TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025032538
公報種別
公開特許公報(A)
公開日
2025-03-12
出願番号
2023137855
出願日
2023-08-28
発明の名称
設備情報取得システム、飛行制御システム、及び設備情報取得方法
出願人
中国電力株式会社
代理人
弁理士法人一色国際特許事務所
主分類
G05D
1/46 20240101AFI20250305BHJP(制御;調整)
要約
【課題】無人航空機を用いて設備の情報を効率よく安全に取得する。
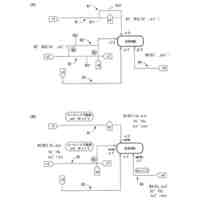
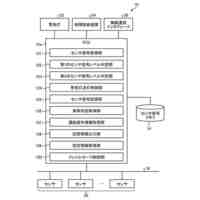
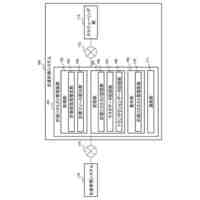
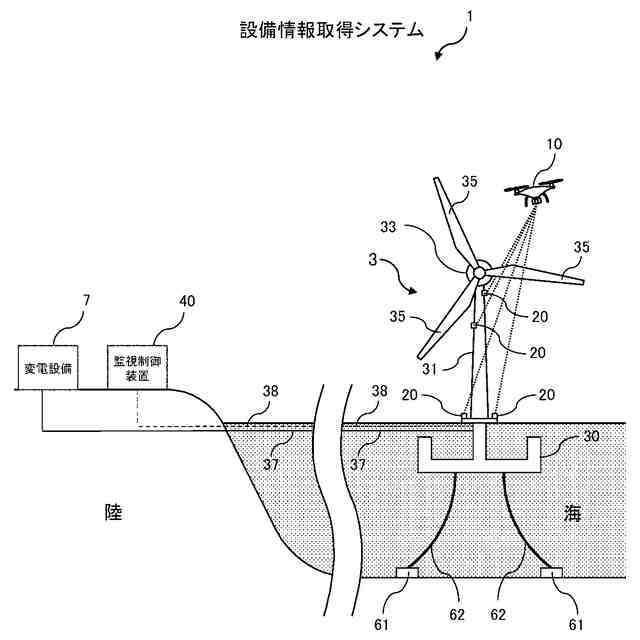
【解決手段】設備情報取得システムは、無人航空機と、設備の異なる4つ以上の部位の夫々に設けられた複数の基準局と、情報処理装置と、を含み、無人航空機は、飛行制御装置、第1高精度時計、第1無線通信装置、及び情報取得装置を備え、複数の基準局は夫々、第2高精度時計及び第2無線通信装置を備え、情報処理装置は、飛行制御装置と通信可能に接続し、第1無線通信装置と基準局の夫々の第2無線通信装置との間の電波の伝搬時間を時空間同期技術により取得し、基準局の夫々について取得した伝搬時間に基づき、無人航空機と設備との間の相対的な位置関係を取得し、飛行制御装置は、取得した位置関係に基づき、無人航空機が設備に対して所定の相対的な位置関係となるように制御する。
【選択図】図9
特許請求の範囲
【請求項1】
無人航空機と、
情報の取得対象となる設備における4つ以上の異なる部位の夫々に設けられた複数の基準局と、
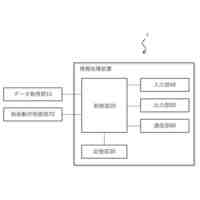
プロセッサ及び記憶装置を有する情報処理装置と、
を含み、
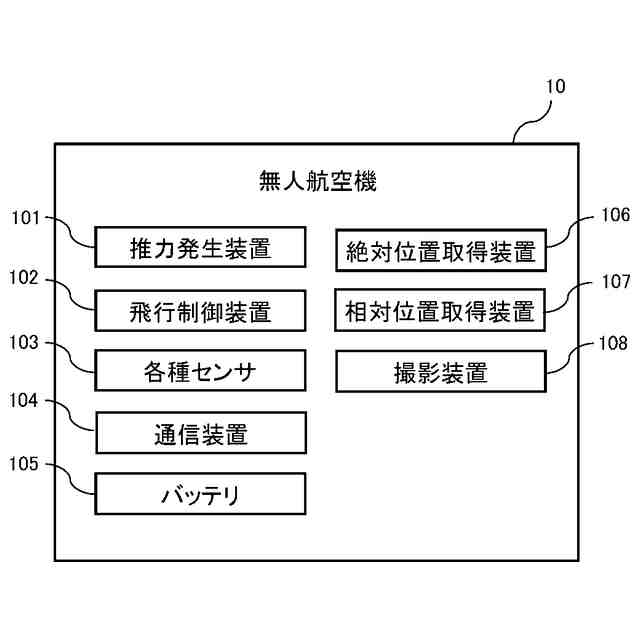
前記無人航空機は、飛行制御装置、第1高精度時計、第1無線通信装置、及び前記設備の情報を取得する情報取得装置を備え、
前記複数の基準局は夫々、第2高精度時計及び第2無線通信装置を備え、
前記情報処理装置は、
有線通信又は無線通信により前記飛行制御装置と通信可能に接続し、
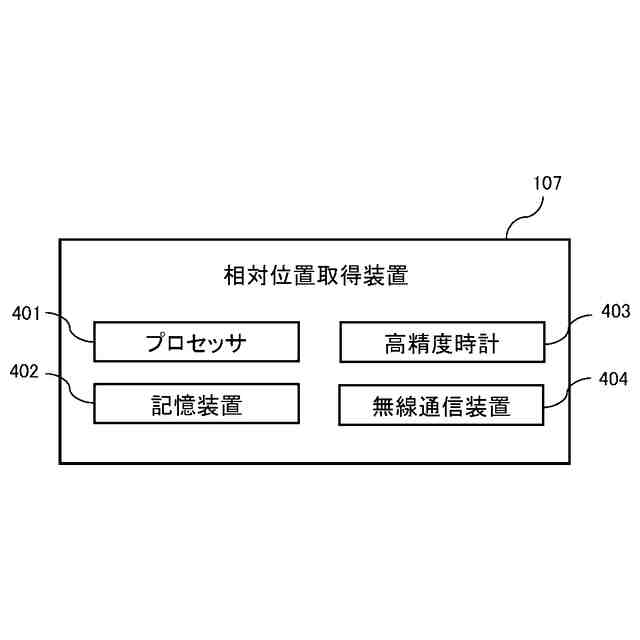
前記第1無線通信装置と前記基準局の夫々の前記第2無線通信装置との間の電波の伝搬時間を時空間同期技術により取得し、
前記基準局の夫々について取得した前記伝搬時間に基づき、前記無人航空機と前記設備との間の相対的な位置関係を取得し、
