TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025038738
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145524
出願日
2023-09-07
発明の名称
ロボット用吸着ハンド、ロボットおよび廃棄物処理システム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
15/06 20060101AFI20250312BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット用吸着ハンドと廃棄物との重心位置を、ロボットの質量負荷容量の範囲内に容易に収めることが可能なロボット用吸着ハンドを提供する。
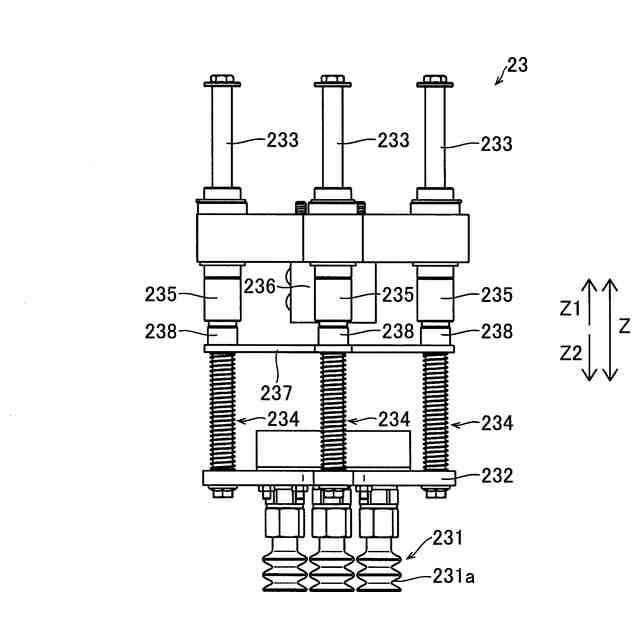
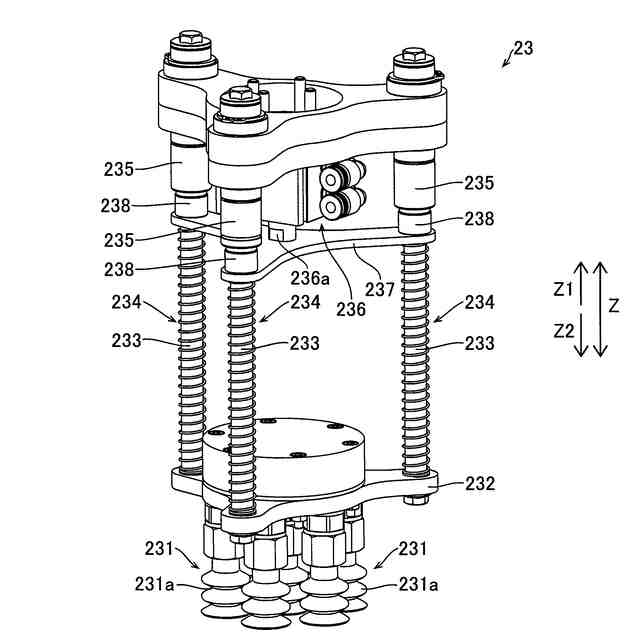
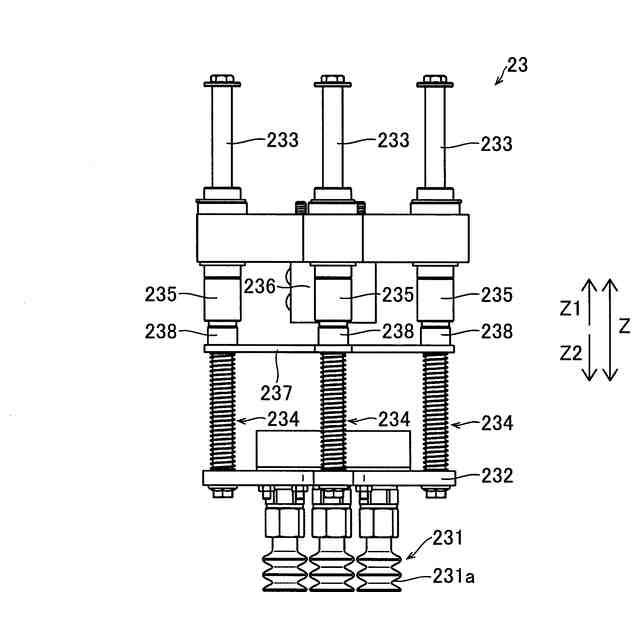
【解決手段】このロボット用吸着ハンド23は、廃棄物としてのビンBを吸着する吸着部231と、吸着部231を支持し、上下方向に移動可能な支持部232と、支持部232を下方に付勢する付勢部材234と、吸着部231が所定の高さまで下降して廃棄物としてのビンBを吸着する際に上方に押されて付勢部材234が縮んだ場合、付勢部材234が縮んだ状態を保持するための保持部235と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
廃棄物を吸着する吸着部と、
前記吸着部を支持し、上下方向に移動可能な支持部と、
前記支持部を下方に付勢する付勢部材と、
前記吸着部が所定の高さまで下降して廃棄物を吸着する際に上方に押されて前記付勢部材が縮んだ場合、前記付勢部材が縮んだ状態を保持するための保持部と、を備える、ロボット用吸着ハンド。
続きを表示(約 1,200 文字)
【請求項2】
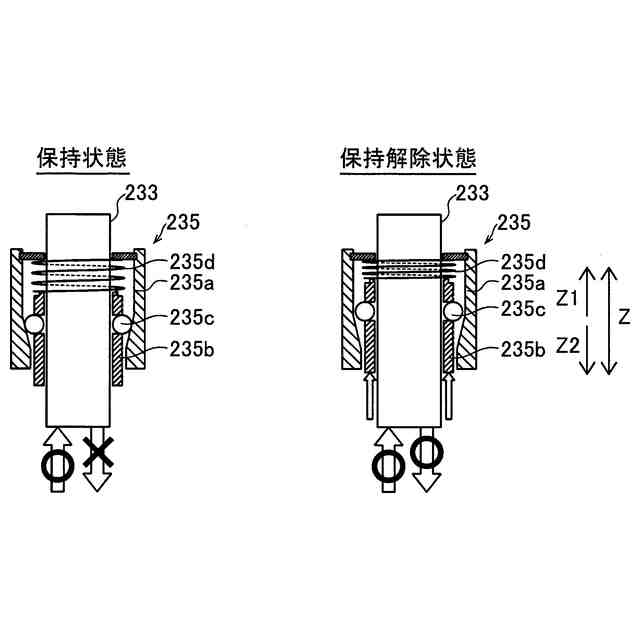
前記保持部は、前記付勢部材が縮んだ状態を保持可能であるとともに、前記付勢部材が縮んだ状態の保持を解除することが可能である、請求項1に記載のロボット用吸着ハンド。
【請求項3】
前記支持部を支持し、上下方向に移動可能なシャフトをさらに備え、
前記付勢部材は、前記シャフトの上下方向の移動に応じて伸縮し、
前記保持部は、前記シャフトが下方に移動できないように前記シャフトを保持する保持状態と、前記シャフトが上方および下方の両方に移動可能なように前記シャフトの保持を解除する保持解除状態とを切り替え可能である、請求項1に記載のロボット用吸着ハンド。
