TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025049934
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023158457
出願日
2023-09-22
発明の名称
無人搬送車
出願人
ヤマハ発動機株式会社
代理人
個人
,
個人
主分類
B61B
13/00 20060101AFI20250327BHJP(鉄道)
要約
【課題】設備に向かって良好に走行できるとともに、パレットを引き込むモータが設けられていない設備に対して、パレットを良好に受け渡すことができる無人搬送車を提供する。
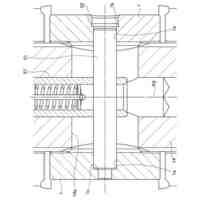
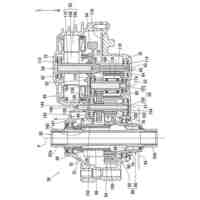
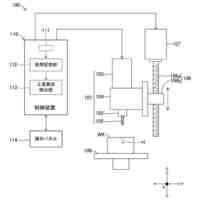
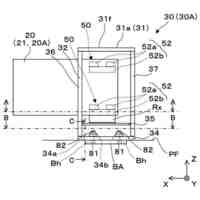
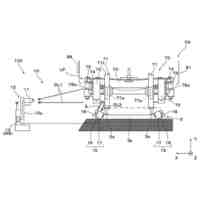
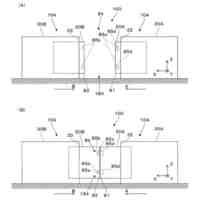
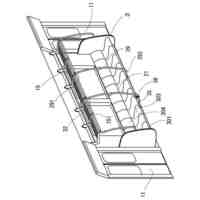
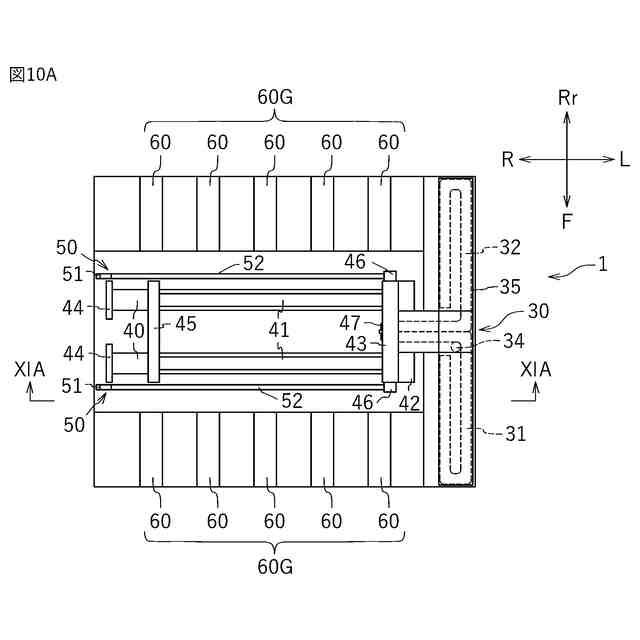
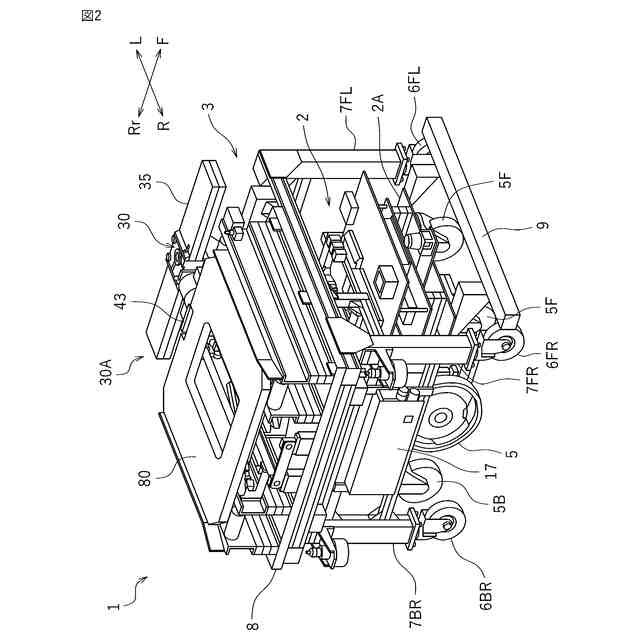
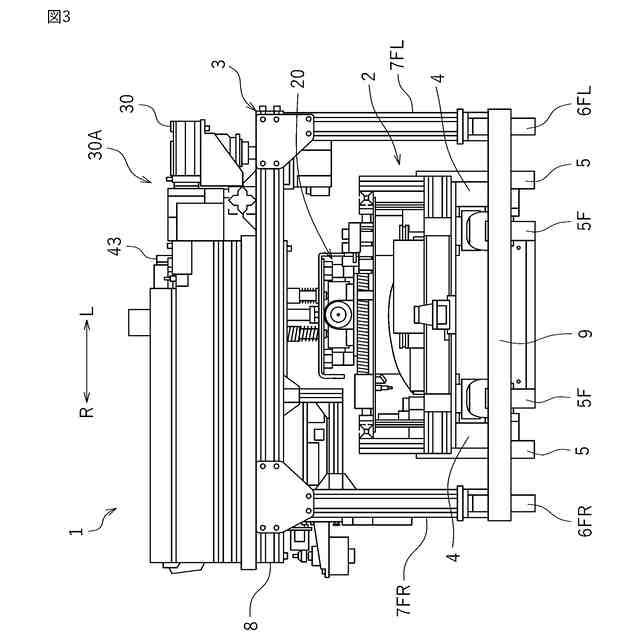
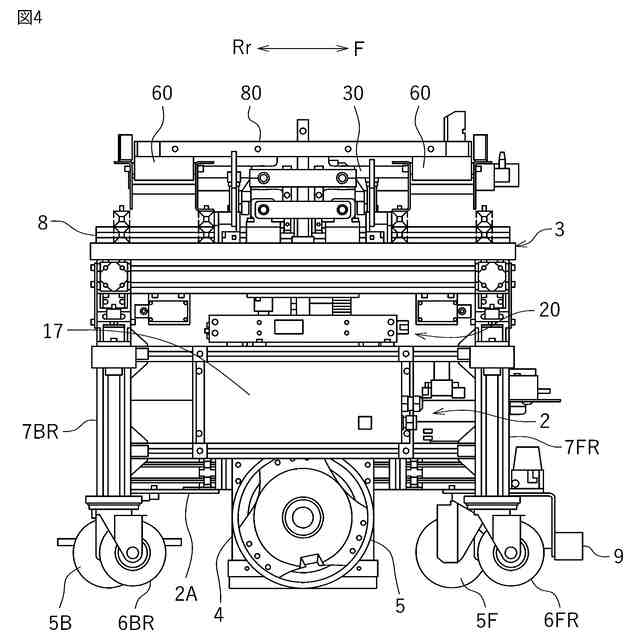
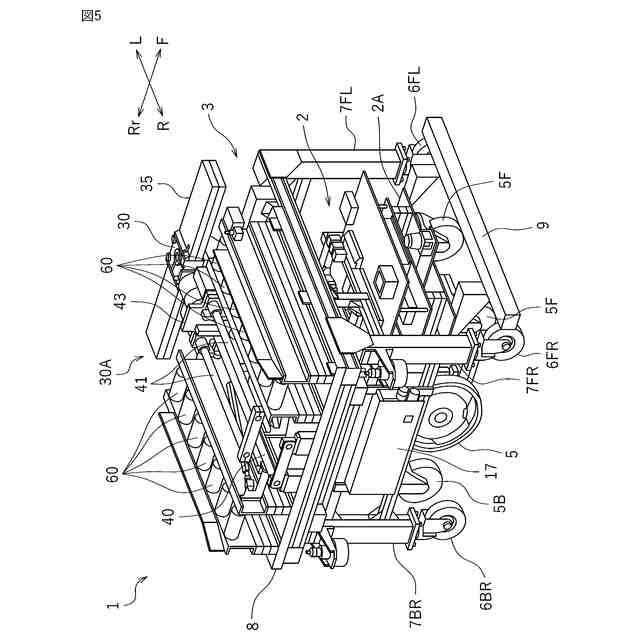
【解決手段】無人搬送車1は噛み合い式チェーン機構30を備えている。噛み合い式チェーン機構30の第1ジップチェーン31および第2ジップチェーン32は、ケース35の内部で巻回されている。第1ジップチェーン31および第2ジップチェーン32の先端部には係合部材47が設けられている。係合部材47はパレットと着脱自在に係合する。モータによって第1ジップチェーン31および第2ジップチェーン32を設備に向かって送り出すことで、無人搬送車1と設備との間でパレットの受け渡しを行う。
【選択図】図10A
特許請求の範囲
【請求項1】
設備に向かって自動的に走行するとともに、前記設備とパレットの受け渡しを行う無人搬送車であって、
駆動力を発生させる走行用駆動源と、前記走行用駆動源の駆動力を受けて回転する駆動輪と、を有する車両本体と、
