TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025049669
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023157983
出願日
2023-09-22
発明の名称
自動走行車の運行システム及び自動走行車の運行方法
出願人
株式会社東芝
代理人
弁理士法人iX
主分類
G08G
1/09 20060101AFI20250327BHJP(信号)
要約
【課題】運行の制御性を向上可能な自動走行車の運行システム及び自動走行車の運行方法を提供する。
【解決手段】実施形態によれば、自動走行車の運行システムは、複数の軌道と情報提示部と自動走行車とを含む。前記複数の軌道は、第1軌道と第2軌道とを含む。前記情報提示部は、前記複数の軌道に付設され情報を提示する。前記自動走行車は、前記複数の軌道の位置を読み取り、読み取った軌道に沿って走行する。前記自動走行車は、情報取得部を含む。前記情報取得部は、前記情報提示部から読取範囲内となったときに前記情報提示部から前記情報を取得可能である。前記自動走行車は、前記情報取得部が取得した前記情報に基づいて、前記第1軌道を読み取って前記第1軌道に沿って走行する状態から、前記第2軌道を読み取って前記第2軌道に沿って走行する状態に切り替わる。
【選択図】図1
特許請求の範囲
【請求項1】
第1軌道と、第2軌道と、を含む複数の軌道と、
前記複数の軌道に付設され、情報を提示する情報提示部と、
前記複数の軌道の位置を読み取り、読み取った軌道に沿って走行する自動走行車であって、前記情報提示部から読取範囲内となったときに前記情報提示部から前記情報を取得可能な情報取得部を含む、自動走行車と、
を備え、
前記自動走行車は、前記情報取得部が取得した前記情報に基づいて、前記第1軌道を読み取って前記第1軌道に沿って走行する状態から、前記第2軌道を読み取って前記第2軌道に沿って走行する状態に切り替わる、自動走行車の運行システム。
続きを表示(約 1,300 文字)
【請求項2】
前記第1軌道は、
第1方向に沿って延びる第1本線と、
前記第1本線と接続され、前記第1方向と交差する方向において前記第1本線からずれた位置に設けられた退避線と、
を含み、
前記自動走行車は、前記情報取得部が前記情報提示部から前記情報を取得しなかった場合には、前記第1本線から前記退避線に沿って走行する、請求項1に記載の自動走行車の運行システム。
【請求項3】
前記退避線は、前記第1軌道の終端部を有する、請求項2に記載の自動走行車の運行システム。
【請求項4】
前記複数の軌道は、第3軌道を含み、
前記自動走行車は、前記第2軌道を読み取って前記第2軌道に沿って走行する状態の後に、前記第3軌道を読み取って前記第3軌道に沿って走行する状態に切り替わる、請求項1~3のいずれか1つに記載の自動走行車の運行システム。
【請求項5】
