TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042784
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023149921
出願日
2023-09-15
発明の名称
障害物監視システム、障害物監視装置、障害物監視方法、及び、プログラム
出願人
日本電気株式会社
代理人
個人
主分類
B61L
23/00 20060101AFI20250321BHJP(鉄道)
要約
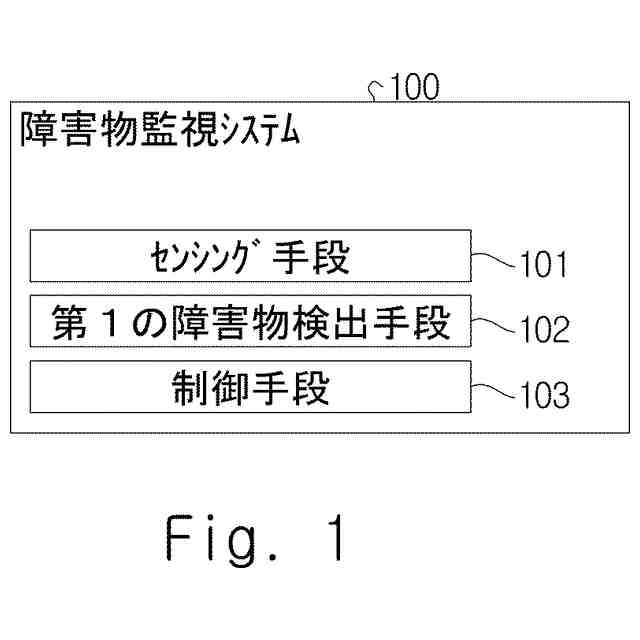
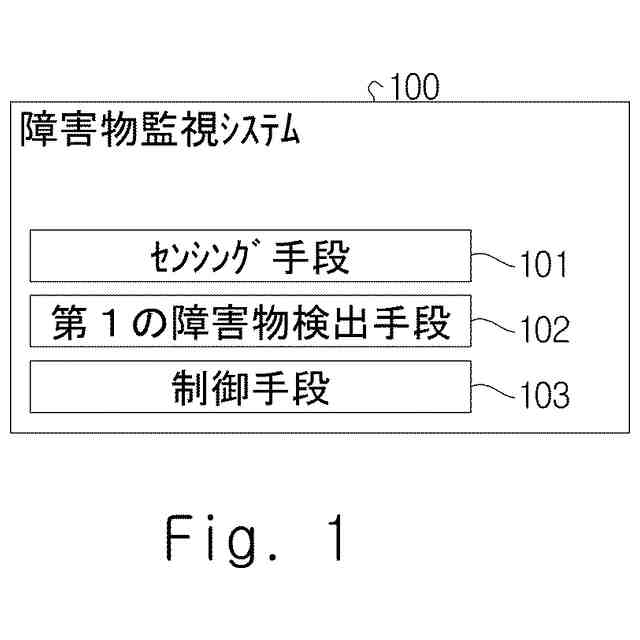
【課題】移動体に搭載したセンシング手段のセンシング結果に基づいて当該移動体の進行方向の障害物を検出するに際し、移動体の移動速度を確保しつつ障害物の検出確度を向上する技術を提供する。
【解決手段】障害物監視システムは、センシング手段と、第1の障害物検出手段と、前記移動体の移動速度が第1の移動速度であり、前記センシング手段のセンシング視野角が第1の視野角である第1の制御モードと、前記移動体の移動速度が第2の移動速度であり、前記センシング手段のセンシング視野角が第2の視野角である第2の制御モードと、を含む複数の制御モードを選択的に実行する制御手段と、を含む。前記制御手段は、前記制御手段が前記第1の制御モードを実行しているときに前記第1の障害物検出手段が前記障害物を検出した場合、前記第2の視野角内に前記障害物を捉えるように前記第2の制御モードを実行する。
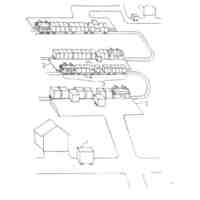
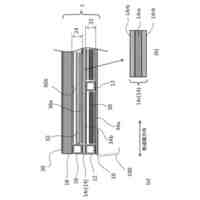
【選択図】図1
特許請求の範囲
【請求項1】
移動体の移動方向における前方をセンシングするセンシング手段と、
前記センシング手段のセンシング結果に基づいて障害物を検出する第1の障害物検出手段と、
前記移動体の移動速度が第1の移動速度であり、前記センシング手段のセンシング視野角が第1の視野角である第1の制御モードと、前記移動体の移動速度が前記第1の移動速度よりも低い第2の移動速度であり、前記センシング手段のセンシング視野角が前記第1の視野角よりも狭い第2の視野角である第2の制御モードと、を含む複数の制御モードを選択的に実行する制御手段と、
を含み、
前記制御手段は、前記制御手段が前記第1の制御モードを実行しているときに前記第1の障害物検出手段が前記障害物を検出した場合、前記第2の視野角内に前記障害物を捉えるように前記第2の制御モードを実行する、
障害物監視システム。
続きを表示(約 1,500 文字)
【請求項2】
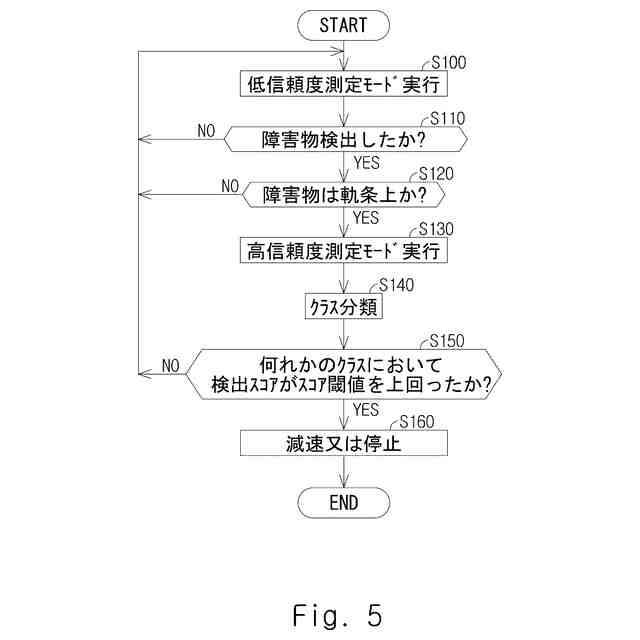
前記制御手段が前記第2の制御モードを実行しているとき、前記センシング手段のセンシング結果を入力し、前記第1の障害物検出手段が検出した前記障害物のクラス毎の検出スコアを出力するニューラルネットワークにより構成された第2の障害物検出手段を更に含む、
請求項1に記載の障害物監視システム。
【請求項3】