前記車両本体に支持され、前記パレットが載せられる荷台と、
前記荷台に支持されたケースと、先端部を有しかつ前記ケース内にて巻回された第1および第2のジップチェーンと、前記先端部が前記ケースから離れる方向に前記第1および第2のジップチェーンを送り出し、前記第1および第2のジップチェーンを互いに噛み合わせるモータと、を有する噛み合い式チェーン機構と、
前記第1および第2のジップチェーンの前記先端部に接続され、前記パレットと着脱自在に係合する係合部材と、を備え、
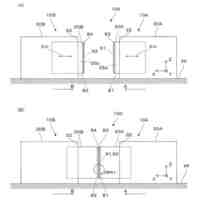
前記噛み合い式チェーン機構は、前記係合部材が車両平面視において前記荷台または前記車両本体と重なる第1位置と、前記係合部材が車両平面視において前記荷台および前記車両本体の外側に位置する第2位置との間で、前記係合部材を移動させるように構成されている、無人搬送車。
続きを表示(約 1,800 文字)
【請求項2】
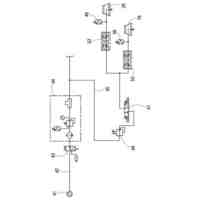
前記走行用駆動源および前記モータを制御する制御装置を備え、
前記制御装置は、
前記駆動輪を回転させ、かつ、前記係合部材を前記第1位置に保持する走行制御部と、
前記駆動輪を停止させ、かつ、前記係合部材を前記第1位置から前記第2位置に移動させる受け渡し制御部と、を有している、請求項1に記載の無人搬送車。
【請求項3】
前記噛み合い式チェーン機構に連結され、前記荷台からの前記パレットの落下を防止するロック機構を備え、
前記ロック機構は、前記係合部材が前記第1位置にあるときには起立し、前記係合部材が前記第1位置から前記第2位置に向けて移動すると傾倒するロック部材を備えている、請求項1に記載の無人搬送車。
【請求項4】
前記荷台に固定され、水平方向に延びる第1ガイド棒と、
前記第1ガイド棒に摺動可能に係合した第1スライダと、
前記第1スライダに固定され、前記第1ガイド棒と平行に配置された第2ガイド棒と、
前記第2ガイド棒に摺動可能に係合した第2スライダと、を備え、
前記係合部材は、前記第2スライダに固定されている、請求項1に記載の無人搬送車。
【請求項5】
前記第1ガイド棒は、車両平面視において前記荷台または前記車両本体と重なっており、
前記係合部材が前記第1位置にあるときに、前記第2ガイド棒は車両平面視において前記荷台または前記車両本体と重なり、
前記係合部材が前記第2位置にあるときに、前記第2ガイド棒の少なくとも一部は車両平面視において前記荷台および前記車両本体の外側に位置する、請求項4に記載の無人搬送車。
【請求項6】
前記噛み合い式チェーン機構に連結され、前記荷台からの前記パレットの落下を防止するロック機構を備え、
