TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025038618
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145343
出願日
2023-09-07
発明の名称
作業システム
出願人
株式会社オカムラ
,
モーションリブ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
3/00 20060101AFI20250312BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】マスタ側デバイスにより操作されるスレーブ側デバイスのハンド部の動作に集中できる作業システムを提供する。
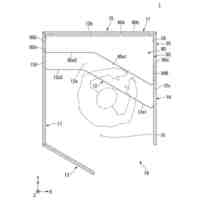
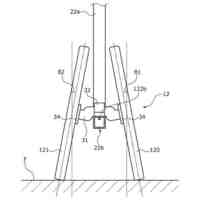
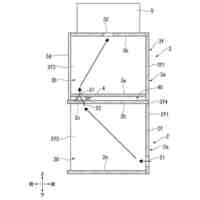
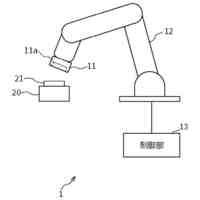
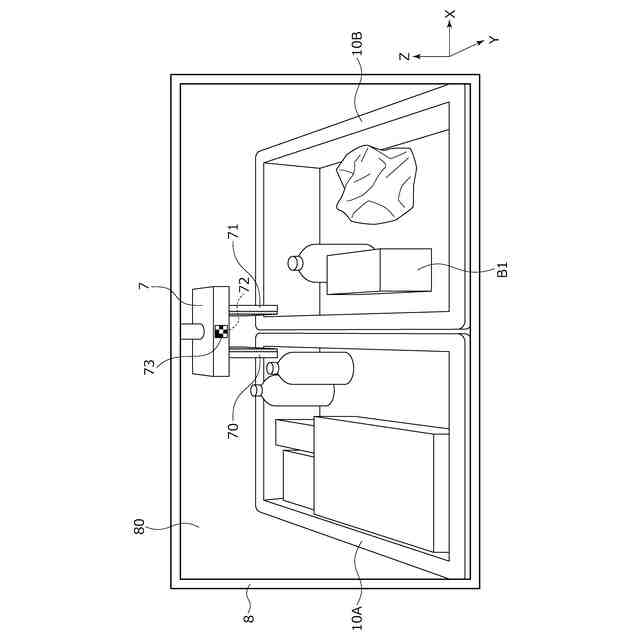
【解決手段】操作者によるマスタ側デバイス4の操作がスレーブ側デバイス5に伝えられることにより、対象物に対してピックアンドプレース工程を行うことが可能な作業システムであって、作業システムは、スレーブ側デバイス5を構成するハンド部7が配置された作業領域を撮像する撮像手段9と、撮像手段9で撮像した映像を表示する表示手段8と、ハンド部7から特定方向における対象物との距離を測距可能な測距手段70と、撮像手段9で撮像した映像を解析しハンド部7の位置を特定する特定手段31と、を備え、表示手段8では、特定手段31で特定されたハンド部7の位置に測距手段70で測距された距離情報を示す距離表示100がオーバーレイ表示される。
【選択図】図3
特許請求の範囲
【請求項1】
操作者によるマスタ側デバイスの操作がスレーブ側デバイスに伝えられることにより、対象物に対してピックアンドプレース工程を行うことが可能な作業システムであって、
前記作業システムは、前記スレーブ側デバイスを構成するハンド部が配置された作業領域を撮像する撮像手段と、前記撮像手段で撮像した映像を表示する表示手段と、前記ハンド部から特定方向における対象物との距離を測距可能な測距手段と、前記撮像手段で撮像した映像を解析し前記ハンド部の位置を特定する特定手段と、を備え、
前記表示手段では、前記特定手段で特定された前記ハンド部の位置に前記測距手段で測距された距離情報を示す距離表示がオーバーレイ表示されることを特徴とする作業システム。
続きを表示(約 500 文字)
【請求項2】
前記距離表示では、前記ハンド部の基準位置と対象物とが適正距離になったことに基づく報知が行われることを特徴とする請求項1に記載の作業システム。
【請求項3】
前記適正距離は、前記ハンド部の把持部と対象物とが把持方向に重なった状態となる距離であることを特徴とする請求項2に記載の作業システム。
【請求項4】
前記距離表示は、前記ハンド部の基準位置と対象物との距離に応じて変化する仮想メータを有していることを特徴とする請求項1に記載の作業システム。
【請求項5】
前記測距手段は、可視のレーザ距離計であることを特徴とする請求項1に記載の作業システム。
【請求項6】
前記ハンド部には、目印が付されており、前記特定手段は、前記撮像手段で撮像した映像から前記目印を見つけることで、前記ハンド部の位置を特定するようになっており、
前記作業システムでは、前記目印の識別情報と、前記測距手段の識別情報と、前記マスタ側デバイスの識別情報と、が紐付けられて管理されていることを特徴とする請求項1ないし5のいずれかに記載の作業システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ピックアンドプレース工程の遠隔操作を可能とする作業システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、インターネットを利用した商品購入やサービス利用の普及による電子商取引(EC)市場の拡大を受けて、物流現場においては、物流量の増加や深刻な人手不足等の問題を解決するため、作業ロボットによる物流プロセスの自動化が急ピッチで進められている。
【0003】
特許文献1~3には、マスタ側デバイスの動作をスレーブ側デバイスに伝えるとともに、スレーブ側デバイスに対する物品からの反力の入力をマスタ側デバイスにフィードバックする機能、すなわちバイラテラル制御機能を実現することができる位置・力制御装置が提案されており、人のような繊細な作業を作業ロボットにより実現可能となっている。
【0004】
また、特許文献4には、個別の物品を仕分けるピッキング作業をロボットにより自動化するにあたって、人工知能(AI)では完結できない判断や作業を人(操作者)が作業ロボットを遠隔操作することによりサポートする作業システムが提案されている。特許文献4の作業システムは、スレーブ側に設けられたカメラにより撮影され、マスタ側のディスプレイに表示されるリアルタイム映像における対象物に対して、所定のマーク画像を合成して提示することで、操作者は作業支援が必要な対象物を容易に識別することができ、操作者によるマスタ側デバイスの操作部の操作がスレーブ側デバイスのハンド部に伝えられることにより、スレーブ側デバイスのハンド部により特定の位置にある特定の対象物を摘み上げ、保持した状態で所定の位置まで移送し、そこに対象物を配置するピックアンドプレース工程と呼ばれる一連の作業を行うことが可能になっている。