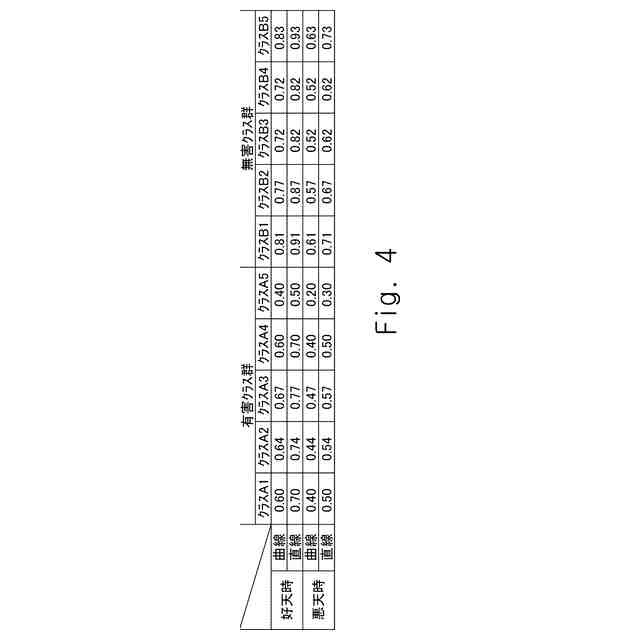
クラス毎にスコア閾値が設定されており、
前記制御手段は、何れかのクラスにおいて、前記検出スコアが前記スコア閾値を上回った場合、前記移動体を減速し又は停止させる、
請求項2に記載の障害物監視システム。
【請求項4】
前記移動体の移動に支障が出るクラスには前記スコア閾値として第1のスコア閾値が設定され、
前記移動体の移動に支障が出ないクラスには前記スコア閾値として前記第1のスコア閾値よりも高い第2のスコア閾値が設定される、
請求項3に記載の障害物監視システム。
【請求項5】
各クラスにおいて、悪天時のスコア閾値は好天時のスコア閾値よりも低く設定される、
請求項3又は4に記載の障害物監視システム。
【請求項6】
各クラスにおいて、前記移動体の現在移動している移動軌道が曲線であるときのスコア閾値は、前記移動軌道が直線であるときのスコア閾値よりも低く設定される、
請求項3又は4に記載の障害物監視システム。
【請求項7】
前記制御手段は、前記第1の障害物検出手段が検出した前記障害物が前記移動体の移動軌道から外れている場合、前記制御モードの切り替えを行わない、
請求項1に記載の障害物監視システム。
【請求項8】
移動体の移動方向における前方をセンシングするセンシング手段と、
前記センシング手段のセンシング結果に基づいて障害物を検出する第1の障害物検出手段と、
前記移動体の移動速度が第1の移動速度であり、前記センシング手段のセンシング視野角が第1の視野角である第1の制御モードと、前記移動体の移動速度が前記第1の移動速度よりも低い第2の移動速度であり、前記センシング手段のセンシング視野角が前記第1の視野角よりも狭い第2の視野角である第2の制御モードと、を含む複数の制御モードを選択的に実行する制御手段と、
を含み、
前記制御手段は、前記制御手段が前記第1の制御モードを実行しているときに前記第1の障害物検出手段が前記障害物を検出した場合、前記第2の視野角内に前記障害物を捉えるように前記第2の制御モードを実行する、
障害物監視装置。
【請求項9】
コンピュータが、
移動体の移動方向における前方をセンシングするセンシング手段のセンシング結果に基づいて障害物を検出し、
前記移動体の移動速度が第1の移動速度であり、前記センシング手段のセンシング視野角が第1の視野角である第1の制御モードと、前記移動体の移動速度が前記第1の移動速度よりも低い第2の移動速度であり、前記センシング手段のセンシング視野角が前記第1の視野角よりも狭い第2の視野角である第2の制御モードと、を含む複数の制御モードを選択的に実行し、
前記第1の制御モードを実行しているときに前記障害物を検出した場合、前記第2の視野角内に前記障害物を捉えるように前記第2の制御モードを実行する、
障害物監視方法。
【請求項10】