前記係合部材が前記第1位置から前記第2位置に移動する方向を第1方向、前記第2位置から前記第1位置に移動する方向を第2方向としたときに、
前記第2スライダは前記第1スライダよりも前記第1方向側に配置され、
前記ロック機構は、
前記荷台に対して前記第1方向および前記第2方向に揺動可能に接続されたロック部材と、
前記ロック部材よりも前記第2方向側に配置され、前記荷台に対して前記第1方向および前記第2方向に揺動可能に接続された揺動部材と、
前記揺動部材に対して前記第1方向および前記第2方向に揺動可能に接続された根元部と前記ロック部材に対して前記第1方向および前記第2方向に揺動可能に接続された先端部とを有するアーム部材と、
前記第2スライダに固定され、前記係合部材が前記第2位置から前記第1位置に移動するときに前記揺動部材と接触することにより前記揺動部材を揺動させ、前記係合部材が前記第1位置から前記第2位置に移動するときに前記揺動部材から離間する接触部材と、を有し、
前記ロック部材は、前記係合部材が前記第2位置から前記第1位置に移動するときに、前記揺動部材の揺動に伴って前記アーム部材に引っ張られることにより起立し、前記係合部材が前記第1位置から前記第2位置に移動するときに傾倒するように構成されている、請求項4に記載の無人搬送車。
【請求項7】
前記係合部材が前記第1位置から前記第2位置に移動する方向を第1方向、前記第2位置から前記第1位置に移動する方向を第2方向、前記第1方向と垂直な方向を第3方向、前記第3方向と逆方向を第4方向としたときに、
前記荷台は、前記係合部材の前記第3方向側および前記第4方向側に配置されたローラ群を有し、
前記各ローラ群は、前記第1方向に並べられた複数のローラを有している、請求項1に記載の無人搬送車。
【請求項8】
前記荷台、前記噛み合い式チェーン機構、および前記係合部材を支持する台車と、
前記台車が前記車両本体に対して少なくとも水平方向に移動可能なように前記車両本体と前記台車とを連結する連結装置と、
を備えている、請求項1に記載の無人搬送車。
【請求項9】
前記荷台は、前記車両本体の上方に配置され、
前記連結装置は、前記荷台の下方かつ前記車両本体の上方に配置されている、請求項8に記載の無人搬送車。
発明の詳細な説明
【技術分野】
【0001】
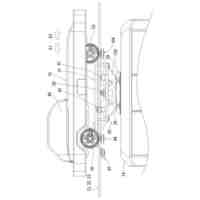
本発明は、設備に向かって自動的に走行すると共に設備とパレットの受け渡しを行う無人搬送車に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
