TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025034724
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141296
出願日
2023-08-31
発明の名称
電動ドライバ及び自動機システム、並びに自動機システムのダイレクトティーチングを行う方法及び自動機システムで螺合部材の締め付けを行なう方法
出願人
日東工器株式会社
代理人
個人
主分類
B23P
19/06 20060101AFI20250306BHJP(工作機械;他に分類されない金属加工)
要約
【課題】自動機用の電動ドライバにおけるダイレクトティーチング時及び締付完了後の問題を解決可能な電動ドライバを提供する。
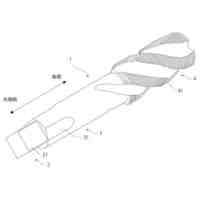
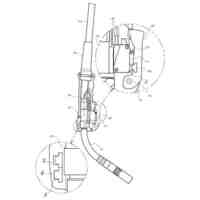
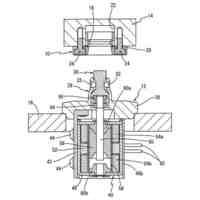
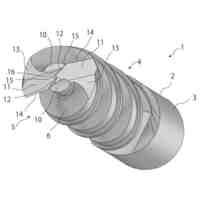
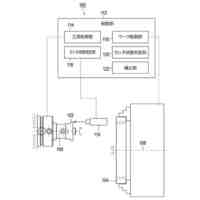
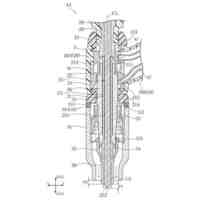
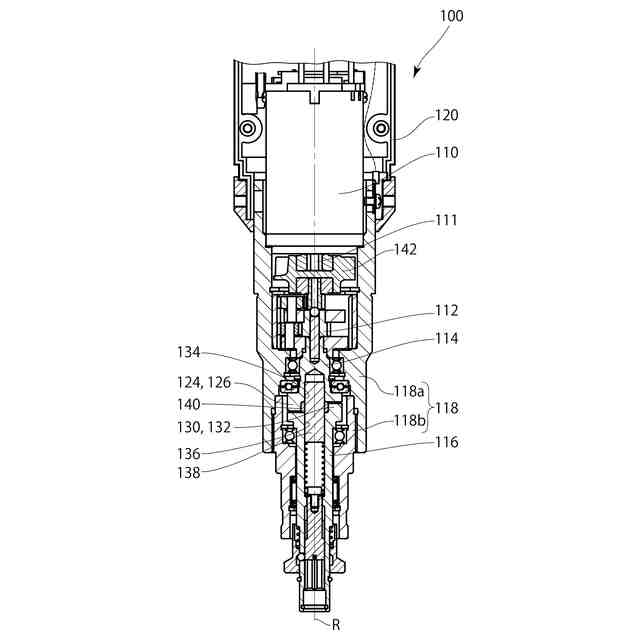
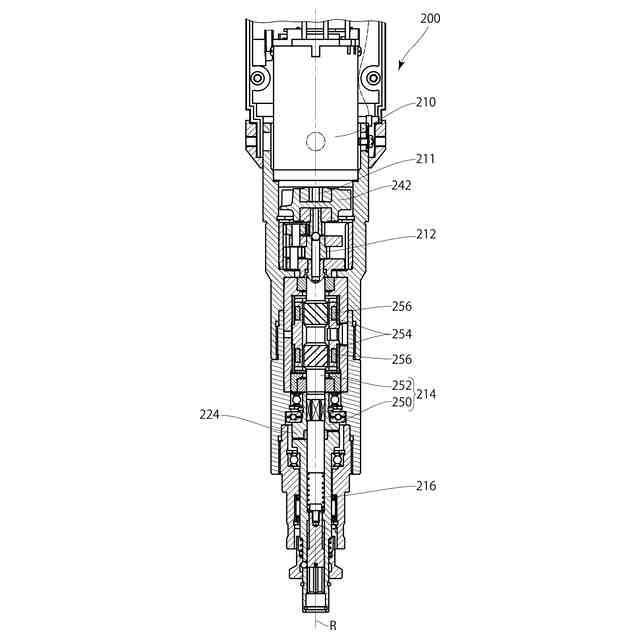
【解決手段】 自動機用の電動ドライバ100は、電動モータ110と、電動モータ110に連結された減速ギヤ機構112と、減速ギヤ機構に連結されたドライブシャフト114と、回転軸線Rの周りで回転可能に保持されたビットホルダ116とを備える。ドライブシャフト114は、減速ギヤ機構112を介して電動モータ110によって回転軸線Rの周りで回転駆動される。ビットホルダ116は、ドライブシャフト114に回転方向で係合してドライブシャフト114とともに回転する。また、ビットホルダ116は、所定の回転角の範囲内でドライブシャフト114に対して相対的に回転可能とされている。
【選択図】図2
特許請求の範囲
【請求項1】
自動機用の電動ドライバであって、
電動モータと、
前記電動モータに連結された減速ギヤ機構と、
前記減速ギヤ機構に連結され、前記減速ギヤ機構を介して前記電動モータによって回転軸線の周りで回転駆動されるドライブシャフトと、
前記回転軸線の周りで回転可能に保持され、前記ドライブシャフトに回転方向で係合して前記ドライブシャフトとともに回転するビットホルダと、
を備え、
前記ビットホルダは、所定の回転角の範囲内で前記ドライブシャフトに対して相対的に回転可能とされた、電動ドライバ。
続きを表示(約 1,600 文字)
【請求項2】
前記ドライブシャフトと前記ビットホルダが、前記回転軸線に沿って前後方向に並べて配置され、
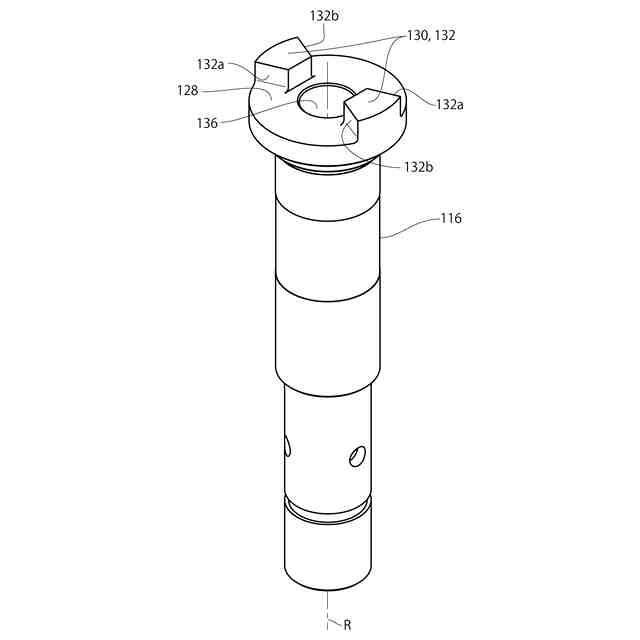