コンピュータに、請求項9に記載の障害物監視方法を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、障害物監視システム、障害物監視装置、障害物監視方法、及び、プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1は、車両前方に障害物を検出した場合、自車両の退避スペースを探索し、探索した退避スペースに自車両を誘導して停車させる、車両制御システムを開示している。車両前方の障害物を検出する手段として、ステレオカメラ、Radar(Radio Detection and Ranging)装置及びLiDAR(Light Detection And Ranging)装置を例示している。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/179958号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、移動体に搭載したセンシング手段のセンシング結果に基づいて当該移動体の進行方向の障害物を検出する場合、当該移動体の移動速度と障害物の検出確度はトレードオフの関係にあり、両者を同時に実現することは困難とされている。
【0005】
即ち、移動体を高速で移動させる場合、移動体が障害物を検出してから実際に移動体が障害物に衝突するまでの時間は限られている。このため、障害物を高い確度で検出するには時間が足りない。このため、障害物を誤検出することもあるだろう。障害物を誤検出したことで移動体の移動速度を落とした場合、移動体が目的地に到着する時刻が遅れてしまう。
【0006】
本開示の目的は、移動体に搭載したセンシング手段のセンシング結果に基づいて当該移動体の進行方向の障害物を検出するに際し、移動体の移動速度を確保しつつ障害物の検出確度を向上する技術を提供することにある。
【課題を解決するための手段】
【0007】
移動体の移動方向における前方をセンシングするセンシング手段と、
前記センシング手段のセンシング結果に基づいて障害物を検出する第1の障害物検出手段と、
前記移動体の移動速度が第1の移動速度であり、前記センシング手段のセンシング視野角が第1の視野角である第1の制御モードと、前記移動体の移動速度が前記第1の移動速度よりも低い第2の移動速度であり、前記センシング手段のセンシング視野角が前記第1の視野角よりも狭い第2の視野角である第2の制御モードと、を含む複数の制御モードを選択的に実行する制御手段と、
を含み、
前記制御手段は、前記制御手段が前記第1の制御モードを実行しているときに前記第1の障害物検出手段が前記障害物を検出した場合、前記第2の視野角内に前記障害物を捉えるように前記第2の制御モードを実行する、
障害物監視システムが提供される。
【0008】
移動体の移動方向における前方をセンシングするセンシング手段と、
前記センシング手段のセンシング結果に基づいて障害物を検出する第1の障害物検出手段と、
前記移動体の移動速度が第1の移動速度であり、前記センシング手段のセンシング視野角が第1の視野角である第1の制御モードと、前記移動体の移動速度が前記第1の移動速度よりも低い第2の移動速度であり、前記センシング手段のセンシング視野角が前記第1の視野角よりも狭い第2の視野角である第2の制御モードと、を含む複数の制御モードを選択的に実行する制御手段と、
を含み、
前記制御手段は、前記制御手段が前記第1の制御モードを実行しているときに前記第1の障害物検出手段が前記障害物を検出した場合、前記第2の視野角内に前記障害物を捉えるように前記第2の制御モードを実行する、