【請求項4】
前記シャフトは、複数設けられており、
前記保持部は、前記複数のシャフトに対応するように複数設けられており、
前記複数の保持部に対して共通に設けられ、前記複数の保持部を同時に前記保持解除状態に駆動する駆動部をさらに備える、請求項3に記載のロボット用吸着ハンド。
【請求項5】
前記複数の保持部に対して共通に設けられ、前記複数の保持部と前記駆動部とを接続する接続部材をさらに備え、
前記駆動部は、前記接続部材を駆動することにより、前記複数の保持部を同時に前記保持解除状態に駆動する、請求項4に記載のロボット用吸着ハンド。
【請求項6】
前記複数のシャフトは、平面視において所定の角度間隔で離間して配置されており、
前記駆動部は、平面視において前記複数のシャフトに囲まれて配置されている、請求項4に記載のロボット用吸着ハンド。
【請求項7】
前記駆動部は、前記保持状態と前記保持解除状態とを切り替えるように、前記複数の保持部を駆動する、請求項4に記載のロボット用吸着ハンド。
【請求項8】
前記駆動部は、エアシリンダである、請求項4に記載のロボット用吸着ハンド。
【請求項9】
前記シャフトは、複数設けられており、
前記保持部は、前記複数のシャフトに対して共通に設けられた第1および第2保持部材を含み、
前記第1保持部材に対して設けられ、前記第1保持部材を駆動する第1駆動部と、
前記第2保持部材に対して設けられ、前記第2保持部材を駆動する第2駆動部と、をさらに備え、
前記第1および第2駆動部は、前記第1および第2保持部材を同時に駆動することにより、前記保持部を前記保持解除状態に駆動する、請求項3に記載のロボット用吸着ハンド。
【請求項10】
前記吸着部は、複数設けられており、
前記支持部は、前記複数の吸着部を支持する、請求項1に記載のロボット用吸着ハンド。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボット用吸着ハンド、ロボットおよび廃棄物処理システムに関し、特に、廃棄物を吸着するロボット用吸着ハンド、ロボットおよび廃棄物処理システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、物体を吸着するロボット用吸着ハンドが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、ロボット用ハンド吸着ハンドとして、物体を吸着するエンドエフェクタが開示されている。このエンドエフェクタは、物体を吸着する吸着カップと、吸着カップに連結する吸着シャフトと、変位復帰機構とを備えている。この変位復帰機構は、圧縮ばねなどの付勢機構であり、吸着カップが物体への接触により上方に変位された後、下方の初期位置に復帰するための付勢力を付与する。
