TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025043105
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150430
出願日
2023-09-15
発明の名称
自律走行車管理システム、自律走行車管理方法、及びプログラム
出願人
TIS株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250321BHJP(制御;調整)
要約
【課題】自律走行車がエレベータに円滑に乗降することを可能とすることを目的とする。
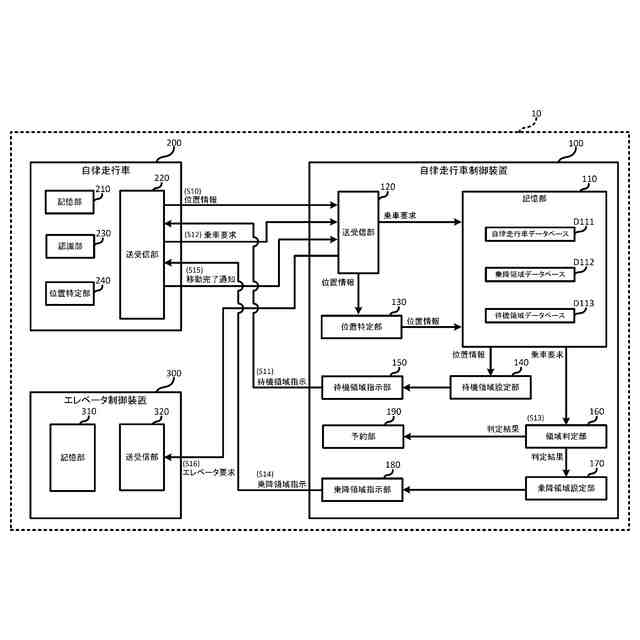
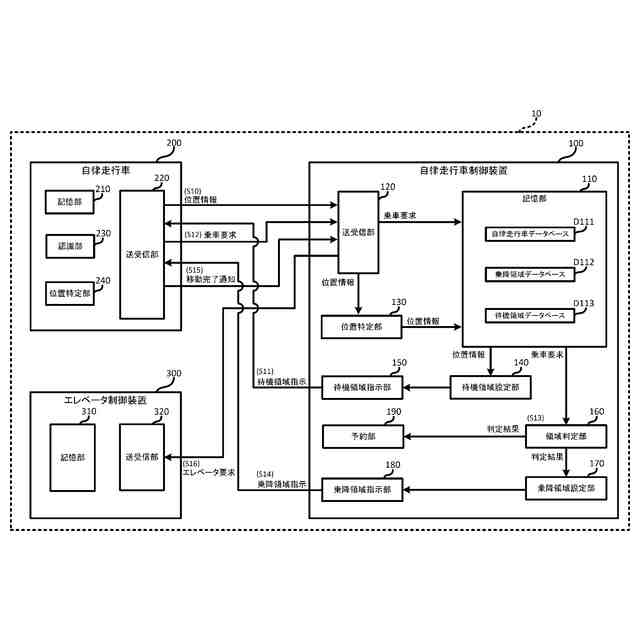
【解決手段】自律走行車がエレベータに乗り降りする際に経由する建物内の各階における乗降領域を、経由可能か否かを示す第1のデータベースと、所定のエレベータによって第1の階から第2の階に第1の自律走行車が移動する場合、所定のエレベータに対応する第1の乗降領域、および所定のエレベータに対応する第2の乗降領域を、第1の自律走行車が経由可能か否かを判定する領域判定部と、第1および第2の乗降領域を第1の自律走行車が経由可能である場合、第1および第2の乗降領域を第2の自律走行車が経由不可となるように第1のデータベースを設定する乗降領域設定部と、第1および第2の乗降領域を第1の自律走行車が経由可能である場合、第1の自律走行車を第1の乗降領域に移動させるための乗降領域指示を第1の自律走行車に送信する乗降領域指示部と、を備える。
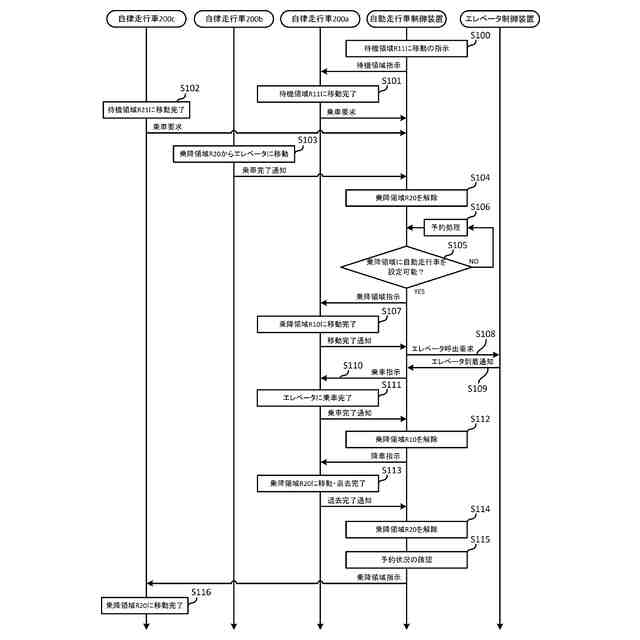
【選択図】図1
特許請求の範囲
【請求項1】
自律走行車がエレベータに乗り降りする際に自律走行車が経由する領域である、建物内の一つ以上のエレベータのそれぞれに対応する、建物内の各階における乗降領域を、自律走行車が経由可能か否かを示す第1のデータベースを含む記憶部と、
前記一つ以上のエレベータのうちの所定のエレベータによって第1の階から前記第1の階とは異なる第2の階に第1の自律走行車が移動する場合、前記所定のエレベータに対応する前記第1の階における前記乗降領域である第1の乗降領域、および前記所定のエレベータに対応する前記第2の階における前記乗降領域である第2の乗降領域を、前記第1の自律走行車が経由可能か否かを前記第1のデータベースに基づき判定する領域判定部と、
前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車とは異なる第2の自律走行車が経由不可となるように前記第1のデータベースを設定する乗降領域設定部と、
前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の自律走行車を前記第1の乗降領域に移動させるための乗降領域指示を前記第1の自律走行車に送信する乗降領域指示部と、
を備える自律走行車管理システム。
続きを表示(約 2,600 文字)
【請求項2】
前記乗降領域設定部は、
前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、
前記所定のエレベータから前記第1の自律走行車が降車後に経由する前記第1の乗降領域または前記第2の乗降領域に前記第1の自律走行車が移動完了した場合、前記第1の自律走行車が到達した前記第1の乗降領域または前記第2の乗降領域を前記第2の自律走行車が経可能となるように前記第1のデータベースを設定する、
請求項1に記載の自律走行車管理システム。
【請求項3】
前記乗降領域設定部は、
前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、
前記所定のエレベータに乗車するために前記第1の自律走行車が経由する前記第1の乗降領域または前記第2の乗降領域から、前記所定のエレベータ内に前記第1の自律走行車が移動完了した場合、前記所定のエレベータに乗車するために前記第1の自律走行車が経由した前記第1の乗降領域または前記第2の乗降領域を前記第2の自律走行車が経由可能となるように前記第1のデータベースを設定する、
