TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025035433
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142470
出願日
2023-09-01
発明の名称
制御装置及び制御方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B63B
49/00 20060101AFI20250306BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】船舶の着岸制御に関する技術を改善する。
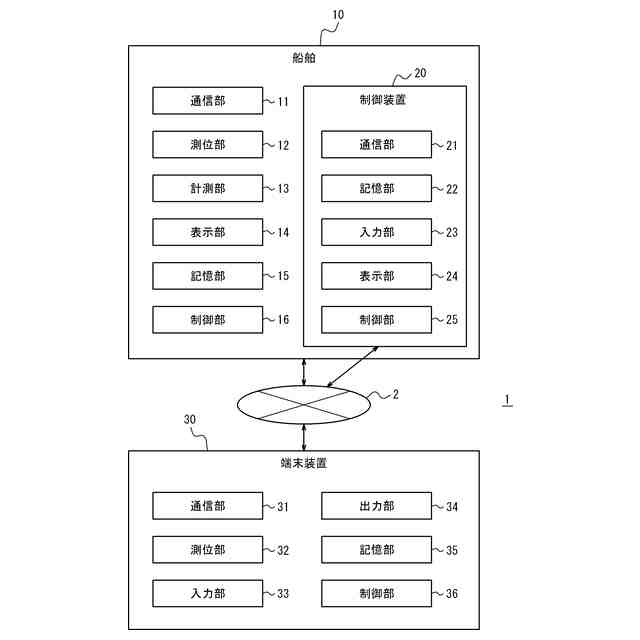
【解決手段】制御装置20は、船舶10の着岸地点が選択されると、選択された着岸地点へ船舶10を着岸させる自動操縦を開始可能な第1の水域を設定し、選択された着岸地点と、設定された第1の水域とを地図情報とともに船舶10に備えられた表示画面に表示する制御部25を有する。
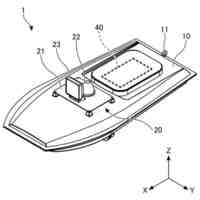
【選択図】図1
特許請求の範囲
【請求項1】
船舶に搭載される制御装置であって、
前記船舶の着岸地点が選択されると、選択された前記着岸地点へ前記船舶を着岸させる自動操縦を開始可能な第1の水域を設定し、選択された前記着岸地点と、設定された前記第1の水域とを地図情報とともに前記船舶に備えられた表示画面に表示する制御部を有する、制御装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記制御部は、更に、前記船舶の位置及び船首方向の情報を取得し、前記情報に基づいて、前記船舶が着岸可能な1以上の登録地点を抽出し、抽出された前記1以上の登録地点を前記表示画面に表示する、制御装置。
【請求項3】
請求項2に記載の制御装置であって、
前記制御部は、前記1以上の登録地点の一つが前記船舶の着岸地点として選択されると、前記着岸地点の選択を受付る、制御装置。
【請求項4】
請求項1に記載の制御装置であって、
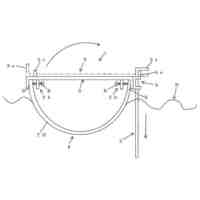
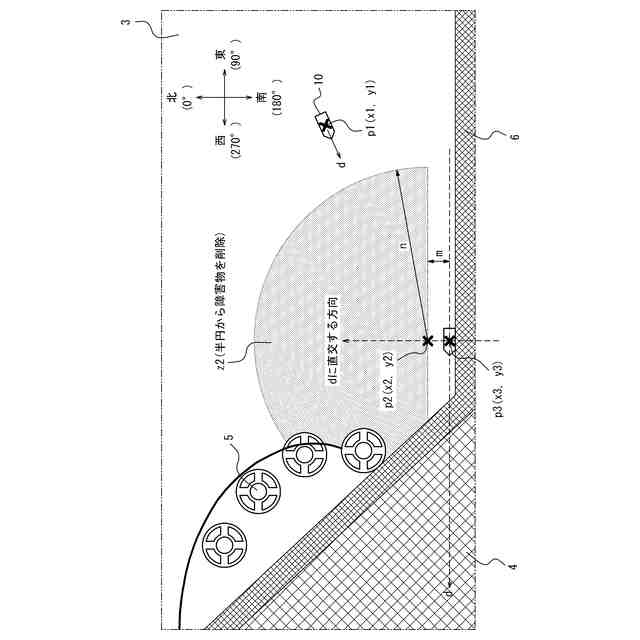
前記第1の水域は、選択された前記着岸地点から、前記船舶の右舷着岸時又は左舷着岸時の船首方向に直交する海洋側の方向に、所定の距離だけ離隔した地点を中心とした、所定の半径を有する円を、前記船首方向に平行な直線で2等分した2つの半円のうち、海洋側の半円の内側を範囲内とする水域である、制御装置。
【請求項5】
請求項1に記載の制御装置であって、
前記制御部は、前記第1の水域に障害物が検知されると、前記第1の水域から前記障害物が存在する領域を削除した第2の水域を設定し、前記第1の水域に代えて、設定された前記第2の水域を前記表示画面に表示する、制御装置。
【請求項6】
請求項5に記載の制御装置であって、
前記障害物は、前記表示画面に表示された桟橋、岸壁、及び浮標を含む人口構造物、地形的又は法的に着岸できない領域、又は前記船舶が備えるセンサにより検知された前記船舶の航行の妨げとなる物体である、制御装置。
【請求項7】