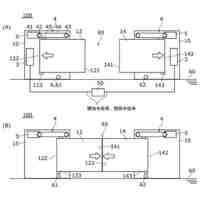
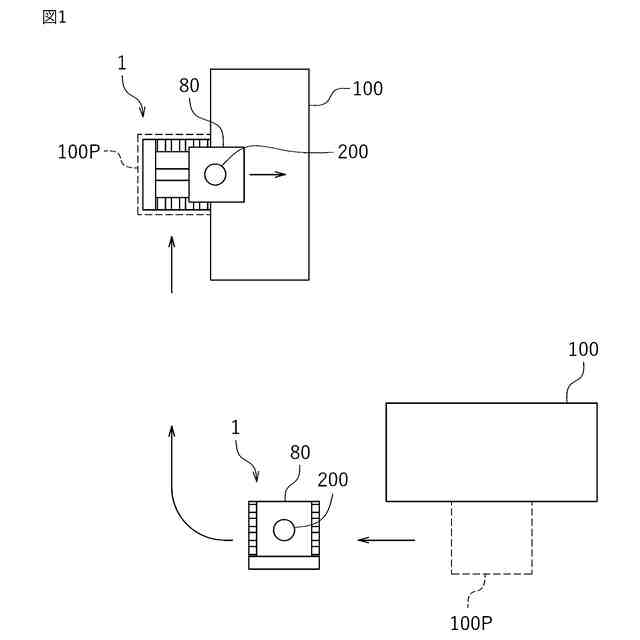
従来から、工場等において、複数の設備の間で荷物を自動的に搬送する無人搬送車が用いられている。無人搬送車は、設備に向かって走行し、設備の手前の位置に到達すると自動的に停止する。無人搬送車は、設備の手前で停止した後、荷物を載せたパレットを設備に引き渡し、または、荷物を載せたパレットを設備から受け取る。
【0003】
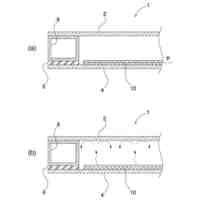
特許文献1には、無人搬送車から組立ラインの治具台車に対して、供給装置を用いて部品載置箱(すなわちパレット)を引き渡す技術が開示されている。無人搬送車は、パレットが載せられる回転可能な複数のカラー(以下、ローラという)と、ローラを駆動するモータとを備えている。供給装置も、パレットが載せられる回転可能な複数のローラと、ローラを駆動するモータとを備えている。無人搬送車が供給装置の手前に停止した後、無人搬送車および供給装置のモータが駆動され、無人搬送車および供給装置のローラが回転する。これにより、部品を載せたパレットは、それらのローラにより、無人搬送車から供給装置に運ばれる。詳しくは、無人搬送車のローラにより、パレットは無人搬送車の外部に運ばれる。供給装置のローラにより、パレットは供給装置の内部に運ばれる。
【先行技術文献】
【特許文献】
【0004】
特開2002-66849号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示された技術では、供給装置の内部にパレットを運ぶために、供給装置にモータが必要である。上記の供給装置および組立ラインは、無人搬送車から荷物を受け取って加工を行う設備の一種である。特許文献1に開示された技術では、無人搬送車からパレットを受け取る駆動力を発生させるモータが必要であり、そのようなモータを設備に設置しなければならない。
【0006】
ここで、設備の低コスト化または小型化のために、設備から上記モータを削除することが考えられる。しかし、その場合、設備のローラはモータによって駆動されないため、設備はパレットを設備の内部にまで運び込むことができない。設備に代わって、無人搬送車が設備の内部にまでパレットを運び入れる必要がある。
【0007】
無人搬送車が設備の内部にまでパレットを運び入れることができるように、無人搬送車のローラを車両本体から設備の方に張り出して配置することが考えられる。しかし、例えば、無人搬送車の走行経路の途中に、障害物(例えば、停止中の他の無人搬送車)が存在する場合がある。無人搬送車が張り出し部分を有する場合、走行中に張り出し部分が障害物に接触する可能性がある。無人搬送車が設備に向かって良好に走行できるよう、無人搬送車は張り出し部分を有していないことが好ましい。