請求項1に記載の自律走行車管理システム。
【請求項4】
前記記憶部は、自律走行車がエレベータに乗り降りする際に自律走行車が待機する領域であって、前記乗降領域の近傍の領域である待機領域を自律走行車に設定可能であるか否かを示す第2のデータベースを含み、
前記自律走行車管理システムは、
第1の階から前記第2の階に前記所定のエレベータで第1の自律走行車を移動させる場合、前記第2のデータベースにおいて前記第1の自律走行車に設定される、前記第1の乗降領域の近傍の前記待機領域に、前記第1の自律走行車を移動させるための待機領域指示を前記第1の自律走行車に送信する待機領域指示部をさらに備える、
請求項1に記載の自律走行車管理システム。
【請求項5】
前記第1の乗降領域の近傍の前記待機領域に前記第1の自律走行車が移動した場合、前記第1の自律走行車から、前記所定のエレベータに前記第1の自律走行車を乗車させるための乗車要求を取得する取得部をさらに備え、
前記領域判定部は、前記乗車要求が取得された場合、第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能であるか否かを、前記第1のデータベースに基づき判定する、
請求項4に記載の自律走行車管理システム。
【請求項6】
前記乗降領域指示部は、前記第1の乗降領域の近傍の領域である前記待機領域に前記待機領域指示に応じて前記第1の自律走行車が待機している状態において、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能に前記第1のデータベースに設定されていない場合、前記乗降領域指示を前記第1の自律走行車に送信する、
請求項4に記載の自律走行車管理システム。
【請求項7】
前記領域判定部において前記記第1の乗降領域および前記第2の乗降領域のうちの少なくともいずれかを前記第1の自律走行車が経由不可であると判定された場合、前記第1の乗降領域および前記第2の乗降領域のうちの少なくともいずれかを自律走行車に設定する順位を前記第1の自律走行車に設定する予約部をさらに備える、
請求項1に記載の自律走行車管理システム。
【請求項8】
自律走行車がエレベータに乗り降りする際に自律走行車が経由する領域である、建物内の一つ以上のエレベータのそれぞれに対応する、前記建物内の各階における乗降領域を、自律走行車が経由可能か否かを示す第1のデータベースを有するコンピュータが、
前記一つ以上のエレベータのうちの所定のエレベータによって第1の階から前記第1の階とは異なる第2の階に第1の自律走行車が移動する場合、前記所定のエレベータに対応する前記第1の階における前記乗降領域である第1の乗降領域、および前記所定のエレベータに対応する前記第2の階における前記乗降領域である第2の乗降領域を、前記第1の自律走行車が経由可能か否かを前記第1のデータベースに基づき判定することと、
前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車とは異なる第2の自律走行車が経由不可となるように前記第1のデータベースを設定することと、
前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の自律走行車を前記第1の乗降領域に移動させるための乗降領域指示を前記第1の自律走行車に送信することと、
を実行する自律走行車管理方法。
【請求項9】
自律走行車がエレベータに乗り降りする際に自律走行車が経由する領域である、建物内の一つ以上のエレベータのそれぞれに対応する、前記建物内の各階における乗降領域を、自律走行車が経由可能か否かを示す第1のデータベースを有するコンピュータに、
前記一つ以上のエレベータのうちの所定のエレベータによって第1の階から前記第1の階とは異なる第2の階に第1の自律走行車が移動する場合、前記所定のエレベータに対応する前記第1の階における前記乗降領域である第1の乗降領域、および前記所定のエレベータに対応する前記第2の階における前記乗降領域である第2の乗降領域を、前記第1の自律走行車が経由可能か否かを前記第1のデータベースに基づき判定することと、