障害物監視装置が提供される。
【0009】
コンピュータが、
移動体の移動方向における前方をセンシングするセンシング手段のセンシング結果に基づいて障害物を検出し、
前記移動体の移動速度が第1の移動速度であり、前記センシング手段のセンシング視野角が第1の視野角である第1の制御モードと、前記移動体の移動速度が前記第1の移動速度よりも低い第2の移動速度であり、前記センシング手段のセンシング視野角が前記第1の視野角よりも狭い第2の視野角である第2の制御モードと、を含む複数の制御モードを選択的に実行し、
前記第1の制御モードを実行しているときに前記障害物を検出した場合、前記第2の視野角内に前記障害物を捉えるように前記第2の制御モードを実行する、
障害物監視方法が提供される。
【発明の効果】
【0010】
本開示によれば、移動体に搭載したセンシング手段のセンシング結果に基づいて当該移動体の進行方向の障害物を検出するに際し、移動体の移動速度を確保しつつ障害物の検出確度を向上することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
コンテナ輸送システム
7か月前
日本信号株式会社
検査装置
3か月前
東光産業株式会社
電動台車
9か月前
コイト電工株式会社
座席装置
9か月前
株式会社新陽社
発車標
6か月前
コイト電工株式会社
暖房装置
7か月前
コイト電工株式会社
暖房装置
7か月前
日本信号株式会社
ホーム柵装置
1日前
日本車輌製造株式会社
鉄道車両
7か月前
日本車輌製造株式会社
鉄道車両
7か月前
富士電機株式会社
戸閉装置
10か月前
保線機器整備株式会社
保線用カート
1か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
株式会社ロッソ
移動体案内システム
10か月前
オムロン株式会社
転落検知システム
11か月前
川崎車両株式会社
鉄道車両用パネル
1か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
カヤバ株式会社
鉄道車両用制振装置
3か月前
カヤバ株式会社
鉄道車両用制振装置
7か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
日本信号株式会社
踏切道監視システム
4か月前
日本信号株式会社
ホーム安全システム
2日前
株式会社ダイフク
搬送設備
6か月前
株式会社日立製作所
鉄道車両
10か月前
株式会社京三製作所
地上子
11か月前
ヤマハ発動機株式会社
無人搬送車
1日前
ヤマハ発動機株式会社
無人搬送車
1日前
シャープ株式会社
表示装置
4か月前
ヤマハ発動機株式会社
無人搬送車
1日前
株式会社ダイフク
搬送設備
9か月前
前川鉄工株式会社
ロープ駆動装置
5か月前
ナブテスコ株式会社
ホームドア装置
6か月前
ナブテスコ株式会社
ホームドア装置
5か月前
株式会社フジキカイ
リニア搬送装置
6か月前
ナブテスコ株式会社
ホームドア装置
6か月前
ナブテスコ株式会社
ホームドア装置
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