TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042154
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023148999
出願日
2023-09-14
発明の名称
教示支援装置、教示支援方法及び教示支援プログラム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20250319BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】禁止領域の位置を決定する時間を短縮できる。
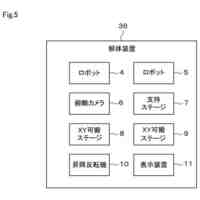
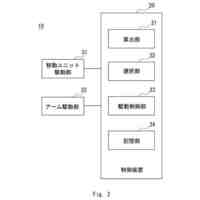
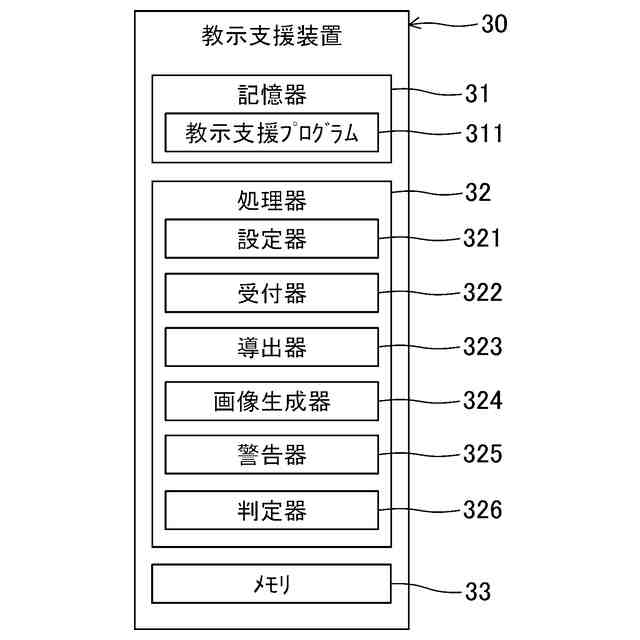
【解決手段】教示支援装置30は、アームと連結されたハンドとを有するロボットのモデルの画像をディスプレイに表示させる。教示支援装置30は、ロボットモデルとロボットモデルの動作領域でない禁止領域とを設定する設定器321と、禁止領域の変更を受け付ける受付器322と、ロボットモデルと禁止領域との干渉を判定する判定器326と、ロボットモデルの姿勢を導出する導出器323と、禁止領域及びロボットモデルの画像を生成する画像生成器324とを備える。禁止領域が変更された場合、画像生成器324は、変更されて移動する禁止領域の画像を生成する。判定器326が変更後の禁止領域との干渉を判定する場合、導出器323は禁止領域に干渉しないロボットモデルの姿勢を導出し、画像生成器324は導出された姿勢に変更する。
【選択図】図3
特許請求の範囲
【請求項1】
アームと前記アームに連結されたエンドエフェクタとを有するロボットのモデルの画像をディスプレイに表示させる教示支援装置であって、
前記ロボットをモデル化したロボットモデルと前記ロボットモデルの動作領域でない禁止領域とを設定する設定器と、
前記禁止領域の変更を受け付ける受付器と、
前記ロボットモデルと前記禁止領域との干渉を判定する判定器と、
前記ロボットモデルの姿勢を導出する導出器と、
前記禁止領域及び前記ロボットモデルの画像を生成する画像生成器とを備え、
前記受付器を介して前記禁止領域が変更された場合、前記画像生成器は、変更されて移動する前記禁止領域の画像を生成し、
