TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025041143
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148253
出願日
2023-09-13
発明の名称
走行ドローン
出願人
個人
代理人
弁理士法人パテントボックス
主分類
B60K
7/00 20060101AFI20250318BHJP(車両一般)
要約
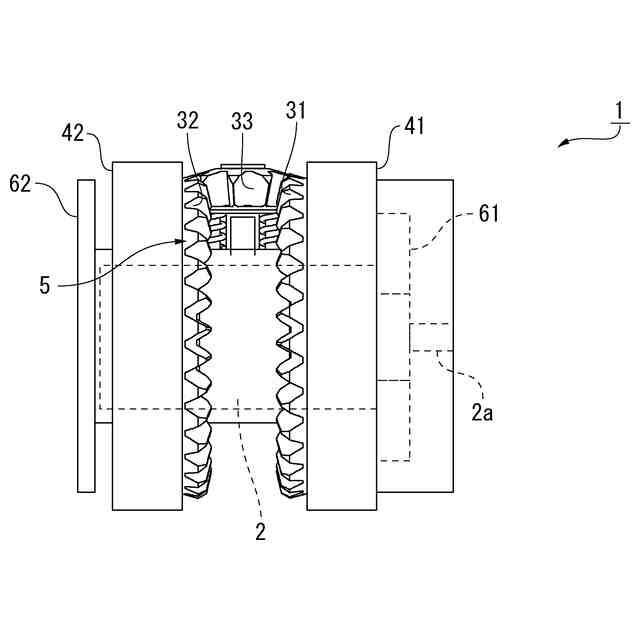
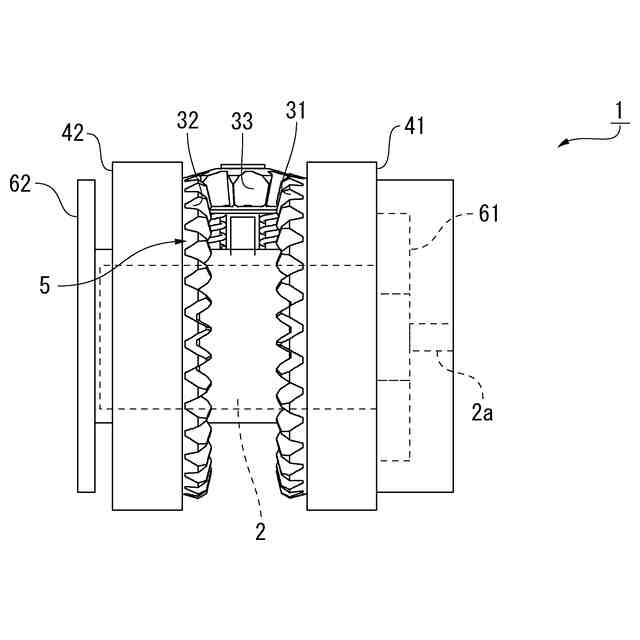
【課題】きわめて単純な構成によって前後・左右に移動することのできる、走行ドローンを提供する。
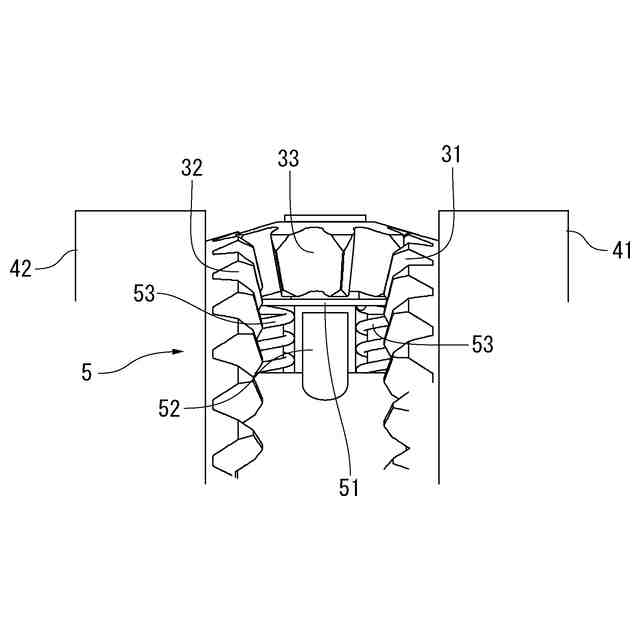
【解決手段】走行ドローン1は、モータとしてのDCモータ2と、DCモータ2に接続され、周方向に沿って第1傘歯車31を有する第1車輪41と、第1車輪41と同一の回転軸を有し、周方向に沿って第2傘歯車32を有する第2車輪42と、第1歯車31と第2歯車32の両方と交差軸を有し、第1傘歯車31と第2傘歯車32の両方に噛み合うようにされている、第3傘歯車33と、を備えている。そして、第3傘歯車33の回転を制動する制動部5をさらに備えており、制動部5がON/OFF駆動されることで第1車輪41と第2車輪42が互いに逆方向/同一方向に回転するようにされている。
【選択図】図1
特許請求の範囲
【請求項1】
モータと、
前記モータに接続され、周方向に沿って第1傘歯車を有する第1車輪と、
前記第1車輪と同一の回転軸を有し、周方向に沿って第2傘歯車を有する第2車輪と、
前記第1歯車と前記第2歯車の両方と交差軸を有し、前記第1傘歯車と前記第2傘歯車の両方に噛み合うようにされている、第3傘歯車と、を備える、走行ドローン。
続きを表示(約 560 文字)
【請求項2】
前記第3傘歯車の回転を制動する制動部をさらに備えており、前記制動部がON/OFF駆動されることで前記第1車輪と前記第2車輪が互いに逆方向/同一方向に回転するようにされている、請求項1に記載された、走行ドローン。
【請求項3】
