TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044299
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2024187818,2023151652
出願日
2024-10-24,2023-09-19
発明の名称
作業支援システム、作業支援方法、及び作業支援プログラム
出願人
西武建設株式会社
,
学校法人東京理科大学
,
国立研究開発法人建築研究所
代理人
弁理士法人みなとみらい特許事務所
主分類
B66D
1/50 20060101AFI20250325BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】
複数のガイドワイヤーを適切に制御することによって、移動体による作業を支援する新たな技術を提供する。
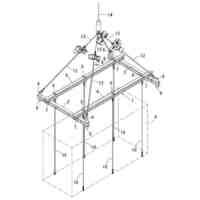
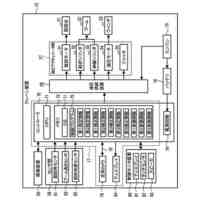
【解決手段】
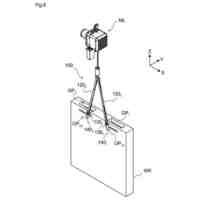
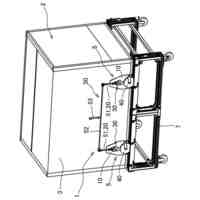
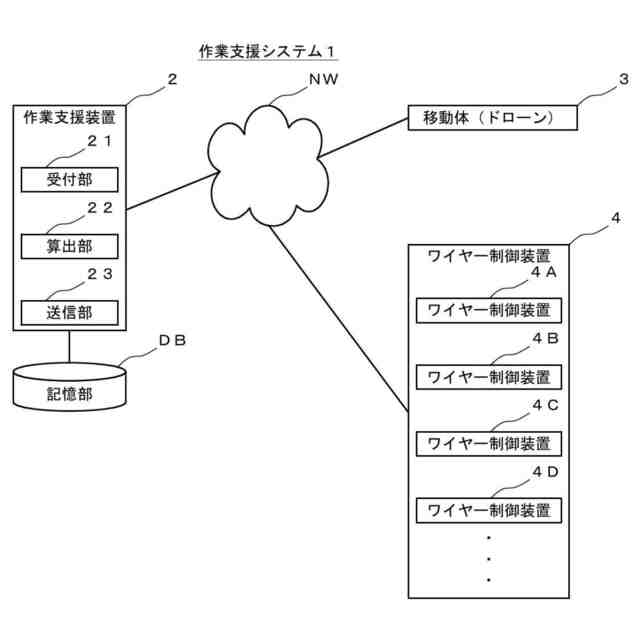
作業支援システムは、記憶部DB、受付部21、算出部22、送信部23、を備える。記憶部DBは、ガイドワイヤーを制御するワイヤー制御装置4の位置情報を格納する。ワイヤー制御装置4は、ガイドワイヤーの巻き取り及び/又は送り出しを行うことによって、複数のガイドワイヤーを制御する。受付部21は、複数のガイドワイヤーに支持される移動体3の位置情報を受け付ける。算出部22は、ワイヤー制御装置4の位置情報、及び、移動体3の位置情報、を用いて、ワイヤー制御装置4と移動体3との距離を算出することによって、移動体3を支持する複数のガイドワイヤーの巻き取り量及び/又は送り出し量を算出する。送信部23は、前記巻き取り量及び/又は送り出し量をワイヤー制御装置4に送信する。
【選択図】図1
特許請求の範囲
【請求項1】
作業現場において移動体を支持する作業支援システムであって、
前記作業支援システムは、記憶部と、受付部と、算出部と、送信部と、を備え、
前記記憶部は、ガイドワイヤーを制御するワイヤー制御装置の位置情報を格納し、
前記ワイヤー制御装置は、前記ガイドワイヤーの巻き取り及び/又は送り出しを行うことによって、複数のガイドワイヤーを制御し、
前記受付部は、前記複数のガイドワイヤーに支持される移動体の位置情報を受け付け、
前記算出部は、前記ワイヤー制御装置の位置情報、及び、前記移動体の位置情報、を用いて、前記ワイヤー制御装置と前記移動体との距離を算出することによって、前記移動体を支持する複数のガイドワイヤーの巻き取り量及び/又は送り出し量を算出し、更に、前記移動体が実行している作業の情報である作業情報を用いて、前記移動体を支持するガイドワイヤーにかける実行作業張力を算出し、
前記送信部は、前記巻き取り量及び/又は送り出し量を前記ワイヤー制御装置に送信し、更に、前記実行作業張力を前記ワイヤー制御装置に送信する、
作業支援システム。
続きを表示(約 1,800 文字)
【請求項2】
前記ワイヤー制御装置は、第1ワイヤー制御装置、及び、第2ワイヤー制御装置、を含み、
前記受付部は、更に、前記第1ワイヤー制御装置から前記ガイドワイヤーの送り出し量を受け付け、
前記算出部は、更に、前記第1ワイヤー制御装置から受け付けた送り出し量を用いて、前記第2ワイヤー制御装置の巻き取り量を算出し、
前記送信部は、更に、前記巻き取り量を前記第2ワイヤー制御装置に送信する、
請求項1に記載の作業支援システム。
【請求項3】
前記算出部は、更に、前記移動体と前記ガイドワイヤーが接触する接触点、及び、前記移動体の重心点、を用いて、前記距離を算出する、
請求項1に記載の作業支援システム。
【請求項4】
前記算出部は、更に、前記ガイドワイヤーの長さ、太さ、及び、前記ガイドワイヤーにかかる風速、を用いて、前記ガイドワイヤーにかかる風荷重を算出し、更に、前記風荷重を用いて、前記ガイドワイヤーにかける張力を算出し、
前記送信部は、更に、前記ガイドワイヤーにかける張力を前記ワイヤー制御装置に送信する、
請求項1に記載の作業支援システム。
【請求項5】