前記判定器が前記ロボットモデルと変更後の前記禁止領域との干渉を判定する場合、
前記導出器は、前記禁止領域に干渉しない前記ロボットモデルの姿勢を導出すると共に、
前記画像生成器は、前記画像における前記ロボットモデルの姿勢を前記導出器に導出された姿勢に変更する教示支援装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の教示支援装置において、
前記判定器が前記ロボットモデルと変更後の前記禁止領域との干渉を判定する場合、前記ロボットモデルが前記禁止領域に干渉していることをユーザに報知する警告器をさらに備え、
前記画像生成器は、前記ロボットモデルが前記禁止領域に干渉していることを前記警告器がユーザに報知した後に、前記画像における前記ロボットモデルの姿勢を前記導出器に導出された姿勢に変更する教示支援装置。
【請求項3】
請求項2に記載の教示支援装置において、
前記警告器は、ユーザに報知する際、前記ロボットモデルの表示を前記画像生成器に変更させる教示支援装置。
【請求項4】
請求項1に記載の教示支援装置において、
前記設定器は、前記ロボットモデルのエンドエフェクタの目標位置を設定し、
前記導出器は、前記エンドエフェクタが前記目標位置に位置するときの前記ロボットモデルの姿勢を導出する教示支援装置。
【請求項5】
請求項1に記載の教示支援装置において、
前記ロボットモデルは、前記エンドエフェクタとして、前記アームに連結された第1エンドエフェクタ及び第2エンドエフェクタを含むロボットのモデルである教示支援装置。
【請求項6】
請求項5に記載の教示支援装置において、
前記設定器は、前記ロボットモデルの第1エンドエフェクタの目標位置を設定し、
前記導出器は、前記第1エンドエフェクタが前記目標位置に位置し且つ前記ロボットモデルの第2エンドエフェクタが前記動作領域内の所定位置に位置するときの前記ロボットモデルの姿勢を導出し、
前記判定器が前記ロボットモデルと変更後の前記禁止領域との干渉を判定する場合、前記導出器は、前記第1エンドエフェクタの姿勢を変化させず且つ前記第2エンドエフェクタの姿勢を変化させて、前記禁止領域に干渉しない前記ロボットモデルの姿勢を導出する教示支援装置。
【請求項7】
請求項1に記載の教示支援装置において、
前記設定器は、静的又は動的な干渉物をモデル化した干渉物モデルを設定し、
前記禁止領域は、前記干渉物モデルの内側の領域を含む教示支援装置。
【請求項8】
請求項1に記載の教示支援装置において、