【先行技術文献】
【特許文献】
【0005】
特許第4696307号公報(第6頁~第7頁、第1図)
特許第6382203号公報(第8頁~第10頁、第1図)
特許第6598401号公報(第9頁~第11頁、第1図)
特開2018-153874号公報(第5頁~第6頁、第1図)
特許第7224559号公報(第20頁、第2図)
【発明の概要】
【発明が解決しようとする課題】
【0006】
また、このような作業システムとしては、スレーブ側デバイスのハンド部と対象物との距離を測距する測距センサを備えているもの(特許文献5参照)があり、測距センサで計測された値が表示手段に表示されるようになっている。特許文献5においては、操作者はピックアンドプレース工程を行う中でマスタ側デバイスにより操作され、表示手段に表示されるスレーブ側デバイスのハンド部の動作に主に意識および視線を向けている。測距センサで計測された値の表示を確認する場合には、これらの間で意識および視線を行き来させる必要があり、スレーブ側デバイスのハンド部の動作に集中できず、また対象物との距離を正確に把握しながらの操作が困難になる虞があった。
【0007】
本発明は、このような問題点に着目してなされたもので、マスタ側デバイスにより操作されるスレーブ側デバイスのハンド部の動作に集中できる作業システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するために、本発明の作業システムは、
操作者によるマスタ側デバイスの操作がスレーブ側デバイスに伝えられることにより、対象物に対してピックアンドプレース工程を行うことが可能な作業システムであって、
前記作業システムは、前記スレーブ側デバイスを構成するハンド部が配置された作業領域を撮像する撮像手段と、前記撮像手段で撮像した映像を表示する表示手段と、前記ハンド部から特定方向における対象物との距離を測距可能な測距手段と、前記撮像手段で撮像した映像を解析し前記ハンド部の位置を特定する特定手段と、を備え、
前記表示手段では、前記特定手段で特定された前記ハンド部の位置に前記測距手段で測距された距離情報を示す距離表示がオーバーレイ表示されることを特徴としている。
この特徴によれば、スレーブ側デバイスを構成するハンド部から特定方向における対象物との距離情報を示す距離表示は、撮像手段で撮像した映像を表示する表示手段において、特定手段により特定されたハンド部の位置にオーバーレイ表示されることにより、距離表示をハンド部の動作に追従させることができ、操作者は、ハンド部から視線を大きく動かさずに距離表示からハンド部と対象物との距離を直感的に把握できるため、マスタ側デバイスの操作によるハンド部の動作に集中することができる。
【0009】
前記距離表示では、前記ハンド部の基準位置と対象物とが適正距離になったことに基づく報知が行われることを特徴としている。
この特徴によれば、操作者が報知を確認することにより、ハンド部の操作タイミングの目安とすることができるため、作業性を向上させることができる。
【0010】
前記適正距離は、前記ハンド部の把持部と対象物とが把持方向に重なった状態となる距離であることを特徴としている。
この特徴によれば、ハンド部の把持部により対象物が把持可能となった状態で報知が行われるため、ハンド部の把持部による把持作業を確実に行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社オカムラ
ブース
今日
株式会社オカムラ
間仕切
2日前
株式会社オカムラ
連結保管庫
10日前
川崎重工業株式会社
ハンド
16日前
株式会社アイセイ
搬送装置
22日前
株式会社マキタ
電動工具
1か月前
株式会社不二越
ロボット
8日前
国立大学法人金沢大学
ロボット
28日前
個人
けがき用治具
10日前
個人
深孔スリーブ駆動ロッド構造
今日
株式会社不二越
ロボット操作装置
7日前
川崎重工業株式会社
ロボット
8日前
株式会社ケー・エフ・シー
締結構造
1か月前
個人
バール
今日
日本信号株式会社
作業機制御システム
1か月前
株式会社デンソー
操縦桿
8日前
川崎重工業株式会社
ロボットシステム
16日前
株式会社黒澤鉄工製作所
けがき用治具
10日前
梅馨堂合同会社
人協働ロボットシステム
2日前
株式会社京阪エンジニアリング
脱着装置
1か月前
株式会社不二越
基板搬送用ロボット
17日前
アピュアン株式会社
衝撃工具
23日前
ARMA株式会社
UI付エンドエフェクタ
3日前
株式会社スター精機
ワーク搬送装置
1か月前
株式会社マキタ
集塵アタッチメント
1か月前
トヨタ自動車株式会社
把持装置、把持方法
1か月前
株式会社コスメック
把持装置
29日前
国立大学法人 東京大学
ロボットアーム
29日前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社不二越
ロボットビジョンシステム
1か月前
原利興工業有限公司
工具用スリーブ
28日前
株式会社マキタ
作業機
28日前
株式会社マキタ
電動工具
22日前
株式会社マキタ
電動工具
22日前
株式会社マキタ
電動工具
22日前
株式会社マキタ
電動工具
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