【先行技術文献】
【特許文献】
【0004】
特許第6832599号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に記載されたエンドエフェクタでは、物体を吸着した後のエンドエフェクタと物体との重心位置が、物体の質量が加算される分、物体を吸着する前のエンドエフェクタ単体の重心位置よりも下方に位置してしまう。ロボットには、エンドエフェクタと物体との重心位置が収まるべき質量負荷容量の範囲が設定されているが、エンドエフェクタと物体との重心位置が下方に位置した場合、エンドエフェクタと物体との重心位置が、ロボットの質量負荷容量の範囲内に収まらない場合があるという問題点がある。
【0006】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボット用吸着ハンドと廃棄物との重心位置を、ロボットの質量負荷容量の範囲内に容易に収めることが可能なロボット用吸着ハンド、ロボットおよび廃棄物処理システムを提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、この開示の第1の局面によるロボット用吸着ハンドは、廃棄物を吸着する吸着部と、吸着部を支持し、上下方向に移動可能な支持部と、支持部を下方に付勢する付勢部材と、吸着部が所定の高さまで下降して廃棄物を吸着する際に上方に押されて付勢部材が縮んだ場合、付勢部材が縮んだ状態を保持するための保持部と、を備える。
【0008】
この開示の第1の局面によるロボット用吸着ハンドでは、吸着部が所定の高さまで下降して廃棄物を吸着する際に上方に押されて付勢部材が縮んだ場合、付勢部材が縮んだ状態を保持する保持部を設ける。これにより、保持部により付勢部材が縮んだ状態を保持することができるので、付勢部材が縮んだ後に伸びた状態に戻る場合に比べて、ロボット用吸着ハンドと廃棄物との重心位置を上方にすることができる。その結果、ロボット用吸着ハンドと廃棄物との重心位置を、ロボットの質量負荷容量の範囲内に容易に収めることができる。
【0009】
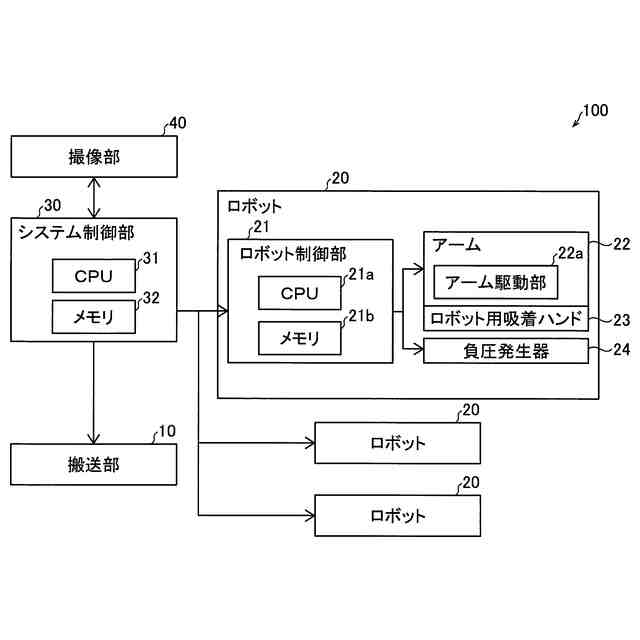
上記目的を達成するために、この開示の第2の局面によるロボットは、アームと、アームの先端側に接続されたロボット用吸着ハンドと、を備え、ロボット用吸着ハンドは、廃棄物を吸着する吸着部と、吸着部を支持し、上下方向に移動可能な支持部と、支持部を下方に付勢する付勢部材と、吸着部が所定の高さまで下降して廃棄物を吸着する際に上方に押されて付勢部材が縮んだ場合、付勢部材が縮んだ状態を保持するための保持部と、を含む。