前記設定器は、クリーンルームの筐体をモデル化した筐体モデルを設定し、
前記禁止領域は、前記筐体モデルの外側の領域を含む教示支援装置。
【請求項9】
請求項1に記載の教示支援装置において、
前記判定器が前記ロボットモデルと変更後の前記禁止領域との干渉を判定する場合、前記導出器は、前記禁止領域に干渉しない前記ロボットモデルの位置を導出することで、前記禁止領域に干渉しない前記ロボットモデルの姿勢を導出する教示支援装置。
【請求項10】
請求項1に記載の教示支援装置において、
前記判定器が前記ロボットモデルと変更後の前記禁止領域との干渉を判定する場合、前記導出器は、前記禁止領域に干渉しない前記ロボットモデルの種類を導出することで、前記禁止領域に干渉しない前記ロボットモデルの姿勢を導出する教示支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、教示支援装置、教示支援方法及び教示支援プログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来より、ロボットの姿勢を確認する教示支援装置が知られている。例えば、特許文献1に開示された教示支援装置は、設定された始点及び終点から求められる動作軌跡に基づいて、ロボットモデルの動作をタッチスクリーン上で再生することで、ロボットモデルの動作を確認する。
【先行技術文献】
【特許文献】
【0003】
特許第6526098号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、前述のような教示支援装置では、ユーザがロボットモデルの1つの始点及び1つの終点を設定してから、ロボットモデルの動作を表示している。ここで、ユーザは、ロボットモデルの動作領域でない禁止領域を変更したい場合がある。この場合、ユーザは、禁止領域の適切な位置を見つけるため、禁止領域の複数の位置を確認する必要がある。つまり、ユーザは、禁止領域を1つずつ設定して、禁止領域に干渉しない姿勢が可能であるか否かについて、ロボットモデルの姿勢を1つずつ確認する必要がある。したがって、ロボットモデルの姿勢に基づいて禁止領域の位置を決定する際、禁止領域の位置を決定する時間が増大する。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、禁止領域の位置を決定する時間を短縮することにある。
【課題を解決するための手段】
【0006】