前記制動部は、前記第3傘歯車に押し付けられるブレーキパッドと、前記ブレーキパッドを進退自在に駆動するソレノイドと、前記ブレーキパッドを付勢する弾性体と、から構成されている、請求項2に記載された、走行ドローン。
【請求項4】
前記第1車輪が回転せずに、前記モータが自転してしまうことを防止する、反トルク部をさらに備える、請求項1乃至請求項3のいずれか一項に記載された、走行ドローン。
【請求項5】
前記反トルク部として、前記モータの軸側に直結されたウェイト、及び/又は、前記モータの尻側に直結されたバッテリー及び制御部をさらに備えている、請求項4に記載された、走行ドローン。
【請求項6】
前記モータは、前記第1車輪及び前記第2車輪の回転軸としても機能し、かつ、前記第1車輪及び前記第2車輪は軸受又はベアリングを介して回転軸としての前記モータに回転自在に支承されている、請求項5に記載された、走行ドローン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ひとつのモータを使用して前後・左右に移動することのできる、走行ドローンに関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から、移動機構に特徴を有するロボットが知られている。例えば、特許文献1に記載された移動機構体は、第1の駆動輪を、接近させる第1の収納機構と、第1の収納機構に連動させて、第2の駆動輪を第1の駆動輪の円周内に収納する第2の収納機構と、第1および第2の収納機構を動作させる展開収納用モータとを有して、収納形態と駆動形態とを相互に変移させ得ることを特徴としている。このような構成のため、逆転機構等を具備せずとも、本体を安定的に移動可能とする移動機構を提供できる、とされている。
【先行技術文献】
【特許文献】
【0003】
特開2010-264555号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1を含む従来の移動体は、複数のモータを有する、割合に複雑な構成を有するものであった。
【0005】
そこで、本発明は、きわめて単純な構成によって前後・左右に移動することのできる、走行ドローンを提供することを目的としている。
【課題を解決するための手段】
【0006】