前記自動走行車は、
前記第1軌道の位置を読み取る第1センサと、
前記第2軌道の位置を読み取る第2センサと、
を含み、
前記情報取得部が取得した前記情報に基づいて、前記第1センサで前記第1軌道を読み取って前記第1軌道に沿って走行する状態から、前記第2センサで前記第2軌道を読み取って前記第2軌道に沿って走行する状態に切り替わる、請求項1~3のいずれか1つに記載の自動走行車の運行システム。
【請求項6】
前記自動走行車の進行方向に対して垂直な幅方向において、前記第1センサは、前記第2センサよりも前記自動走行車の中央に位置する、請求項5に記載の自動走行車の運行システム。
【請求項7】
前記第2センサは、前記自動走行車の進行方向に対して垂直な幅方向において、前記第1センサと並ぶ、請求項5に記載の自動走行車の運行システム。
【請求項8】
前記自動走行車は、軌道の位置を読み取り可能な第3センサを含み、
前記第1センサは、前記第2センサと前記第3センサとの間に位置する、請求項5に記載の自動走行車の運行システム。
【請求項9】
前記複数の軌道は、第3軌道を含み、
前記自動走行車は、前記第2センサで前記第2軌道を読み取って前記第2軌道に沿って走行する状態の後に、前記第1センサで前記第3軌道を読み取って前記第3軌道に沿って走行する状態に切り替わる、請求項5に記載の自動走行車の運行システム。
【請求項10】
前記自動走行車は、
第1位置において前記第1軌道の位置を読み取り可能であり、第2位置において前記第2軌道の位置を読み取り可能であるセンサを含み、
前記情報取得部が取得した前記情報に基づいて、前記センサの位置を変更することで、前記第1軌道に沿って走行する状態から、前記第2軌道に沿って走行する状態に切り替わる、請求項1~3のいずれか1つに記載の自動走行車の運行システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、自動走行車の運行システム及び自動走行車の運行方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
工場などにおいては、無人搬送車などの自動走行車(Automatic Guided Vehicle:AGV)を制御する運行システムが用いられることがある。自動走行車は、例えば予め設けられた軌道を読み取って、読み取った軌道に沿って走行する。軌道には、RFIDタグなどのチェックポイントが設置されており、自動走行車は、チェックポイントの通過に対応してチェックポイントから情報を取得する。運行システムは、その情報に基づいて自動走行車等(自動走行車、又は自動走行車と他の機器とを含むシステム)の動作を制御する。
【0003】
例えば、自動走行車がチェックポイントの通過の際に適切に情報を取得できない場合、意図した制御が実行されず、不具合が生じる恐れがある。自動走行車の運行の制御性の向上が望まれる。
【先行技術文献】
