、を備える車両の走行支援装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-093761号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
モータで駆動される車両を時速1km未満の極低速で自律走行させたい場合がある。例えば、自動で車両を駐車スペースに駐車させたい場合等のように、狭いスペースで車両を移動させたい場合、生産現場で車両を自走させて組み立てを行う場合等である。車両を自律走行させる場合、車輪速に基づいて車両の走行を制御する必要がある。
【0005】
しかしながら、パルス発生型の車輪速センサを用いて車輪速を検出する場合、極低速だと車速パルスが生成され難くなり実際の車輪速を検出することが困難となる。そのため、極低速での走行制御を精度良く行うことが困難となる可能性がある。
【0006】
本開示は、車両の極低速での自律走行を精度良く行うことが可能となる走行制御装置、走行制御方法、及び走行制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の第1態様に係る走行制御装置は、車両のタイヤを駆動するモータのモータ回転速度を取得するモータ回転速度取得部と、前記モータにおいて発生したモータトルクを算出するトルク算出部と、検出されたモータ回転速度と、算出されたモータトルクとに基づいて、前記タイヤの回転速度である車輪速を推定する車輪速推定部と、推定した前記車輪速に基づいて、極低速で前記車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御するトルク制御部と、を備える。
【0008】
第2態様に係る走行制御方法は、少なくとも1つのプロセッサが、車両のタイヤを駆動するモータのモータ回転速度を取得し、前記モータにおいて発生したモータトルクを算出し、検出されたモータ回転速度と、算出されたモータトルクとに基づいて、前記タイヤの回転速度である車輪速を推定し、推定した前記車輪速に基づいて、極低速で前記車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御する、ことを含む処理を実行する。
【0009】
第3態様に係る走行制御プログラムは、少なくとも1つのプロセッサに、車両のタイヤを駆動するモータのモータ回転速度を取得し、前記モータにおいて発生したモータトルクを算出し、検出されたモータ回転速度と、算出されたモータトルクとに基づいて、前記タイヤの回転速度である車輪速を推定し、推定した前記車輪速に基づいて、極低速で前記車両を走行させるための要求トルクを算出し、算出した要求トルクで前記モータが駆動されるように制御する、ことを含む処理を実行させる。
【発明の効果】
【0010】
本開示によれば、車両の極低速での自律走行を精度良く行うことが可能となる、という効果を有する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
ケース
2日前
日本精機株式会社
表示装置
9日前
日本精機株式会社
表示装置
9日前
個人
アンチロール制御装置
16日前
株式会社松華
懸架装置
28日前
個人
ブレーキシステム
7日前
横浜ゴム株式会社
タイヤ
6日前
個人
ステージカー
28日前
個人
自走式立体型洗車場
24日前
井関農機株式会社
作業車両
14日前
株式会社ユーシン
照明装置
9日前
帝国繊維株式会社
作業車両
1日前
コイト電工株式会社
座席装置
28日前
個人
農業機械への架線給電システム
20日前
スズキ株式会社
車両制御装置
3日前
エムケー精工株式会社
車両処理装置
8日前
株式会社小糸製作所
車両用灯具
9日前
株式会社SUBARU
車載装置
23日前
極東開発工業株式会社
荷役車両
7日前
エムケー精工株式会社
固定式洗車装置
16日前
豊田合成株式会社
エアバッグ装置
24日前
豊田合成株式会社
エアバッグ装置
2日前
豊田合成株式会社
エアバッグ装置
2日前
豊田合成株式会社
ガラスラン
9日前
トヨタ紡織株式会社
送風装置
15日前
株式会社クボタ
作業車
27日前
株式会社SUBARU
エアバッグ装置
1日前
日立建機株式会社
作業車両
2日前
株式会社JVCケンウッド
再生制御装置
6日前
株式会社SUBARU
車両用サンバイザ
24日前
日本プラスト株式会社
エアバッグ
7日前
個人
走行ドローン
15日前
日本精機株式会社
車載表示装置及びその製造方法
8日前
オールセーフ株式会社
レール
24日前
日本プラスト株式会社
風向調整装置
9日前
株式会社ブリヂストン
タイヤ
9日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