前記ドライブシャフトが、前端面と、前記前端面から前方に突出した第1係合突部とを有し、
前記ビットホルダが、前記ドライブシャフトの前記前端面に面する後端面と、前記後端面から後方に突出する第2係合突部とを有し、
前記第1係合突部と前記第2係合突部とが前記回転方向で係合するようにされた、請求項1に記載の電動ドライバ。
【請求項3】
前記第1係合突部が、前記回転軸線に対して対称な位置に配置された2つの扇形状突起を有し、各扇形状突起が前記回転軸線の放射方向に延びる2つの側面を有し、前記2つの側面の間の前記回転方向での角度が略45度であり、
前記第2係合突部が、前記回転軸線に対して対称な位置に配置された2つの扇形状突起を有し、各扇形状突起が前記回転軸線の放射方向に延びる2つの側面を有し、前記2つの側面の間の前記回転方向での角度が略45度であり、
前記第1係合突部の前記側面と前記第2係合突部の前記側面とが前記回転方向で係合するようにされた、請求項2に記載の電動ドライバ。
【請求項4】
前記ドライブシャフトと前記ビットホルダとの間に配置され、前記ドライブシャフトと前記ビットホルダとが前記回転軸線の方向で直接接触しないようにするスペーサをさらに備える、請求項2に記載の電動ドライバ。
【請求項5】
前記電動モータの出力軸、前記ドライブシャフト、前記ビットホルダ、又はそれらを連結している部材の前記回転方向でのねじれを検出するようにされた磁歪式センサをさらに備える、請求項1に記載の電動ドライバ。
【請求項6】
前記電動モータと前記減速ギヤ機構とのうちの少なくとも一方を前記回転方向で固定する固定部と、当該電動ドライバを外部部材に取り付けるための取付部と、前記固定部と前記取付部の間のセンサ取付部と、を有するハウジングと、
前記センサ取付部に取り付けられた歪ゲージと、
をさらに備える、請求項1に記載の電動ドライバ。
【請求項7】
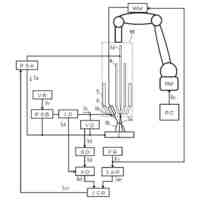
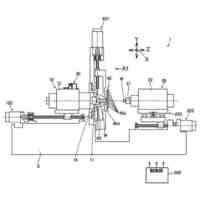
多自由度ロボットを有する自動機と、
前記多自由度ロボットの可動部に取り付けられた、請求項1乃至6のいずれか一項に記載の電動ドライバと、
を備える、自動機システム。
【請求項8】
請求項7に記載の自動機システムにおいて、螺合部材の締め付け動作のダイレクトティーチングを行なう方法であって、
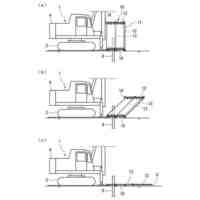
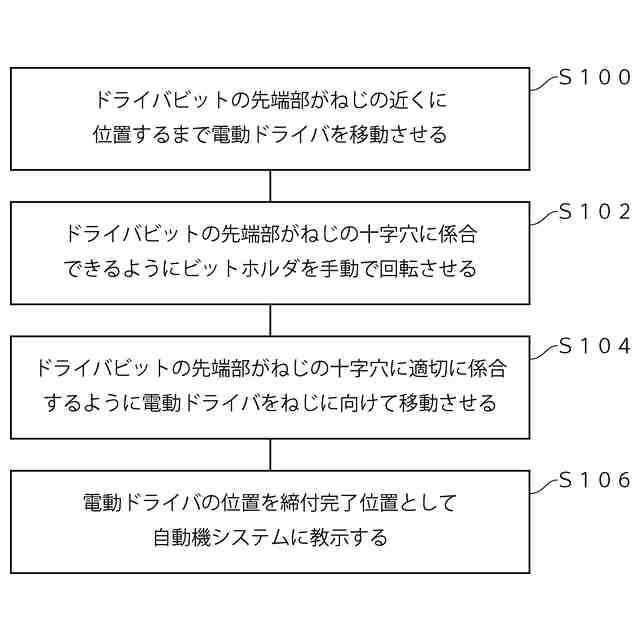
前記可動部を変位させながら前記電動ドライバを手動で移動させる工程であって、前記電動ドライバの前記ビットホルダに装着されたドライバビットの先端部が所定位置に螺合されている螺合部材に係合した締付完了位置にまで前記電動ドライバを移動させる工程を含み、
前記移動させる工程が、前記ドライバビットの先端部が前記螺合部材の締付用係合部に係合するように、前記ドライバビットを前記ビットホルダとともに前記所定の回転角の範囲内で前記ドライブシャフトに対して手動で回転させることを含む、方法。