前記目的を達成するために、本発明の走行ドローンは、モータと、前記モータに接続され、周方向に沿って第1傘歯車を有する第1車輪と、前記第1車輪と同一の回転軸を有し、周方向に沿って第2傘歯車を有する第2車輪と、前記第1歯車と前記第2歯車の両方と交差軸を有し、前記第1傘歯車と前記第2傘歯車の両方に噛み合うようにされている、第3傘歯車と、を備えている。
【発明の効果】
【0007】
このように、本発明の走行ドローンは、モータと、モータに接続され、周方向に沿って第1傘歯車を有する第1車輪と、第1車輪と同一の回転軸を有し、周方向に沿って第2傘歯車を有する第2車輪と、第1歯車と第2歯車の両方と交差軸を有し、第1傘歯車と第2傘歯車の両方に噛み合うようにされている、第3傘歯車と、を備えている。このような構成であるから、きわめて単純な構成によって、前後・左右に移動することのできる、走行ドローンとなる。
【図面の簡単な説明】
【0008】
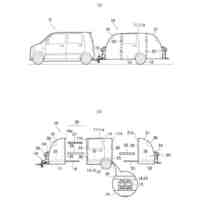
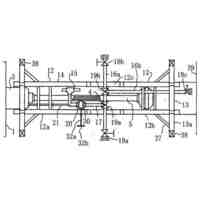
走行ドローンの正面図である。
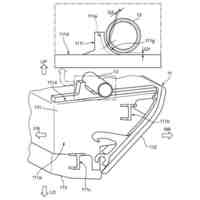
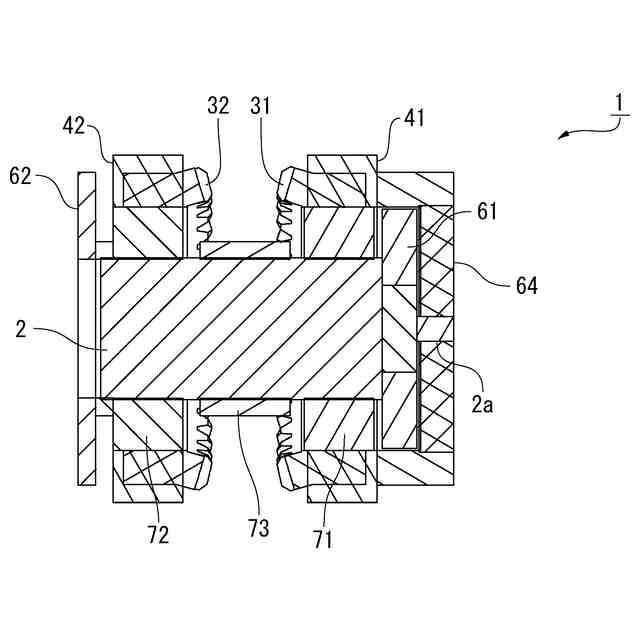
走行ドローンの断面図である。
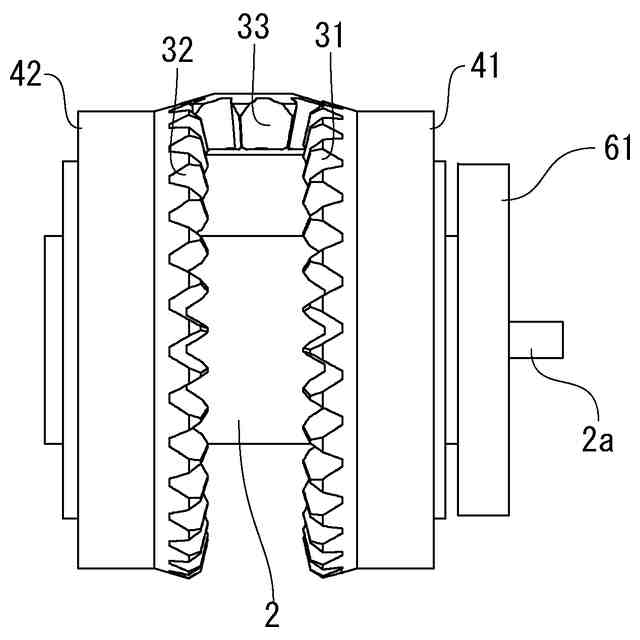
外側の部品を取り外した状態の走行ドローンの正面図である。
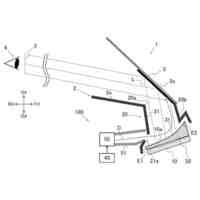
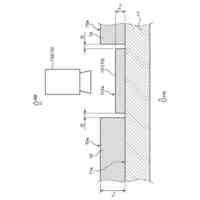
制動部の構造を拡大して説明する拡大説明図である。
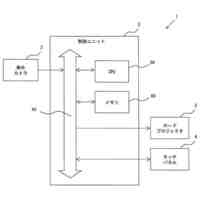
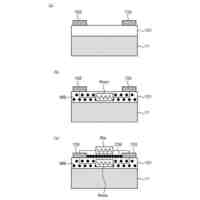
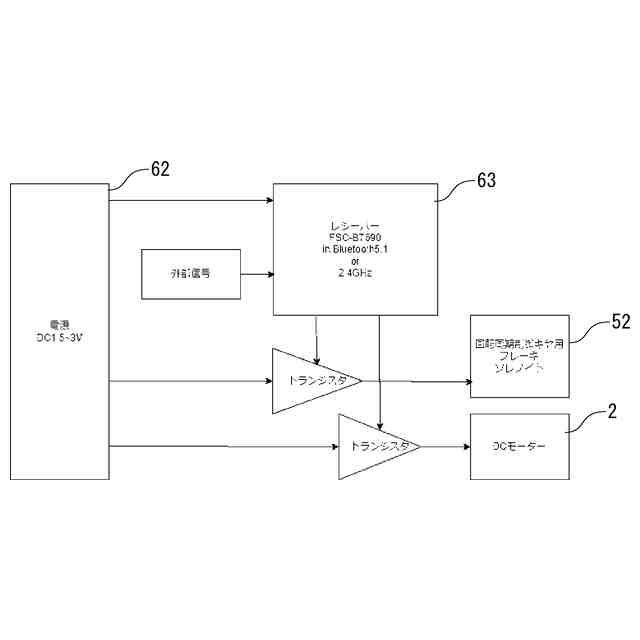
走行ドローンの制御系の構成を説明するブロック図である。
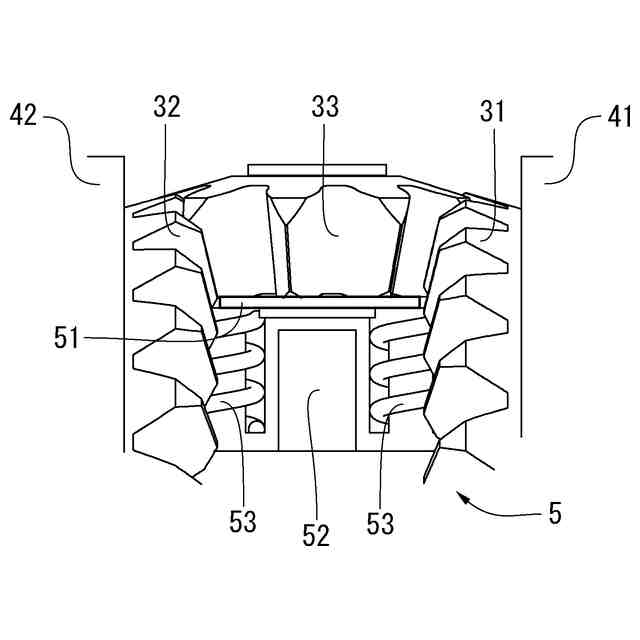
ソレノイドに電力を供給していない状態(OFF)の制動部の拡大図である。
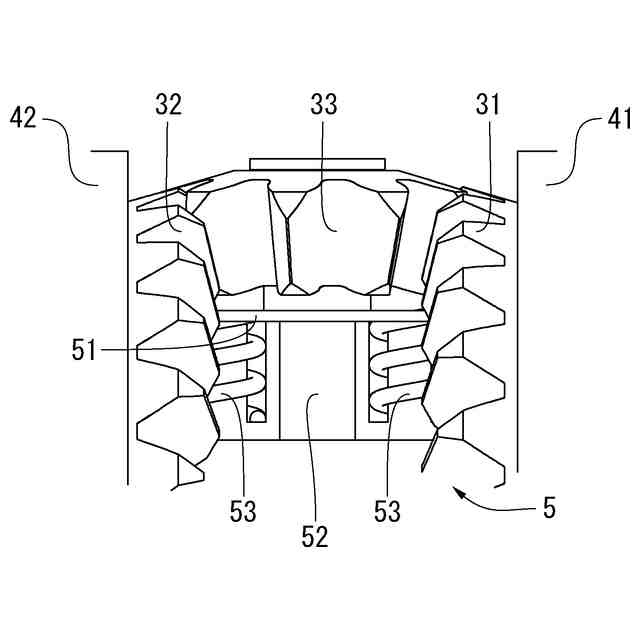