【特許文献】
【0004】
特開2020-154978号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の実施形態は、運行の制御性を向上可能な自動走行車の運行システム及び自動走行車の運行方法を提供する。
【課題を解決するための手段】
【0006】
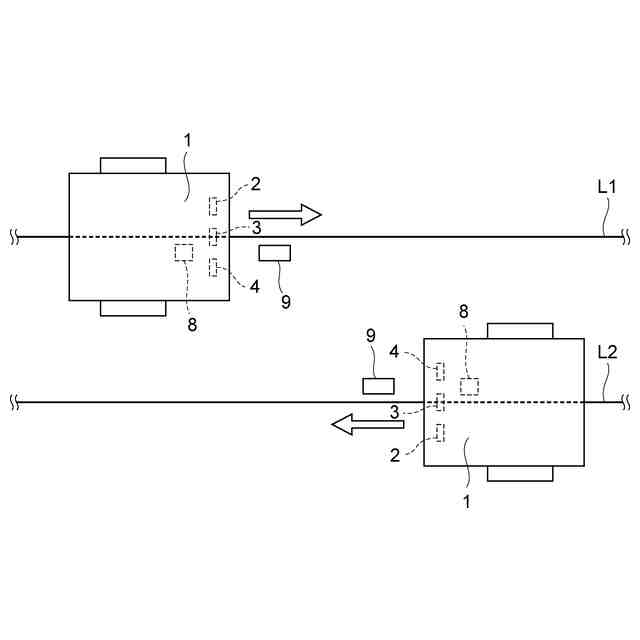
本発明の実施形態によれば、自動走行車の運行システムは、複数の軌道と、情報提示部と、自動走行車と、を含む。前記複数の軌道は、第1軌道と、第2軌道と、を含む。前記情報提示部は、前記複数の軌道に付設され、情報を提示する。前記自動走行車は、前記複数の軌道の位置を読み取り、読み取った軌道に沿って走行する。前記自動走行車は、情報取得部を含む。前記情報取得部は、前記情報提示部から読取範囲内となったときに前記情報提示部から前記情報を取得可能である。前記自動走行車は、前記情報取得部が取得した前記情報に基づいて、前記第1軌道を読み取って前記第1軌道に沿って走行する状態から、前記第2軌道を読み取って前記第2軌道に沿って走行する状態に切り替わる。
【図面の簡単な説明】
【0007】
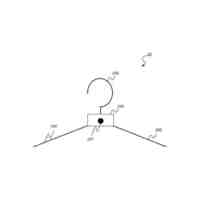
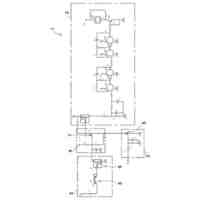
図1は、実施形態に係る自動走行車の運行システムを例示する模式的平面図である。
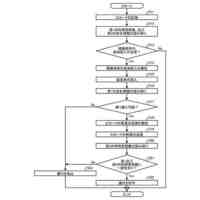
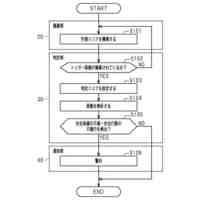
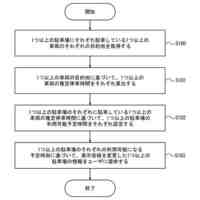
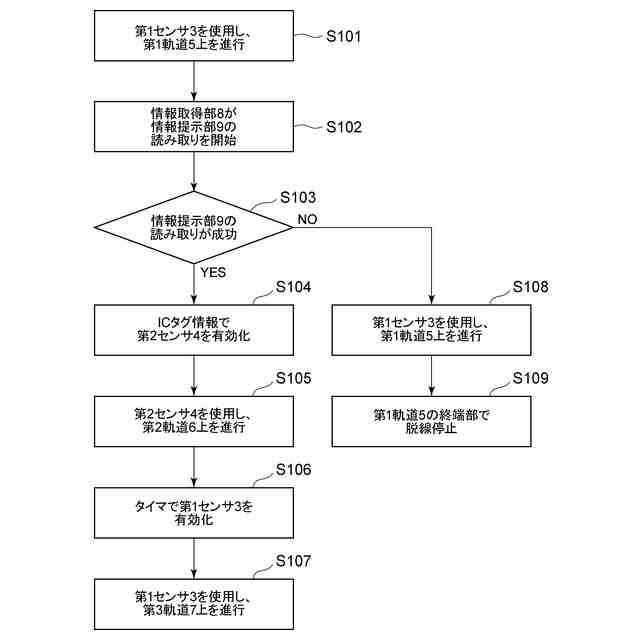
図2は、実施形態に係る運行システムの自動走行車の動作を例示するフローチャートである。
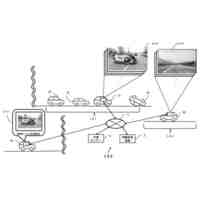
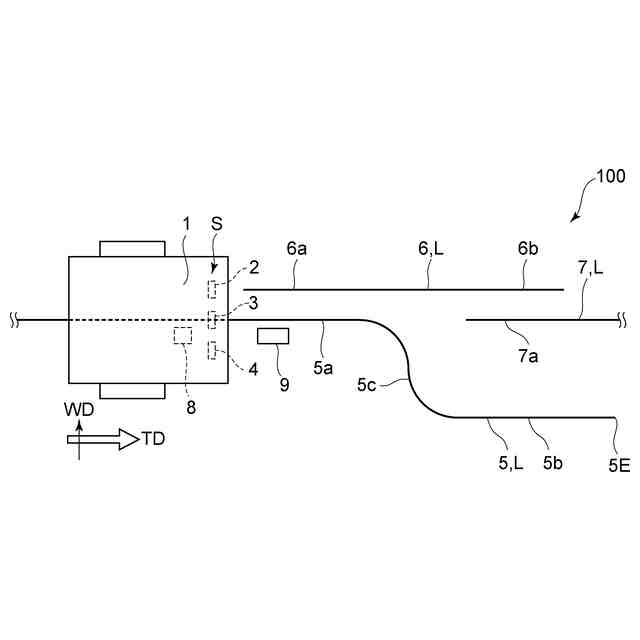
図3は、実施形態に係る運行システムの一部を例示する模式的平面図である。
図4は、実施形態に係る運行システムの別の例を表す模式的平面図である。
【発明を実施するための形態】
【0008】
以下に、本発明の各実施の形態について図面を参照しつつ説明する。
図面は模式的または概念的なものであり、各部分の厚さと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。
本願明細書と各図において、既出の図に関して前述したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0009】
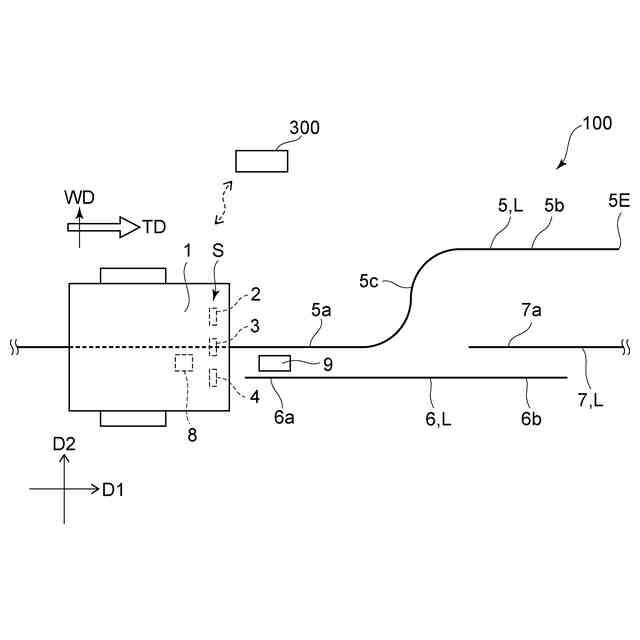