前記ワイヤー制御装置は、前記移動体が移動可能な範囲よりも上方に設置される上方ワイヤー制御装置、を含む、
請求項1に記載の作業支援システム。
【請求項6】
前記送信部は、更に、前記移動体から通信が途絶えた場合、前記移動体の位置を固定するための前記ガイドワイヤーにかける緊急固定張力を前記ワイヤー制御装置に送信する、
請求項1に記載の作業支援システム。
【請求項7】
前記記憶部は、更に、前記ワイヤー制御装置のガイドワイヤーの巻き取り量及び/又は送り出し量の限界、又は、前記ガイドワイヤーの長さの限界、を格納し、
前記算出部は、更に、前記限界を用いて、前記巻き取り量及び/又は送り出し量を算出する、
請求項1に記載の作業支援システム。
【請求項8】
作業現場において移動体を支持する作業支援システムが実行する作業支援方法であって、
ガイドワイヤーの巻き取り及び/又は送り出しを行うことによって、複数のガイドワイヤーを制御するワイヤー制御装置の位置情報を格納する記憶工程と、
前記複数のガイドワイヤーに支持される移動体の位置情報を受け付ける受付工程と、
前記ワイヤー制御装置の位置情報、及び、前記移動体の位置情報、を用いて、前記ワイヤー制御装置と前記移動体との距離を算出することによって、前記移動体を支持する複数のガイドワイヤーの巻き取り量及び/又は送り出し量を算出し、更に、前記移動体が実行している作業の情報である作業情報を用いて、前記移動体を支持するガイドワイヤーにかける実行作業張力を算出する算出工程と、
前記巻き取り量及び/又は送り出し量を前記ワイヤー制御装置に送信し、更に、前記実行作業張力を前記ワイヤー制御装置に送信する送信工程と、をコンピュータが実行する、
作業支援方法。
【請求項9】
作業現場において移動体を支持する作業支援プログラムであって、
記憶部を有するコンピュータを、受付部と、算出部と、送信部と、として機能させ、
前記記憶部は、ガイドワイヤーを制御するワイヤー制御装置の位置情報を格納し、
前記ワイヤー制御装置は、前記ガイドワイヤーの巻き取り及び/又は送り出しを行うことによって、複数のガイドワイヤーを制御し、
前記受付部は、前記複数のガイドワイヤーに支持される移動体の位置情報を受け付け、
前記算出部は、前記ワイヤー制御装置の位置情報、及び、前記移動体の位置情報、を用いて、前記ワイヤー制御装置と前記移動体との距離を算出することによって、前記移動体を支持する複数のガイドワイヤーの巻き取り量及び/又は送り出し量を算出し、更に、前記移動体が実行している作業の情報である作業情報を用いて、前記移動体を支持するガイドワイヤーにかける実行作業張力を算出し、
前記送信部は、前記巻き取り量及び/又は送り出し量を前記ワイヤー制御装置に送信し、更に、前記実行作業張力を前記ワイヤー制御装置に送信する、
作業支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業支援システム、作業支援方法、及び作業支援プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、無人飛行体にケーブルを接続し、無人飛行体の飛行を安定させつつ構造物の点検を行う技術が存在する。
【0003】
例えば特許文献1には、1本のケーブルが接続された無人飛行体を制御する技術が開示されている。また、特許文献1には、無人飛行体の飛行位置を利用してケーブルを制御する技術も開示されている。
【先行技術文献】
【特許文献】
【0004】
特許6790932号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
現在無人飛行体を含む移動体による作業をより安定させる技術の開発が進められている。移動体による作業をより安定させるには、複数のケーブルに接続させる必要がある。しかしながら特許文献1の技術では、接続された1本のケーブルを制御することはできる一方、相互の関係が複雑な複数のケーブルを制御することは困難である。
【0006】
本発明は、上述したような事情に鑑みてなされたものであって、複数のケーブルを適切に制御することによって、移動体による作業を支援する新たな技術を提供することを解決すべき課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、作業現場において移動体を支持する作業支援システムであって、
前記作業支援システムは、記憶部と、受付部と、算出部と、送信部と、を備え、