【請求項9】
請求項7に記載の自動機システムで螺合部材の締め付けを行なう方法であって、
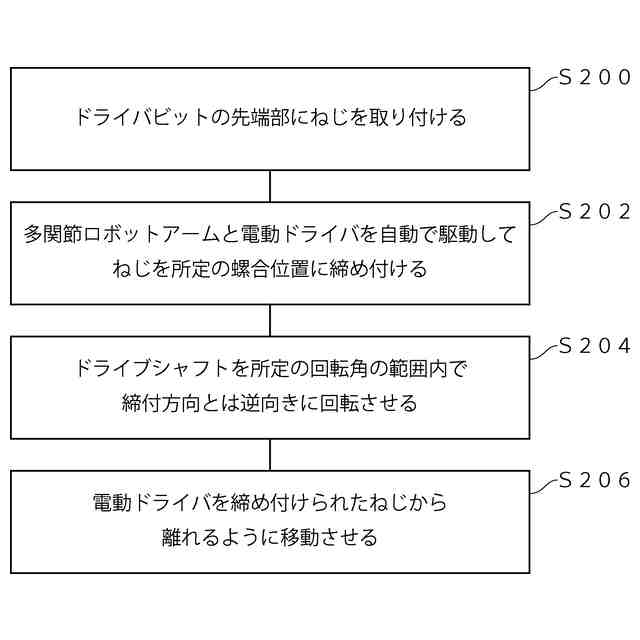
前記電動ドライバの前記ビットホルダに取り付けられたドライバビットに螺合部材を取り付ける工程と、
前記可動部と前記電動ドライバを自動で駆動して、前記螺合部材を所定の螺合位置に締め付ける工程と、
前記螺合部材が締め付けられた後に、前記ドライブシャフトを前記所定の回転角の範囲内で逆回転させて前記ドライブシャフトと前記ビットホルダとの間の前記回転方向での係合を解除する工程と、
を含む、方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動ドライバ、電動ドライバを備える自動機システム、並びに自動機システムのダイレクトティーチングを行なう方法及び自動機システムで螺合部材の締め付けを行なう方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
ねじ、六角ボルト、ナットなどの種々の螺合部材の締め付け作業を行なうための電動ドライバが知られている。このような電動ドライバは、例えば特許文献1に示されるように、自動機の多関節ロボットアームに取り付けられて使用されることがある。
【先行技術文献】
【特許文献】
【0003】
特開2022-146904号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
電動ドライバを自動機において使用する場合には、特に電動ドライバが多関節ロボットアーム等に固定されていることに伴って種々の問題が生じうる。例えば、多関節ロボットアームの動作をティーチング(教示)する際に多関節ロボットアームを手動で動かしてその動きを覚えさせるダイレクトティーチング(直接教示)を採用する場合、電動ドライバに取り付けたドライバビットの回転方向位置がねじの十字穴の向きに合っておらず、ドライバビットがねじの十字穴に適切に係合した位置にまで電動ドライバを移動させることができないという問題が生じうる。この場合には、手でドライバビットを回す必要があるが、通常、電動モータとドライバビットを保持しているビットホルダとの間には大きな減速比を有するギヤ構造体が配置されているため、ドライバビットを回すのには大きな力が必要となり、場合によってはドライバビットを手で回すことが実質的に不可能となる。また、電動ドライバで締付作業を行なった直後はドライバビットがねじの十字穴に回転方向で強く押し付けられた状態となっているため、そのままドライバビットをねじから離そうとすると、ねじがドライバビットに引っ張られ、それによりねじが締め付けられたワークがねじと共に移動してしまうという問題も生じうる。この場合には、ドライバビットをわずかに逆回転させることでドライバビットとねじの十字穴との回転方向での係合を解除することができる。