【0008】
本発明はかかる点に鑑みてなされたものであり、その目的は、設備に向かって良好に走行できるとともに、パレットを引き込むモータが設けられていない設備に対して、パレットを良好に受け渡すことができる無人搬送車を提供することである。
【課題を解決するための手段】
【0009】
ここに開示される無人搬送車は、設備に向かって自動的に走行するとともに、前記設備とパレットの受け渡しを行う無人搬送車である。前記無人搬送車は、車両本体と、荷台と、噛み合い式チェーン機構と、係合部材とを備える。前記車両本体は、駆動力を発生させる走行用駆動源と、前記走行用駆動源の駆動力を受けて回転する駆動輪と、を有する。前記荷台は前記車両本体に支持されており、前記荷台に前記パレットが載せられる。前記噛み合い式チェーン機構は、前記車両本体に支持されたケースと、先端部を有しかつ前記ケース内にて巻回された第1および第2のジップチェーンと、前記先端部が前記ケースから離れる方向に前記第1および第2のジップチェーンを送り出し、前記第1および第2のジップチェーンを互いに噛み合わせるモータと、を有する。前記係合部材は、前記第1および第2のジップチェーンの前記先端部に接続されており、前記パレットと着脱自在に係合する。前記噛み合い式チェーン機構は、前記係合部材が車両平面視において前記荷台または前記車両本体と重なる第1位置と、前記係合部材が車両平面視において前記荷台および前記車両本体の外側に位置する第2位置との間で、前記係合部材を移動させるように構成されている。
【0010】
上記無人搬送車によれば、係合部材が第1位置にあるときには、係合部材は車両平面視において荷台または車両本体と重なる位置にある。よって、係合部材が荷台または車両本体から張り出すことが防止される。走行中に係合部材を第1位置に保持することとすれば、無人搬送車が周囲の障害物に接触する可能性を低減することができる。よって、無人搬送車は設備に向かって良好に走行することができる。モータが第1および第2のジップチェーンを送り出すと、係合部材は第1位置から第2位置に移動し、係合部材は車両平面視において荷台および車両本体の外側に移動する。係合部材にはパレットが係合しているので、パレットを荷台の外側にまで運び込むことができる。よって、パレットを引き込むモータが設備に設けられていなくても、無人搬送車に備えられたモータによって、パレットを設備の内部にまで運び入れることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ヤマハ発動機株式会社