ここに開示された教示支援装置は、アームと前記アームに連結されたエンドエフェクタとを有するロボットのモデルの画像をディスプレイに表示させる教示支援装置であって、前記ロボットをモデル化したロボットモデルと前記ロボットモデルの動作領域でない禁止領域とを設定する設定器と、前記禁止領域の変更を受け付ける受付器と、前記ロボットモデルと前記禁止領域との干渉を判定する判定器と、前記ロボットモデルの姿勢を導出する導出器と、前記禁止領域及び前記ロボットモデルの画像を生成する画像生成器とを備え、前記受付器を介して前記禁止領域が変更された場合、前記画像生成器は、変更されて移動する前記禁止領域の画像を生成し、前記判定器が前記ロボットモデルと変更後の前記禁止領域との干渉を判定する場合、前記導出器は、前記禁止領域に干渉しない前記ロボットモデルの姿勢を導出すると共に、前記画像生成器は、前記画像における前記ロボットモデルの姿勢を前記導出器に導出された姿勢に変更する。
【0007】
ここに開示された教示支援方法は、アームと前記アームに連結されたエンドエフェクタとを有するロボットのモデルの画像をディスプレイに表示させる教示支援方法であって、前記ロボットをモデル化したロボットモデルと前記ロボットモデルの動作領域でない禁止領域とを設定することと、前記禁止領域の変更を受け付けることと、前記ロボットモデルと前記禁止領域との干渉を判定することと、前記ロボットモデルの姿勢を導出し、さらに、前記ロボットモデルと変更後の前記禁止領域との干渉を判定する場合、前記禁止領域に干渉しない前記ロボットモデルの姿勢を導出することと、前記禁止領域及び前記ロボットモデルの画像を生成し、さらに、前記禁止領域が変更された場合、変更されて移動する前記禁止領域の画像を生成し、さらに、前記ロボットモデルと変更後の前記禁止領域との干渉を判定する場合、前記画像における前記ロボットモデルの姿勢を前記導出された姿勢に変更することとを備える。
【0008】
ここに開示された教示支援プログラムは、アームと前記アームに連結されたエンドエフェクタとを有するロボットのモデルの画像をディスプレイに表示させる教示支援プログラムであって、前記ロボットをモデル化したロボットモデルと前記ロボットモデルの動作領域でない禁止領域とを設定する機能と、前記禁止領域の変更を受け付ける機能と、前記ロボットモデルと前記禁止領域との干渉を判定する機能と、前記ロボットモデルの姿勢を導出し、さらに、前記ロボットモデルと変更後の前記禁止領域との干渉を判定する場合、前記禁止領域に干渉しない前記