TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025032760
公報種別
公開特許公報(A)
公開日
2025-03-12
出願番号
2023138225
出願日
2023-08-28
発明の名称
把持装置及び把持方法
出願人
株式会社牧野フライス製作所
代理人
個人
,
個人
,
個人
,
個人
主分類
B23Q
3/06 20060101AFI20250305BHJP(工作機械;他に分類されない金属加工)
要約
【課題】任意形状のワークを把持することができる把持装置及び把持方法を提供する。
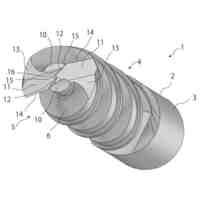
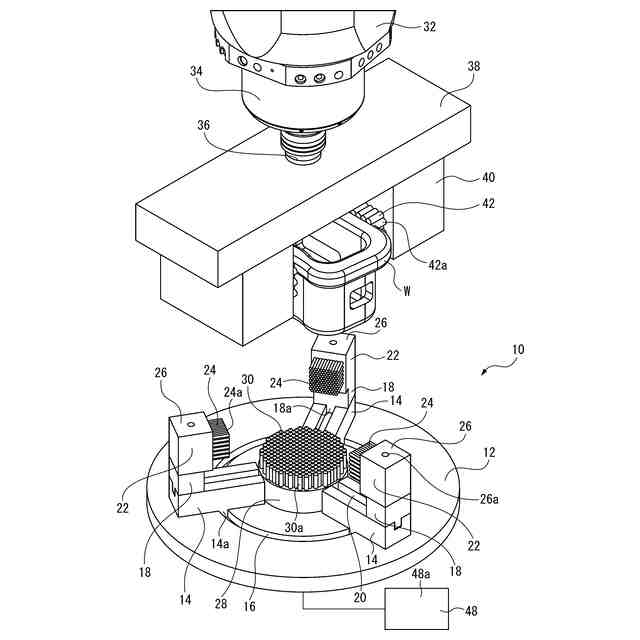
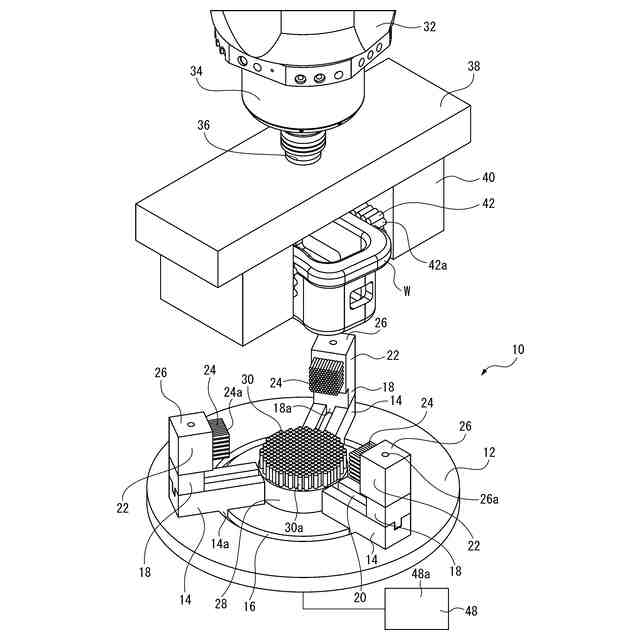
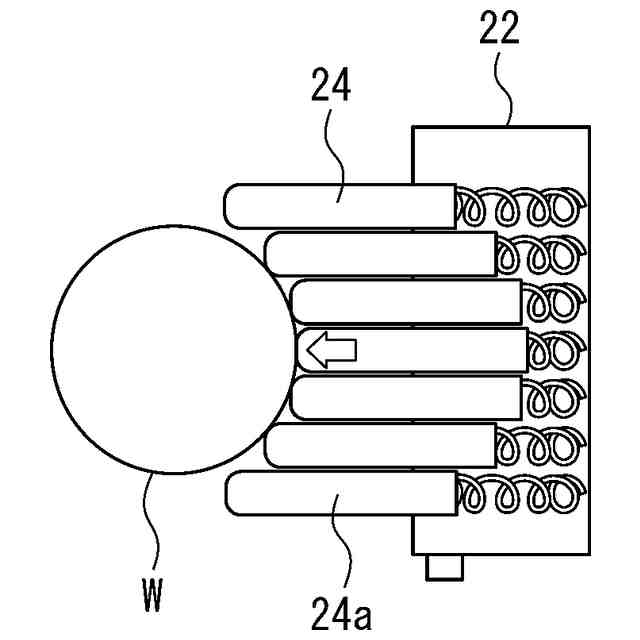
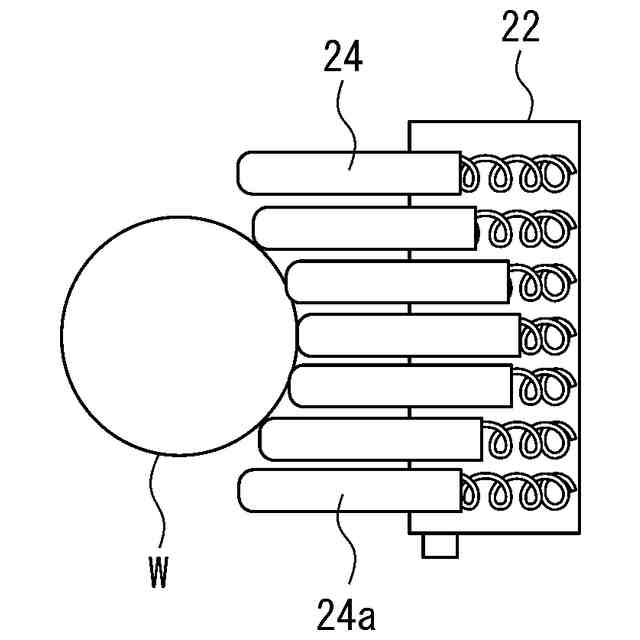
【解決手段】把持装置10は、基台12と、基台12の径方向に沿って延在し、その軸線周りに回動可能な回動部14と、回動部14上を基台12の径方向に移動可能な案内部18と、案内部18上で回転可能なベース22と、ベース22において基台12の径方向内側に配置され、複数のピン24aを備えるクランプ爪24と、ベース22に配置され、複数のピン24aと接続されたチャンバ60を加圧する微動機構部26と、を備え、ワークWの形状データを含むワーク情報に基づいて、回動部14を基台12の軸線周りに回動させると共に案内部18を基台12の径方向に沿って移動させ、ベース22及びクランプ爪24を回転させ、微動機構部26によってクランプ爪24の複数のピン24aをワークWの形状に倣い押し当てることを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
任意形状のワークを複数のクランプ爪を用いて把持する把持装置であって、
基台と、
前記基台上に配置され、前記基台の径方向に沿って延在し、前記基台の軸線周りに回動可能に構成された回動部と、
前記回動部上に配置され、前記基台の径方向に沿って移動可能な案内部と、
前記案内部上に回転可能に配置されたベースと、
前記ベースにおいて、前記基台の径方向内側に配置され、複数のピンを有する前記クランプ爪と、
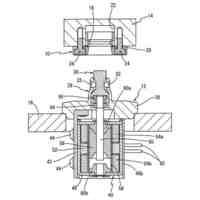
前記ベースに配置され、圧力流体を収容すると共に複数の前記ピンと接続されたチャンバを有し、前記チャンバを加圧する微動機構部と、を備え、