【0010】
この開示の第2の局面によるロボットでは、吸着部が所定の高さまで下降して廃棄物を吸着する際に上方に押されて付勢部材が縮んだ場合、付勢部材が縮んだ状態を保持するための保持部を設ける。これにより、保持部により付勢部材が縮んだ状態を保持することができるので、付勢部材が縮んだ後に伸びた状態に戻る場合に比べて、ロボット用吸着ハンドと廃棄物との重心位置を上方にすることができる。その結果、ロボット用吸着ハンドと廃棄物との重心位置を、ロボットの質量負荷容量の範囲内に容易に収めることが可能なロボットを提供することができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
22日前
株式会社アイセイ
搬送装置
28日前
株式会社不二越
ロボット
14日前
個人
けがき用治具
16日前
個人
深孔スリーブ駆動ロッド構造
6日前
株式会社不二越
ロボット操作装置
13日前
川崎重工業株式会社
ロボット
14日前
工機ホールディングス株式会社
作業機
1日前
個人
バール
6日前
川崎重工業株式会社
ロボットシステム
22日前
株式会社デンソー
操縦桿
14日前
株式会社黒澤鉄工製作所
けがき用治具
16日前
梅馨堂合同会社
人協働ロボットシステム
8日前
ARMA株式会社
UI付エンドエフェクタ
9日前
アピュアン株式会社
衝撃工具
29日前
株式会社不二越
基板搬送用ロボット
23日前
学校法人法政大学
装着型アシスト装置
3日前
若井ホールディングス株式会社
レンチ構造とその製造方法
16日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
作業機
13日前
三菱電機株式会社
トルク締め個所検出システム
6日前
株式会社マキタ
打ち込み工具
28日前
高丸工業株式会社
ロボット操作システムの動作方法
6日前
シブヤパッケージングシステム株式会社
物品移載装置
14日前
中国電力株式会社
電動ドライバー
今日
株式会社不二越
ロボットの教示システム及び教示方法
今日
JUKI株式会社
ハンドリング装置
8日前
株式会社ベッセル工業
インパクト工具
14日前
株式会社デンソー
解体装置および解体プログラム
14日前
株式会社デンソー
作業装置および作業プログラム
14日前
不二空機株式会社
エアツール及びエアツールの使用方法
22日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