前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車とは異なる第2の自律走行車が経由不可となるように前記第1のデータベースを設定することと、
前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の自律走行車を前記第1の乗降領域に移動させるための乗降領域指示を前記第1の自律走行車に送信することと、
を実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行車管理システム、自律走行車管理方法、及びプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
ロボットをエレベータに乗車させるときにロボットを待機させる待機位置を用いてロボットを円滑に移動させる情報処理装置が開示されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第7278467号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の情報処理装置は、エレベータに乗車するロボットが待機する位置として定められた待機位置のうち、当該ロボットを待機させることが可能な待機位置を決定する。当該情報処理装置は、決定された待機位置にロボットを移動させる。そして、ロボットにはエレベータへ乗車する優先度が設定されている。当該情報処理装置では、所定のロボットに対して複数の待機位置のうち待機可能な待機位置を決定できない場合、所定のロボットの優先度よりも低い優先度が設定されているロボットに決定された待機位置を、所定のロボットの待機位置として設定する。これにより、特許文献1に記載の情報処理装置は、ロボットを優先度に応じて円滑にエレベータに乗車させることができる。
【0005】
しかしながら、特許文献1に記載の情報処理装置では、エレベータから降車する際の自律走行車の移動ルートと、当該エレベータに乗車する際の他の自律走行車の移動ルートとが重なることにより、それぞれの自律走行車の移動が妨げられるという問題が生じる。
【0006】
そこで、本発明は、上記の課題に鑑みて、自律走行車がエレベータに円滑に乗降することを可能とすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様に係る自律走行車管理システムは、自律走行車がエレベータに乗り降りする際に自律走行車が経由する領域である、建物内の一つ以上のエレベータのそれぞれに対応する、前記建物内の各階における乗降領域を、自律走行車が経由可能か否かを示す第1のデータベースを含む記憶部と、前記一つ以上のエレベータのうちの所定のエレベータによって第1の階から前記第1の階とは異なる第2の階に第1の自律走行車が移動する場合、前記所定のエレベータに対応する前記第1の階における前記乗降領域である第1の乗降領域、および前記所定のエレベータに対応する前記第2の階における前記乗降領域である第2の乗降領域を、前記第1の自律走行車が経由可能か否かを前記第1のデータベースに基づき判定する領域判定部と、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車とは異なる第2の自律走行車が経由不可となるように前記第1のデータベースを設定する乗降領域設定部と、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の自律走行車を前記第1の乗降領域に移動させるための乗降領域指示を前記第1の自律走行車に送信する前記乗降領域指示部と、を備える。
【0008】
本発明の一態様に係る自律走行車管理方法は、自律走行車がエレベータに乗り降りする際に自律走行車が経由する領域である、建物内の一つ以上のエレベータのそれぞれに対応する、前記建物内の各階における乗降領域を、自律走行車が経由可能か否かを示す第1のデータベースを有するコンピュータが、前記一つ以上のエレベータのうちの所定のエレベータによって第1の階から前記第1の階とは異なる第2の階に第1の自律走行車が移動する場合、前記所定のエレベータに対応する前記第1の階における前記乗降領域である第1の乗降領域、および前記所定のエレベータに対応する前記第2の階における前記乗降領域である第2の乗降領域を、前記第1の自律走行車が経由可能か否かを前記第1のデータベースに基づき判定することと、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車とは異なる第2の自律走行車が経由不可となるように前記第1のデータベースを設定することと、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の自律走行車を前記第1の乗降領域に移動させるための乗降領域指示を前記第1の自律走行車に送信することと、を実行する。