しかしながら、逆方向への回転量が僅かにでも大きすぎると、ねじが逆方向に回転して緩められたり、ドライバビットとねじの十字穴が逆転方向で強く係合して結局ワークが動いてしまうことになったりする虞がある。ねじを緩めることなく係合を解除するためには、極めて精密なドライバビットの逆回転制御を行なう必要があるが、電動モータとドライバビットとの間にはギヤ構造体などの機械部品があり、それらのバックラッシュや遊びの影響もあって、上述の問題が生じないようにドライバビットを正確に逆転させることは難しい。
【0005】
そこで本発明は、自動機用の電動ドライバにおける上述のような問題のうちの少なくとも1つを解決することが可能な、電動ドライバ、電動ドライバを備える自動機システム、自動機システムのダイレクトティーチングを行なう方法、又は自動機システムで螺合部材の締め付けを行なう方法を提供する。
【課題を解決するための手段】
【0006】
すなわち本発明は、
自動機用の電動ドライバであって、
電動モータと、
前記電動モータに連結された減速ギヤ機構と、
前記減速ギヤ機構に連結され、前記減速ギヤ機構を介して前記電動モータによって回転軸線の周りで回転駆動されるドライブシャフトと、
前記回転軸線の周りで回転可能に保持され、前記ドライブシャフトに回転方向で係合して前記ドライブシャフトとともに回転するビットホルダと、
を備え、
前記ビットホルダは、所定の回転角の範囲内で前記ドライブシャフトに対して相対的に回転可能とされた、電動ドライバを提供する。
【0007】
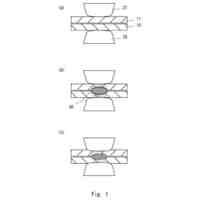
当該自動機用の電動ドライバにおいては、ビットホルダが所定の回転角の範囲内でドライブシャフトに対して相対的に回転可能となっている。これにより、例えば当該電動ドライバを自動機に取り付けた自動機システムのダイレクトティーチングを行なう際に、ビットホルダに装着されたドライバビットを手で回転させて、ねじの十字穴のような螺合部材の締付用係合部に適切に係合する向きとすることができる。よって、ダイレクトティーチングにおいて、ドライバビットが螺合部材の締付用係合部に適切に係合した位置にまで電動ドライバを移動させることが可能となる。また、自動機システムで螺合部材を締め付けた後に、ドライブシャフトを所定の回転角の範囲内で逆回転させることにより、実質的にドライブシャフトのみが回転してビットホルダは回転しないようにできるため、ドライバビットと螺合部材との間の回転方向での係合を容易に解除することが可能となる。
【0008】
また、
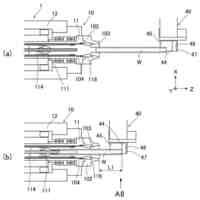
前記ドライブシャフトと前記ビットホルダが、前記回転軸線に沿って前後方向に並べて配置され、
前記ドライブシャフトが、前端面と、前記前端面から前方に突出した第1係合突部とを有し、
前記ビットホルダが、前記ドライブシャフトの前記前端面に面する後端面と、前記後端面から後方に突出する第2係合突部とを有し、