前記ワークの形状データを含むワーク情報に基づいて、前記回動部を前記基台の軸線周りに回動させると共に前記案内部を前記基台の径方向に沿って移動させ、前記ベース及び前記クランプ爪を回転させ、前記微動機構部によって前記クランプ爪の複数の前記ピンを前記ワークの形状に倣い押し当てる、ことを特徴とする把持装置。
続きを表示(約 1,100 文字)
【請求項2】
前記クランプ爪は、前記ワークのクランプ力を変更可能な力覚センサを備える、請求項1に記載の把持装置。
【請求項3】
前記微動機構部は、前記チャンバの加圧を調整するためのネジを有する、請求項2に記載の把持装置。
【請求項4】
前記ベースは、上下動可能に構成されている、請求項3に記載の把持装置。
【請求項5】
前記ワーク情報は、前記ワークの材質、前記ワークの加工に用いる工具、及び、該工具を用いて行う前記ワークの加工条件の情報を含む、請求項4に記載の把持装置。
【請求項6】
互いに直交する3つの直動送り軸と少なくとも2つの回転送り軸とを有する工作機械において、請求項1から請求項5の何れか1項に記載の把持装置を用いて任意形状のワークを把持する把持方法であって、
前記把持装置は、前記ワークの形状データを含むワーク情報を記憶する記憶部を備え、
(i)前記記憶部に記憶された前記ワーク情報に基づいて、前記工作機械の主軸頭が前記ワークを前記把持装置まで移動することと、
(ii)前記ワーク情報に基づいて、前記回動部を前記基台の軸線周りに回動させ、前記基台の周方向における前記クランプ爪の位置決めをすることと、
(iii)前記ワーク情報に基づいて、前記案内部を前記基台の径方向に沿って移動させ、前記基台の径方向における前記クランプ爪の位置決めをすることと、
(iv)前記ワーク情報に基づいて、前記クランプ爪の複数の前記ピンを前記チャンバによって加圧し、前記ワークの形状に倣い押し当てることと、
を含む、任意形状のワークを把持する把持方法。
【請求項7】
前記記憶部に記憶された前記ワーク情報に基づいて、前記基台の周方向における前記クランプ爪の位置決めをする、請求項6に記載の任意形状のワークを把持する把持方法。
【請求項8】
前記記憶部に記憶された前記ワーク情報に基づいて、前記基台の径方向における前記クランプ爪の位置決めをする、請求項7に記載の任意形状のワークを把持する把持方法。
【請求項9】
前記ピンが前記ワークに近接する位置まで前記クランプ爪を移動させた後に、前記チャンバを加圧して前記ピンを前記ワークの形状に倣って押し当てる、請求項8に記載の任意形状のワークを把持する把持方法。
【請求項10】