【0009】
本発明の一態様に係るプログラムは、自律走行車がエレベータに乗り降りする際に自律走行車が経由する領域である、建物内の一つ以上のエレベータのそれぞれに対応する、前記建物内の各階における乗降領域を、自律走行車が経由可能か否かを示す第1のデータベースを有するコンピュータに、前記一つ以上のエレベータのうちの所定のエレベータによって第1の階から前記第1の階とは異なる第2の階に第1の自律走行車が移動する場合、前記所定のエレベータに対応する前記第1の階における前記乗降領域である第1の乗降領域、および前記所定のエレベータに対応する前記第2の階における前記乗降領域である第2の乗降領域を、前記第1の自律走行車が経由可能か否かを前記第1のデータベースに基づき判定することと、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車とは異なる第2の自律走行車が経由不可となるように前記第1のデータベースを設定することと、前記第1の乗降領域および前記第2の乗降領域を前記第1の自律走行車が経由可能である場合、前記第1の自律走行車を前記第1の乗降領域に移動させるための乗降領域指示を前記第1の自律走行車に送信することと、を実行させる。
【発明の効果】
【0010】
本発明によれば、自律走行車がエレベータに円滑に乗降することが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
TIS株式会社
プログラムおよび情報処理装置
21日前
TIS株式会社
情報処理装置、情報処理方法および情報処理プログラム
今日
TIS株式会社
自律走行車管理システム、自律走行車管理方法、及びプログラム
6日前
個人
無人作業システム
2か月前
アズビル株式会社
制御装置
1か月前
村田機械株式会社
産業機械
2か月前
コフロック株式会社
流量制御装置
1か月前
和研工業株式会社
多連レバー機構
6日前
トヨタ自動車株式会社
自律移動体
2か月前
株式会社クボタ
作業車
2か月前
スター精密株式会社
工作機械
22日前
株式会社丸和製作所
入力機器
1か月前
株式会社豊田自動織機
荷役車両
1か月前
株式会社明電舎
車両
2か月前
株式会社フジキン
流量制御装置
1か月前
ローム株式会社
半導体集積回路
1日前
トヨタ自動車株式会社
ロボットシステム
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社シンテックホズミ
搬送ロボット
1か月前
トヨタ自動車株式会社
ロボットシステム
2か月前
株式会社村田製作所
温度補償回路
2か月前
株式会社ダイフク
物品搬送設備
2か月前
キヤノン株式会社
情報処理装置
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
国立大学法人広島大学
モデル誤差抑制補償器
27日前
株式会社ダイフク
物品搬送設備
2か月前
愛知機械テクノシステム株式会社
無人搬送車
15日前
旭精機工業株式会社
監視データ処理装置
2か月前
アズビル株式会社
制御システムおよび制御方法
16日前
アズビル株式会社
制御システムおよび制御方法
7日前
アズビル株式会社
制御システムおよび制御方法
7日前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
日本精工株式会社
制御装置および制御方法
13日前
トヨタ自動車株式会社
自律走行装置
27日前
ブラザー工業株式会社
数値制御装置及び工作機械
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