請求項5に記載の制御装置であって、
前記制御部は、前記第1の水域又は前記第2の水域において、前記第1の水域又は前記第2の水域の一部であって、前記船舶の着岸時の船首方向に応じて定まる前記一部を、前記自動操縦を開始可能な第3の水域として設定し、前記第1の水域又は第2の水域に代えて、設定された前記第3の水域を前記表示画面に表示する、制御装置。
【請求項8】
請求項7に記載の制御装置であって、
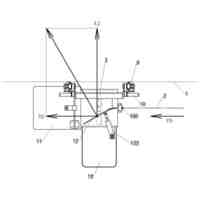
前記第3の水域は、前記着岸地点から、前記船舶の右舷着岸時又は左舷着岸時の船首方向に直交する海洋側の方向に、所定の距離だけ離隔した地点を中心とした、所定の半径を有する円を、前記船首方向に平行な直線で2等分した2つの半円のうち、海洋側の半円の内側を範囲内とする水域を、前記着岸地点を通過する、前記船舶の着岸時の船首方向に直交する線分で2等分した2つの4分円のうち、船尾側の4分円の内側を範囲内とする水域である、制御装置。
【請求項9】
請求項7に記載の制御装置であって、
前記第3の水域は、前記船舶が前記着岸地点に右舷着岸するか左舷着岸するかにより定まる、制御装置。
【請求項10】
請求項1から9のいずれか一項に記載の制御装置であって、
前記制御部は、更に、前記船舶の位置及び船首方向を前記地図情報とともに前記表示画面に表示する、制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置及び制御方法に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、船舶の着岸制御に関する技術が知られている。例えば特許文献1には、船舶の着岸動作を支援する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-40470号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
船舶の着岸制御は、安全性の観点から、船舶が着岸地点から所定範囲の水域に進入しないと開始できない。しかし、船舶操縦者は、着岸制御が可能な水域を把握する事が出来ない。したがって、利便性の観点から、船舶の着岸制御に関する技術には改善の余地があった。
【0005】
かかる事情に鑑みてなされた本開示の目的は、船舶の着岸制御に関する技術を改善することにある。
【課題を解決するための手段】
【0006】
本開示の一実施形態に係る制御装置は、船舶に搭載される制御装置であって、前記船舶の着岸地点が選択されると、選択された前記着岸地点へ前記船舶を着岸させる自動操縦を開始可能な第1の水域を設定し、選択された前記着岸地点と、設定された前記第1の水域とを地図情報とともに前記船舶に備えられた表示画面に表示する制御部を有する。
【0007】
本開示の一実施形態に係る制御方法は、船舶に搭載される制御装置が実行する制御方法であって、前記制御装置により、前記船舶の着岸地点が選択されると、選択された前記着岸地点へ前記船舶を着岸させる自動操縦を開始可能な第1の水域を設定することと、選択された前記着岸地点と、設定された前記第1の水域とを地図情報とともに前記船舶に備えられた表示画面に表示することと、を実行する。
【発明の効果】
【0008】
本開示の一実施形態によれば、船舶の着岸制御に関する技術が改善される。