前記第1係合突部と前記第2係合突部とが前記回転方向で係合するようにすることができる。
【0009】
さらに、
前記第1係合突部が、前記回転軸線に対して対称な位置に配置された2つの扇形状突起を有し、各扇形状突起が前記回転軸線の放射方向に延びる2つの側面を有し、前記2つの側面の間の前記回転方向での角度が略45度であり、
前記第2係合突部が、前記回転軸線に対して対称な位置に配置された2つの扇形状突起を有し、各扇形状突起が前記回転軸線の放射方向に延びる2つの側面を有し、前記2つの側面の間の前記回転方向での角度が略45度であり、
前記第1係合突部の前記側面と前記第2係合突部の前記側面とが前記回転方向で係合するようにすることができる。
【0010】
さらに、前記ドライブシャフトと前記ビットホルダとの間に配置され、前記ドライブシャフトと前記ビットホルダとが前記回転軸線の方向で直接接触しないようにするスペーサをさらに備えるようにできる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東工器株式会社
手指リハビリ用具
2か月前
日東工器株式会社
電動ドライバ及び自動機システム、並びに自動機システムのダイレクトティーチングを行う方法及び自動機システムで螺合部材の締め付けを行なう方法
4日前
個人
スラッジ除去装置
1か月前
日東精工株式会社
ねじ締め装置
4日前
株式会社FUJI
工作機械
20日前
個人
複合金属回転式ホーン
1か月前
株式会社FUJI
工作機械
1か月前
有限会社津谷工業
切削工具
3か月前
株式会社ダイヘン
積層造形溶接方法
24日前
株式会社ツガミ
工作機械
1か月前
トヨタ自動車株式会社
検査方法
1か月前
株式会社トーキン
溶接用トーチ
1か月前
株式会社ナベヤ
締結装置
24日前
トヨタ自動車株式会社
取付装置
1か月前
トヨタ自動車株式会社
積層コア
2か月前
株式会社ツガミ
工作機械
1か月前
株式会社メドメタレックス
ドリル
2か月前
株式会社不二越
歯車研削盤
3か月前
オークマ株式会社
工作機械
10日前
株式会社オーエム製作所
工作機械
1か月前
オークマ株式会社
診断装置
10日前
株式会社不二越
歯車研削盤
1か月前
株式会社不二越
歯車加工機
3か月前
大和ハウス工業株式会社
溶接方法
5日前
三菱電機株式会社
ねじ取り出し装置
2か月前
株式会社浪速試錐工業所
防風カバー
3か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接トーチ
1か月前
豊田鉄工株式会社
レーザー溶接装置
今日
株式会社ヤマダスポット
抵抗溶接機
3か月前
株式会社FUJI
自動化用パレット
2か月前
株式会社関本管工
エルボ管保持装置
1か月前
住友重機械工業株式会社
レーザ装置
3か月前
スター精密株式会社
工作機械
4日前
サムテック株式会社
加工物製造方法
2か月前
トヨタ自動車株式会社
位相測定方法
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