前記記憶部は、ガイドワイヤーを制御するワイヤー制御装置の位置情報を格納し、
前記ワイヤー制御装置は、前記ガイドワイヤーの巻き取り及び/又は送り出しを行うことによって、複数のガイドワイヤーを制御し、
前記受付部は、前記複数のガイドワイヤーに支持される移動体の位置情報を受け付け、
前記算出部は、前記ワイヤー制御装置の位置情報、及び、前記移動体の位置情報、を用いて、前記ワイヤー制御装置と前記移動体との距離を算出することによって、前記移動体を支持する複数のガイドワイヤーの巻き取り量及び/又は送り出し量を算出し、
前記送信部は、前記巻き取り量及び/又は送り出し量を前記ワイヤー制御装置に送信する。
【0008】
また、本発明は、作業現場において移動体を支持する作業支援システムが実行する作業支援方法であって、
ガイドワイヤーの巻き取り及び/又は送り出しを行うことによって、複数のガイドワイヤーを制御するワイヤー制御装置の位置情報を格納する記憶工程と、
前記複数のガイドワイヤーに支持される移動体の位置情報を受け付ける受付工程と、
前記ワイヤー制御装置の位置情報、及び、前記移動体の位置情報、を用いて、前記ワイヤー制御装置と前記移動体との距離を算出することによって、前記移動体を支持する複数のガイドワイヤーの巻き取り量及び/又は送り出し量を算出する算出工程と、
前記巻き取り量及び/又は送り出し量を前記ワイヤー制御装置に送信する送信工程と、をコンピュータが実行する。
【0009】
また、本発明は、作業現場において移動体を支持する作業支援プログラムであって、
記憶部を有するコンピュータを、受付部と、算出部と、送信部と、として機能させ、
前記記憶部は、ガイドワイヤーを制御するワイヤー制御装置の位置情報を格納し、
前記ワイヤー制御装置は、前記ガイドワイヤーの巻き取り及び/又は送り出しを行うことによって、複数のガイドワイヤーを制御し、
前記受付部は、前記複数のガイドワイヤーに支持される移動体の位置情報を受け付け、
前記算出部は、前記ワイヤー制御装置の位置情報、及び、前記移動体の位置情報、を用いて、前記ワイヤー制御装置と前記移動体との距離を算出することによって、前記移動体を支持する複数のガイドワイヤーの巻き取り量及び/又は送り出し量を算出し、
前記送信部は、前記巻き取り量及び/又は送り出し量を前記ワイヤー制御装置に送信する。
【0010】
このような構成とすることで、移動体の位置情報を用いて複数のガイドワイヤーを制御することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
西武建設株式会社
作業支援システム、作業支援方法、及び作業支援プログラム
26日前
個人
懸吊装置
7か月前
ユニパルス株式会社
吊具
10か月前
個人
海上コンテナ昇降装置
4か月前
ユニパルス株式会社
吊具装置
5か月前
ユニパルス株式会社
荷役装置
3か月前
株式会社豊田自動織機
荷役車両
4か月前
水戸工業株式会社
吊り具
20日前
株式会社豊田自動織機
荷役車両
3か月前
株式会社豊田自動織機
産業車両
5か月前
株式会社豊田自動織機
荷役車両
9か月前
白山工業株式会社
バランサ
1か月前
株式会社日本キャリア工業
昇降機
8か月前
ユニパルス株式会社
荷役助力装置
12か月前
個人
建築部材の吊り上げ装置
6か月前
株式会社ユピテル
システム等
17日前
株式会社ニシキ
可変型吊り天秤
11か月前
フジテック株式会社
エレベータ
3か月前
株式会社豊田自動織機
フォークリフト
9か月前
株式会社大林組
養生方法
7か月前
株式会社豊田自動織機
フォークリフト
2か月前
株式会社キトー
吊具
7か月前
白山工業株式会社
腕重量補償機構
6か月前
有限会社サエキ
玉掛用器具
4か月前
ウエダ産業株式会社
鋼板保持装置
8か月前
株式会社タダノ
高所作業車
6か月前
ブラザー工業株式会社
架台
10か月前
小野谷機工株式会社
ジャッキ装置
9か月前
ブラザー工業株式会社
架台
10か月前
フジテック株式会社
エスカレータ
18日前
株式会社タダノ
クレーン装置
3か月前
株式会社大林組
作業システム
7か月前
株式会社タダノ
クレーン装置
10か月前
株式会社慧泉
搬送装置
9か月前
ダイハツ工業株式会社
荷箱移動装置
11か月前
株式会社スギヤス
車両整備用リフト
4か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