ソレノイドに電力を供給している状態(ON)の制動部の拡大図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態について図面を参照して説明する。ただし、以下の実施例に記載されている構成要素は例示であり、本発明の技術範囲をそれらのみに限定する趣旨のものではない。
【実施例】
【0010】
(構成)
まず、図1~図3を用いて本実施例の走行ドローン1の構成を説明する。本実施例の走行ドローン1は、図1に示すように、第1車輪41と、第2車輪42と、軸部を構成するモータとしてのDCモータ2と、を主に備えている。すなわち、軸部を構成するDCモータ2の両端に、対向するようにして、2つの車輪41、42が回転可能に取り付けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
1か月前
個人
眼科手術車
2か月前
個人
授乳用車両
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
3か月前
個人
アンチロール制御装置
11日前
日本精機株式会社
表示装置
4日前
日本精機株式会社
照明装置
23日前
日本精機株式会社
表示装置
23日前
日本精機株式会社
表示装置
4日前
日本精機株式会社
表示装置
24日前
日本精機株式会社
表示装置
24日前
日本精機株式会社
表示装置
24日前
井関農機株式会社
作業車両
2か月前
個人
台車用車輪止め具
2か月前
株式会社松華
懸架装置
23日前
個人
キャンピングトレーラー
3か月前
個人
ブレーキシステム
2日前
個人
謝意シグナル装着車
3か月前
日本精機株式会社
車載表示装置
3か月前
個人
ステージカー
23日前
横浜ゴム株式会社
タイヤ
1日前
個人
自走式立体型洗車場
19日前
株式会社ユーシン
照明装置
4日前
日本精機株式会社
車両用照明装置
1か月前
日本精機株式会社
車両用表示装置
24日前
日本精機株式会社
車両用表示装置
3か月前
トヨタ自動車株式会社
車両
2か月前
井関農機株式会社
作業車両
9日前
日本精機株式会社
車両用表示装置
24日前
株式会社青木製作所
タンクローリ
2か月前
マツダ株式会社
車両
2か月前
マツダ株式会社
車両
29日前
マツダ株式会社
車両
29日前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