前記工作機械の前記主軸頭を用いて、前記基台の径方向及び周方向に沿って前記ワークを移動させることによって、前記ワークの前記クランプ爪に対する位置を調整する、請求項9に記載の任意形状のワークを把持する把持方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持装置及び把持方法に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
自動的に機械加工を行う上で、被加工物を工作機械に安定して取り付けることや工作機械に対して安定して固定することが必要とされる。一方、被加工物は、加工目的に応じて形状や大きさが異なる場合があり、配送用の貨物等のように定型ではないため、例えば、アームで両側から挟み込むように把持しても、被加工物を安定して把持できない可能性がある。このため、特許文献1には、工作機械を使用して機械加工される回転対称のワークピースを支持するためのチャックであって、チャック本体と、少なくとも3つのクランプジョーと、駆動手段としての電動モータと、制御ユニットとを備えるチャックが開示されている。また、特許文献2には、種々の形状の物体を把持する把持ヘッドであって、ベースと、ベースにおいて把持方向に直線的にガイドされ、フレーム及び把持方向に沿って変位可能な複数のピンを備える把持ジョーを備える把持ヘッドが開示されている。
【0003】
しかしながら、特許文献1に記載されたクランプジョーや特許文献2に記載された把持ヘッドは、被加工物の径方向に沿って移動することはできるものの、被加工物の周方向に沿って移動することはできない。このため、これらの把持装置は、例えば、大きさの異なる相似形状の被加工物を把持することができたとしても、外周形状が大きく異なる被加工物を把持することが困難になる可能性がある。また、被加工物の剛性が部位によって異なる場合に、剛性の低い箇所を避けて把持することが困難になる場合がある。
【先行技術文献】
【特許文献】
【0004】
特許第6594100号
特許第6725808号
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、任意形状のワークを把持することができる把持装置及び把持方法を提供することである。
【課題を解決するための手段】
【0006】
本発明によれば、任意形状のワークを複数のクランプ爪を用いて把持する把持装置であって、基台と、基台上に配置され、基台の径方向に沿って延在し、基台の軸線周りに回動可能に構成された回動部と、回動部上に配置され、基台の径方向に沿って移動可能な案内部と、案内部上に回転可能に配置されたベースと、ベースにおいて、基台の径方向内側に配置され、複数のピンを有するクランプ爪と、ベースに配置され、圧力流体