ロボットモデルの姿勢を導出する機能と、前記禁止領域及び前記ロボットモデルの画像を生成し、さらに、前記禁止領域が変更された場合、変更されて移動する前記禁止領域の画像を生成し、さらに、前記ロボットモデルと変更後の前記禁止領域との干渉を判定する場合、前記画像における前記ロボットモデルの姿勢を前記導出された姿勢に変更する機能とをコンピュータに実現させる。
【発明の効果】
【0009】
前記教示支援装置、前記教示支援方法及び前記教示支援プログラムによれば、禁止領域の位置を決定する時間を短縮できる。
【図面の簡単な説明】
【0010】
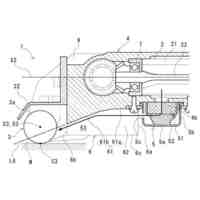
図1は、実施形態に係る教示支援装置を含む教示支援システムを示す概略図である。
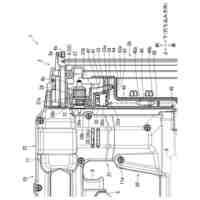
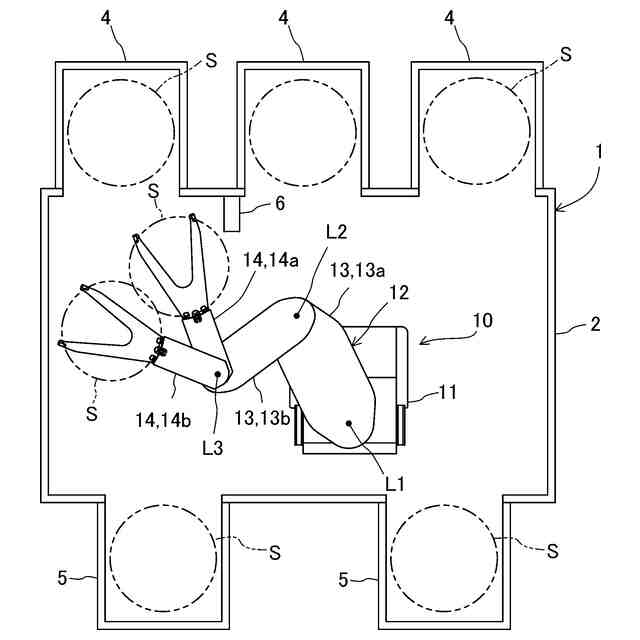
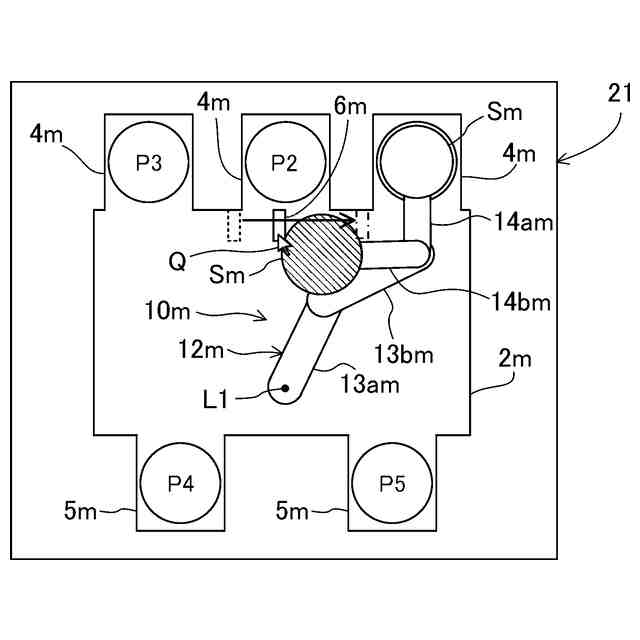
図2は、クリーンルームで使用されるロボットを示す概略図である。
図3は、教示支援装置の構成を示すブロック図である。
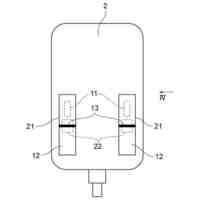
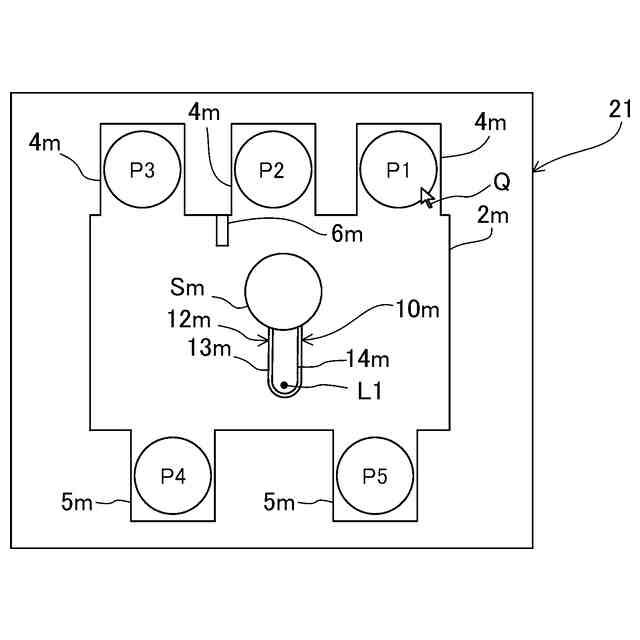
図4は、ディスプレイに表示される各モデルの画像を示す図である。
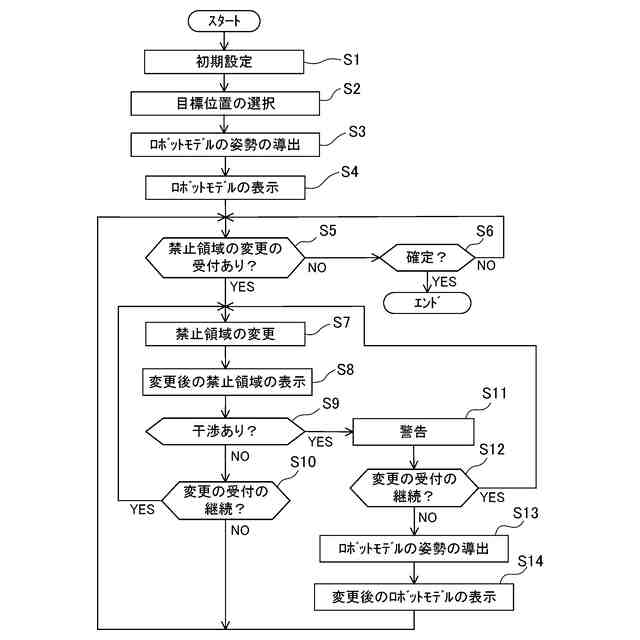
図5は、教示支援装置の動作を示すフローチャートである。
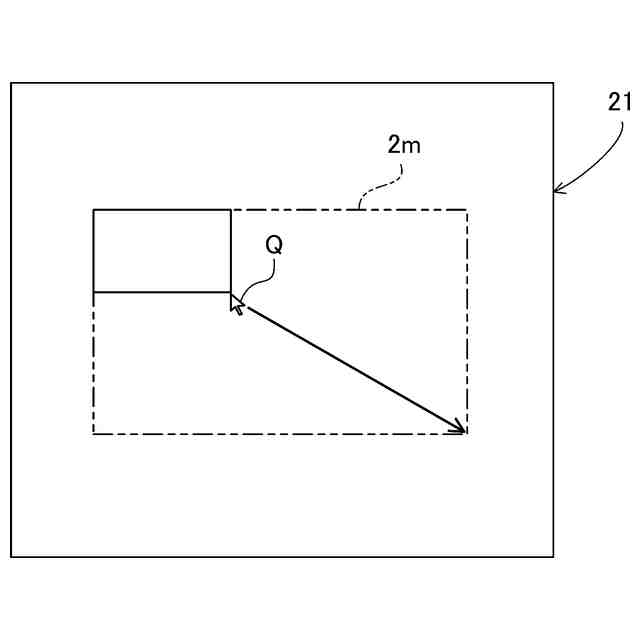
図6は、初期仕様の筐体モデルを含む画像を示す図である。
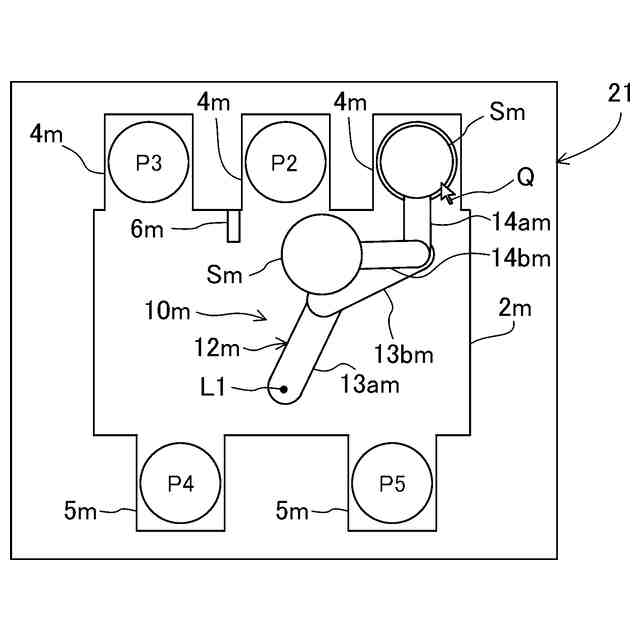
図7は、干渉物モデルの位置を変更する前の画像を示す図である。
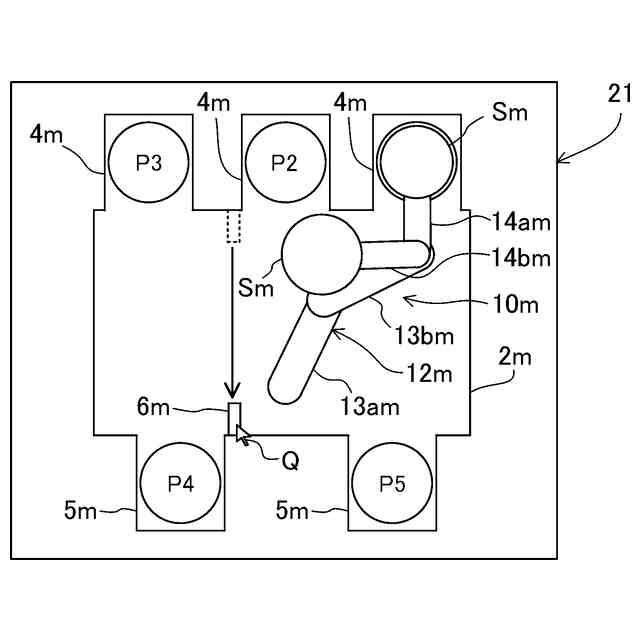
図8は、干渉物モデルの位置を変更した後の画像を示す図である。
図9は、ロボットモデルと干渉物モデルとが干渉しているためにロボットモデルの表示を変更した画像を示す図である。
図10は、姿勢が変更されたロボットモデルの画像を示す図である。
図11は、変形例1に係る教示支援装置において、ロボットモデルと干渉物モデルとが干渉しているためにロボットモデルの表示を変更した画像を示す図である。