【図面の簡単な説明】
【0009】
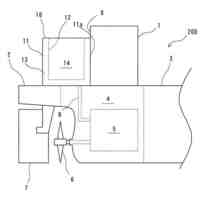
本開示の一実施形態に係るシステムの概略構成例を示すブロック図である。
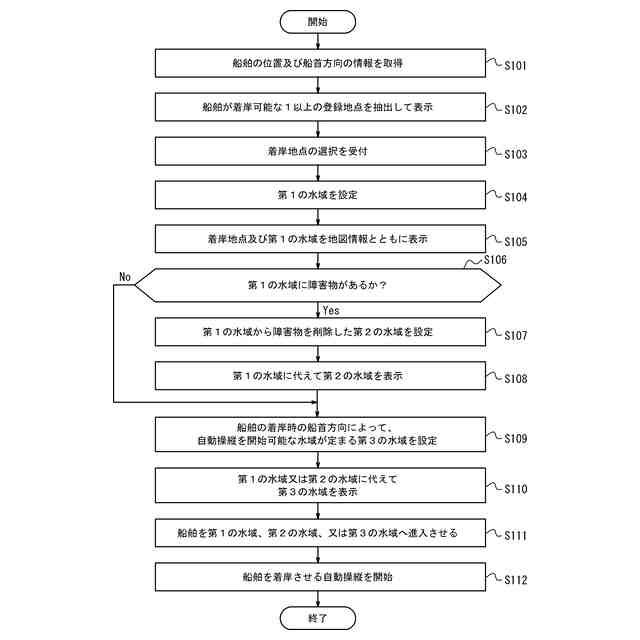
制御装置の動作例を示すフローチャートである。
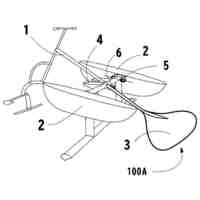
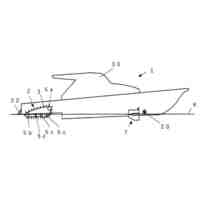
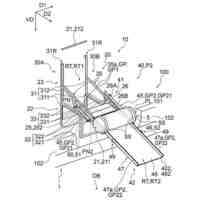
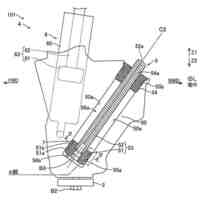
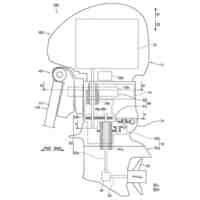
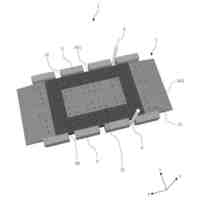
船舶の部分名称の一例を示す概略図である。
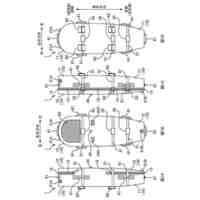
第1の水域の一例を示す概略図である。
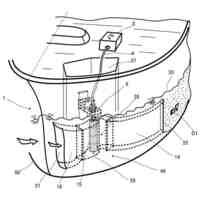
第2の水域の一例を示す概略図である。
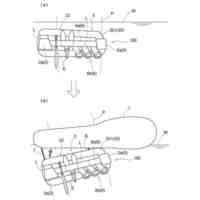
第3の水域の一例を示す概略図である。
第3の水域の一例を示す概略図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
川下り用船
3か月前
個人
発電船
4か月前
個人
シーアンカー
6か月前
個人
船用横揺防止具
1か月前
個人
補助機構
今日
個人
流体抵抗低減省エネ船
11か月前
小柳建設株式会社
台船
6か月前
ウラカミ合同会社
曳航ロボット
7か月前
炎重工株式会社
浮標
2か月前
炎重工株式会社
浮標
2か月前
炎重工株式会社
移動体
5か月前
個人
水陸両用移動装置
7か月前
株式会社フルトン
水中捕捉装置
1日前
個人
船舶
2か月前
ダイハツ工業株式会社
ジャケット
8か月前
個人
回転式による流体流出防止タンカー
今日
オーケー工業株式会社
係留フック
20日前
トヨタ自動車株式会社
ガンネル治具
9か月前
誠加興業股分有限公司
呼吸用マスク
7か月前
個人
海洋「いかだ」上の風力発電システム
11か月前
ヤマハ発動機株式会社
船外機
2か月前
常石造船株式会社
メタノール燃料船
3か月前
個人
キャタピラ推進式高速船
10か月前
株式会社テラサン
位置保持システム
5か月前
株式会社神戸タフ興産
船舶の甲板構造
3か月前
藤倉コンポジット株式会社
架台
2か月前
炎重工株式会社
自律航行浮遊体
2か月前
川崎汽船株式会社
ドライアイス輸送船
8か月前
株式会社大林組
浮体式構造物の設置方法
20日前
株式会社大林組
水中潜行システム
1か月前
ヤマハ発動機株式会社
船外機および船舶
1か月前
個人
搬送器材
11か月前
ヤマハ発動機株式会社
船外機および船舶
1か月前
ASTI株式会社
操作機構取付構造
4か月前
高階救命器具株式会社
救命具
9か月前
株式会社小野田産業
シェルタ
9か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