を収容すると共に複数のピンと接続されたチャンバを有し、チャンバを加圧する微動機構部と、を備え、前記ワークの形状データを含むワーク情報に基づいて、回動部を基台の軸線周りに回動させると共に案内部を基台の径方向に沿って移動させ、ベース及びクランプ爪を回転させ、微動機構部によってクランプ爪の複数のピンをワークの形状に倣い押し当てる、ことを特徴とする把持装置が提供される。
【0007】
また、本発明によれば、互いに直交する3つの直動送り軸と少なくとも2つの回転送り軸とを有する工作機械において、本発明の把持装置を用いて任意形状のワークを把持する把持方法であって、把持装置は、ワークの形状データを含むワーク情報を記憶する記憶部を備え、(i)記憶部に記憶されたワーク情報に基づいて、工作機械の主軸頭がワークを把持装置まで移動することと、(ii)ワーク情報に基づいて、回動部を基台の軸線周りに回動させ、基台の周方向におけるクランプ爪の位置決めをすることと、(iii)ワーク情報に基づいて、案内部を基台の径方向に沿って移動させ、基台の径方向におけるクランプ爪の位置決めをすることと、(iv)ワーク情報に基づいて、クランプ爪の複数のピンをチャンバによって加圧し、ワークの形状に倣い押し当てることと、を含む、任意形状のワークを把持する把持方法が提供される。
【発明の効果】
【0008】
本発明に係る把持装置によれば、基台と、基台上に配置され、基台の径方向に沿って延在し、基台の軸線周りに回動可能に構成された回動部と、回動部上に配置され、基台の径方向に沿って移動可能な案内部と、案内部上に回転可能に配置されたベースと、ベースにおいて、基台の径方向内側に配置され、複数のピンを有するクランプ爪と、を備える。このため、回動部を基台の軸線周りに回動させることによってクランプ爪を基台の周方向に沿って回動させ、回動部上の案内部を基台の径方向に沿って移動させることによってクランプ爪を基台の径方向に沿って移動させることができる。さらに、ベース及びクランプ爪を回転させることによって、ワークに対するクランプ爪の向きを調整することができる。これによって、ワークの形状データを含むワーク情報に基づいて、ワークに対するクランプ爪の位置を調整することができる。さらに、クランプ爪には、圧力流体を収容すると共に複数のピンと接続されたチャンバを有し、チャンバを加圧する微動機構部が配置されている。このため、ワークの形状や剛性に対応して、クランプ爪の複数のピンの出し入れを調整し、これらをワークの形状に倣い押し当てることができる。これらによって、本発明に係る把持装置は、任意形状のワークを把持することができる。
【0009】