図12は、変形例1に係る教示支援装置において、姿勢が変更されたロボットモデルの画像を示す図である。
図13は、変形例2に係る教示支援装置において、ロボットモデルと干渉物モデルとが干渉しているためにロボットモデルの表示を変更した画像を示す図である。
図14は、変形例2に係る教示支援装置において、種類が変更されたロボットモデルの画像を示す図である。
図15は、ディスプレイに表示される各モデルの三次元の画像を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイセイ
搬送装置
28日前
川崎重工業株式会社
ハンド
22日前
株式会社不二越
ロボット
14日前
個人
けがき用治具
16日前
個人
深孔スリーブ駆動ロッド構造
6日前
株式会社不二越
ロボット操作装置
13日前
川崎重工業株式会社
ロボット
14日前
工機ホールディングス株式会社
作業機
1日前
個人
バール
6日前
川崎重工業株式会社
ロボットシステム
22日前
株式会社黒澤鉄工製作所
けがき用治具
16日前
株式会社デンソー
操縦桿
14日前
梅馨堂合同会社
人協働ロボットシステム
8日前
アピュアン株式会社
衝撃工具
29日前
株式会社不二越
基板搬送用ロボット
23日前
ARMA株式会社
UI付エンドエフェクタ
9日前
学校法人法政大学
装着型アシスト装置
3日前
若井ホールディングス株式会社
レンチ構造とその製造方法
16日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
13日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
三菱電機株式会社
トルク締め個所検出システム
6日前
株式会社マキタ
打ち込み工具
28日前
高丸工業株式会社
ロボット操作システムの動作方法
6日前
シブヤパッケージングシステム株式会社
物品移載装置
14日前
株式会社ベッセル工業
インパクト工具
14日前
株式会社デンソー
解体装置および解体プログラム
14日前
JUKI株式会社
ハンドリング装置
8日前
株式会社デンソー
作業装置および作業プログラム
14日前
不二空機株式会社
エアツール及びエアツールの使用方法
22日前
株式会社不二越
通信端末装置及びロボット制御システム
27日前
学校法人 名古屋電気学園
制御システム
20日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