船舶推進機
1か月前
ヤマハ発動機株式会社
鞍乗型車両
26日前
ヤマハ発動機株式会社
リーン車両
1か月前
ヤマハ発動機株式会社
鞍乗型車両
26日前
ヤマハ発動機株式会社
生産システム
29日前
ヤマハ発動機株式会社
ワーク計測装置
13日前
ヤマハ発動機株式会社
ワーク搭載装置
26日前
ヤマハ発動機株式会社
テープフィーダ
29日前
ヤマハ発動機株式会社
自動操船システム及び方法
26日前
ヤマハ発動機株式会社
ノズル収容構造体および部品実装機
13日前
ヤマハ発動機株式会社
船舶を制御するためのシステム及び方法
13日前
ヤマハ発動機株式会社
駆動ユニットおよび電動アシスト自転車
1か月前
ヤマハ発動機株式会社
基板の生産システム、及び画像解析装置
5日前
ヤマハ発動機株式会社
船舶を制御するためのシステムおよび方法
26日前
ヤマハ発動機株式会社
船舶を遠隔操船するためのシステム及び方法
26日前
ヤマハ発動機株式会社
操船システム、操船システムの制御方法及び船舶
5日前
ヤマハ発動機株式会社
テープ回収装置および同装置を備えた部品実装装置
1か月前
ヤマハ発動機株式会社
駆動システム、電動車椅子、制御方法およびコンピュータプログラム
今日
ヤマハ発動機株式会社
オペレータ検出システム
21日前
ヤマハ発動機株式会社
ワーク面取得装置、ワーク面取得方法、ワーク面取得プログラムおよび記録媒体
今日
エンシュウコネクティッド株式会社
タップ加工装置およびタップ工具のチッピング検出用コンピュータプログラム
13日前
ヤマハ発動機株式会社
真空浸炭処理が施された歯車、真空浸炭処理が施された歯車を有するエンジンユニット、及び真空浸炭処理が施された歯車を有する鞍乗型車両
1か月前
日本信号株式会社
ホーム柵
3か月前
個人
車両及び走行システム
7か月前
日本信号株式会社
検査装置
11か月前
日本信号株式会社
ホーム柵
3か月前
日本信号株式会社
検査装置
1か月前
近畿車輌株式会社
耐火床構造
2か月前
日本信号株式会社
ホーム柵装置
8か月前
日本車輌製造株式会社
鉄道車両
1か月前
ナブテスコ株式会社
ホームドア装置
3か月前
川崎車両株式会社
鉄道車両用パネル
9か月前
日本車輌製造株式会社
台車組立装置
6か月前
カヤバ株式会社
鉄道車両用制振装置
11か月前
日本信号株式会社
列車接近警報装置
4か月前
近畿車輌株式会社
鉄道車両の床構造
12か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