また、本発明に係る把持方法によれば、把持装置は、ワークの形状データを含むワーク情報を記憶する記憶部を備え、記憶部に記憶されたワーク情報に基づいて、工作機械の主軸頭がワークを把持装置まで移動させることができる。さらに、ワーク情報に基づいて、主軸頭が移動したワークの位置に合わせて、回動部を基台の軸線周りに回動させ、基台の周方向におけるクランプ爪の位置決めをすることができると共に、案内部を基台の径方向に沿って移動させ、基台の径方向におけるクランプ爪の位置決めをすることができる。これによって、ワークの形状に応じて、ワークに対するクランプ爪の位置を調整することができる。さらに、クランプ爪の複数のピンをチャンバによって加圧し、ワークの形状に倣い押し当てることができる。このように、本発明に係る把持方法は、任意形状のワークを把持することができる。
【図面の簡単な説明】
【0010】
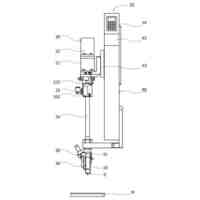
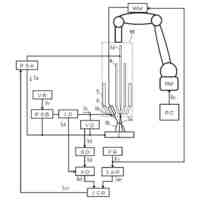
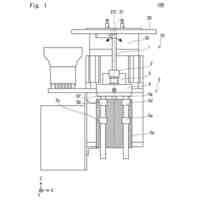
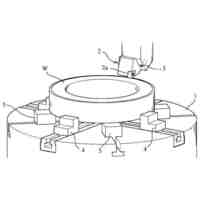
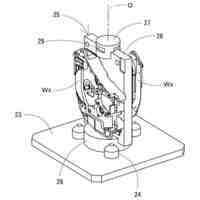
図1は、第1実施形態に係る把持装置の斜視図を示す。
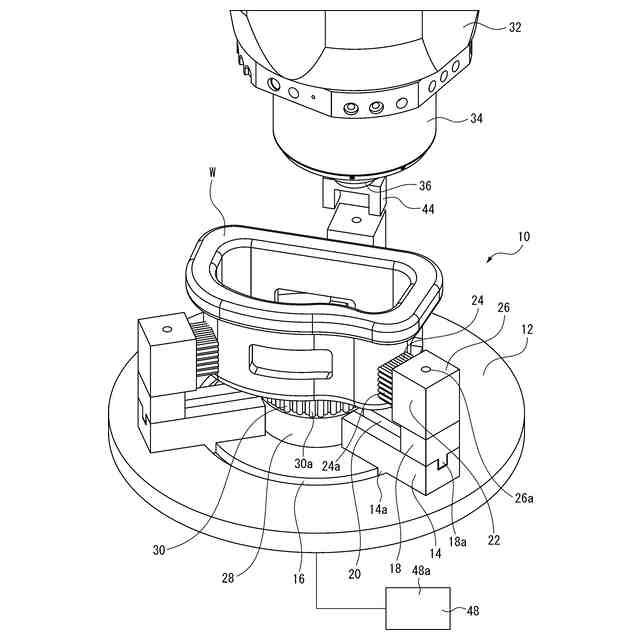
図2は、ワークに対する位置を調整する把持装置の斜視図を示す。
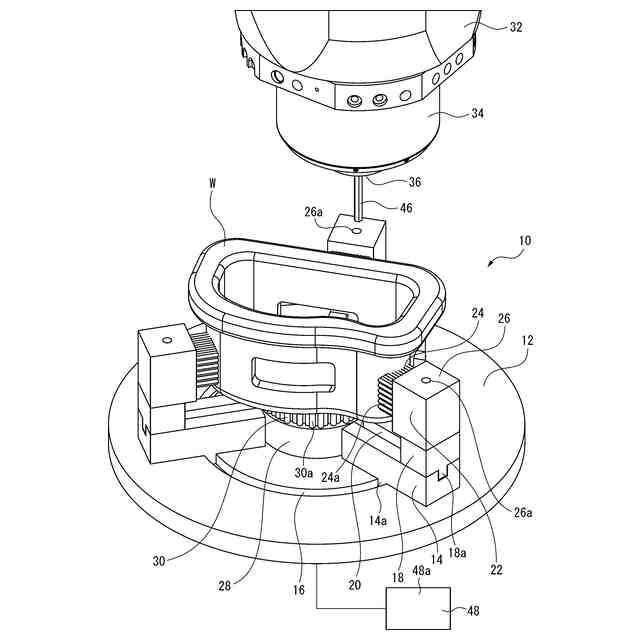
図3は、ワークのクランプ位置を固定した把持装置の斜視図を示す。
図4は、クランプ爪のワークに対する位置調整の模式図を示す。
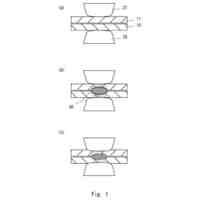
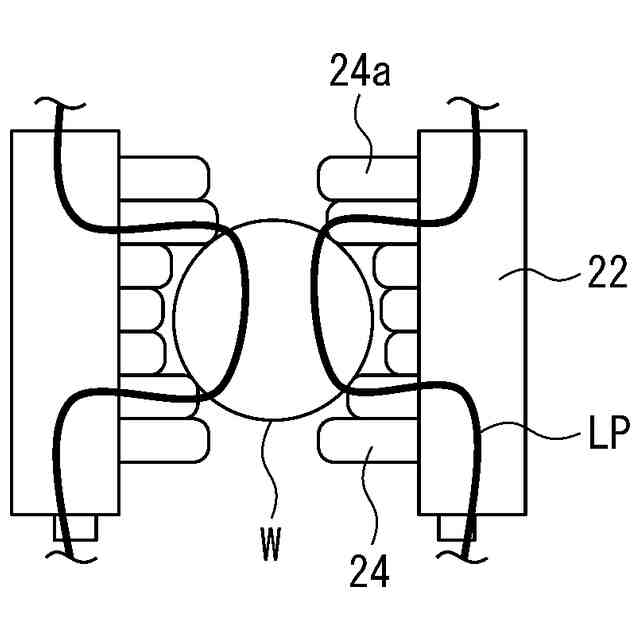
図5Aは、クランプ爪のピンのワークに対する位置調整の模式図を示す。
図5Bは、クランプ爪のピンのワークに対する位置調整の模式図を示す。
図5Cは、クランプ爪のピンのワークに対する位置調整の模式図を示す。
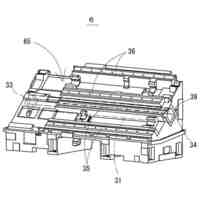
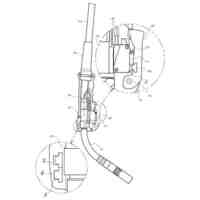
図6は、把持装置の変形例の模式図を示す。
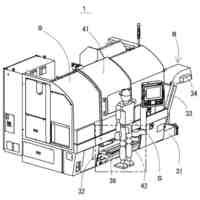
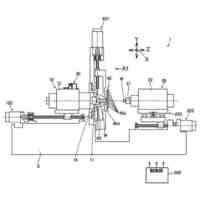
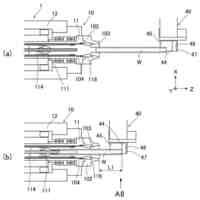