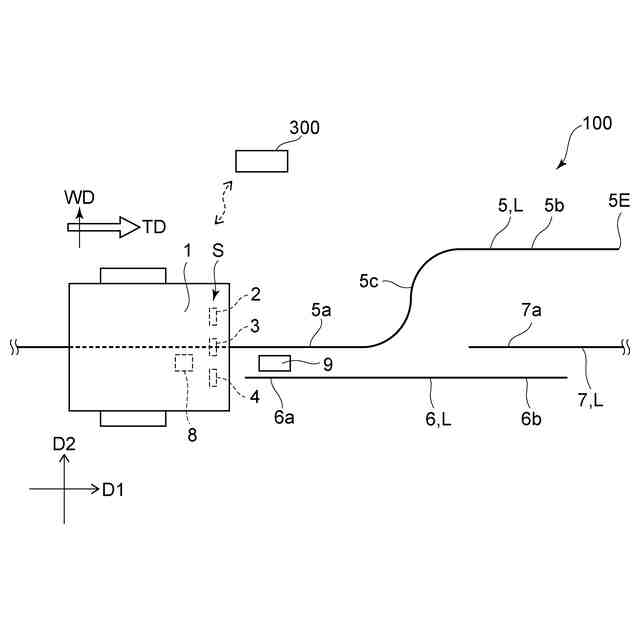
図1は、実施形態に係る自動走行車の運行システムを例示する模式的平面図である。
図1に表したように、実施形態に係る運行システム100は、自動走行車1と、複数の軌道Lと、情報提示部9とを含む。
【0010】
複数の軌道Lは、例えば工場などの建物の床などに予め敷設されたラインである。自動走行車1は、複数の軌道Lの位置をセンサで読み取り、複数の軌道Lのうち読み取った軌道Lに沿って自動走行する。自動走行車1は、例えば無人で資材等を搬送可能な無人搬送車である。なお、自動走行車とは、必要に応じてオペレータが走行を制御できるものであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
紙葉類処理システム
今日
株式会社東芝
改札装置、及び改札方法
今日
株式会社東芝
情報管理装置および検査システム
今日
株式会社東芝
センサヘッド、配管検査装置、および配管検査方法
今日
株式会社東芝
自動改札システム、自動改札機、サーバ装置、自動改札方法及び自動改札プログラム
今日
個人
黄色点滅式信号機
1か月前
個人
空飛ぶ自動車の空路
1か月前
個人
忘れ物検出装置
20日前
個人
出会い頭事故防止装置
17日前
株式会社島津製作所
警報装置
24日前
日本信号株式会社
情報管理システム
17日前
ホーチキ株式会社
監視システム
5日前
タック株式会社
安全監視システム
3日前
株式会社JVCケンウッド
通知システム
3日前
株式会社SUBARU
車速制御システム
20日前
合同会社ORIC-LAB
太陽光発電管理装置
26日前
日本信号株式会社
路側装置及びセンサ装置
6日前
本田技研工業株式会社
路面評価装置
25日前
本田技研工業株式会社
路面評価装置
25日前
株式会社デンソー
運転支援装置
11日前
河村電器産業株式会社
警報装置
19日前
株式会社知財事業研究所
運行計画作成システム
25日前
トヨタ自動車株式会社
方法
10日前
株式会社 ミックウェア
情報処理装置、情報処理方法
17日前
エムケー精工株式会社
信号機および信号機の発光制御方法
11日前
日本宅配システム株式會社
入館管理システム
1か月前
トヨタ自動車株式会社
システム
1か月前
本田技研工業株式会社
運転支援システム
25日前
トヨタ自動車株式会社
異常判定装置
24日前
個人
除排雪判断支援システムおよびプログラム、道路管理方法
3日前
日立Astemo株式会社
車載物体認識装置
1か月前
三菱電機株式会社
車両システム
24日前
トヨタ自動車株式会社
自動運転車両
24日前
トヨタ自動車株式会社
情報処理装置
5日前
能美防災株式会社
音響装置及びその設置構造
21日前
三菱電機株式会社
車両制御装置
14日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