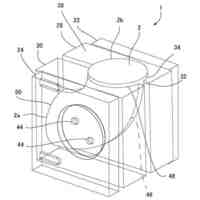
図7は、第2実施形態に係る把持装置の斜視図を示す。
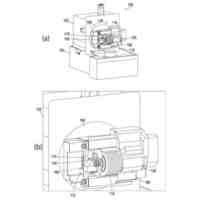
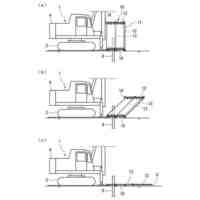
図8(a)から図8(c)は、把持したワークの3面加工を行うために姿勢を変更する把持装置の斜視図を示す。
図9(a)から図9(c)は、ワークの段取り替えを行う把持装置の斜視図を示す。
図10は、側面の加工終了後のワークを取り外した把持装置の斜視図を示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
スラッジ除去装置
1か月前
日東精工株式会社
ねじ締め装置
4日前
個人
複合金属回転式ホーン
1か月前
有限会社津谷工業
切削工具
3か月前
株式会社FUJI
工作機械
20日前
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
積層造形溶接方法
24日前
株式会社ツガミ
工作機械
1か月前
トヨタ自動車株式会社
積層コア
2か月前
トヨタ自動車株式会社
取付装置
1か月前
トヨタ自動車株式会社
検査方法
1か月前
株式会社ツガミ
工作機械
1か月前
株式会社ナベヤ
締結装置
24日前
株式会社トーキン
溶接用トーチ
1か月前
大和ハウス工業株式会社
溶接方法
5日前
株式会社オーエム製作所
工作機械
1か月前
株式会社メドメタレックス
ドリル
2か月前
オークマ株式会社
工作機械
10日前
オークマ株式会社
診断装置
10日前
株式会社不二越
歯車加工機
3か月前
株式会社不二越
歯車研削盤
1か月前
株式会社不二越
歯車研削盤
3か月前
サムテック株式会社
加工物製造方法
2か月前
株式会社浪速試錐工業所
防風カバー
3か月前
トヨタ自動車株式会社
位相測定方法
2か月前
住友重機械工業株式会社
レーザ装置
3か月前
三菱電機株式会社
ねじ取り出し装置
2か月前
豊田鉄工株式会社
レーザー溶接装置
今日
株式会社FUJI
自動化用パレット
2か月前
株式会社関本管工
エルボ管保持装置
1か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ヤマダスポット
抵抗溶接機
3か月前
株式会社ダイヘン
溶接トーチ
1か月前
スター精密株式会社
工作機械
4日前
株式会社不二越
工具の製造方法
2か月前
工機ホールディングス株式会社
作業機
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