前記飛行制御装置は、前記位置関係に基づき、前記無人航空機が前記設備に対して所定の相対的な位置関係となるように制御する、
設備情報取得システム。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の設備情報取得システムであって、
前記情報処理装置は、
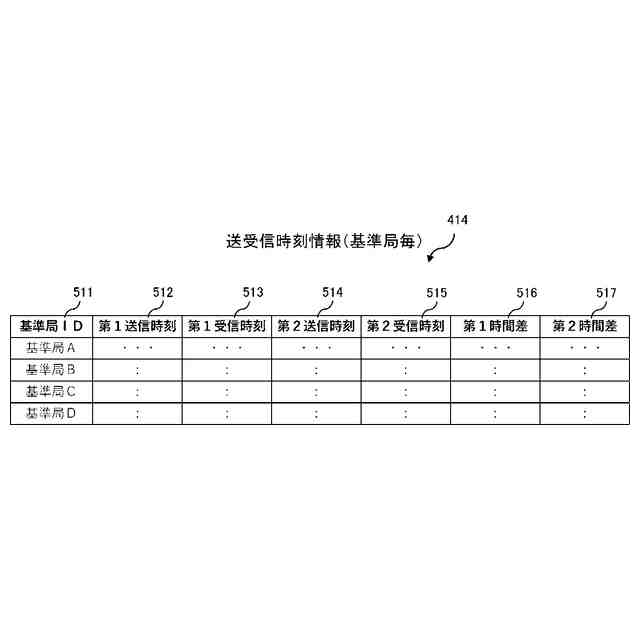
前記第1無線通信装置から送信した電波の送信時刻である第1送信時刻を前記第1高精度時計により取得し、
前記第2無線通信装置による前記電波の受信時刻である第1受信時刻を前記第2高精度時計により取得し、
前記第2無線通信装置から送信した電波の送信時刻である第2送信時刻を前記第2高精度時計により取得し、
前記第1無線通信装置による前記電波の受信時刻である第2受信時刻を前記第1高精度時計により取得し、
前記第1受信時刻と前記第1送信時刻の時間差である第1時間差と、前記第2受信時刻と前記第2送信時刻の時間差である第2時間差とに基づき、前記伝搬時間を求める、
設備情報取得システム。
【請求項3】
請求項1に記載の設備情報取得システムであって、
前記設備は、洋上風力発電設備である、
設備情報取得システム。
【請求項4】
請求項1に記載の設備情報取得システムであって、
前記情報取得装置は、前記設備の点検の対象となる部位を撮影する撮影装置である、
設備情報取得システム。
【請求項5】
請求項1に記載の設備情報取得システムであって、
前記情報処理装置は、前記無人航空機に搭載されている、
設備情報取得システム。
【請求項6】
請求項1に記載の設備情報取得システムであって、
前記無人航空機は、マルチコプタ又はヘリコプタである、
設備情報取得システム。
【請求項7】
無人航空機と、
情報の取得対象となる設備における4つ以上の異なる部位の夫々に設けられた複数の基準局と、
プロセッサ及び記憶装置を有する情報処理装置と、
を含み、
前記無人航空機は、飛行制御装置、第1高精度時計、及び第1無線通信装置を備え、
前記複数の基準局は夫々、第2高精度時計及び第2無線通信装置を備え、
前記情報処理装置は、
有線通信又は無線通信により前記飛行制御装置と通信可能に接続し、
前記第1無線通信装置と前記基準局の夫々の前記第2無線通信装置との間の電波の伝搬時間を時空間同期技術により取得し、
前記基準局の夫々について取得した前記伝搬時間に基づき、前記無人航空機と前記設備との間の相対的な位置関係を取得し、
前記飛行制御装置は、前記位置関係に基づき、前記無人航空機が前記設備に対して所定の相対的な位置関係となるように制御する、
飛行制御システム。
【請求項8】
無人航空機と、
情報の取得対象となる設備における4つ以上の異なる部位の夫々に設けられた複数の基準局と、
プロセッサ及び記憶装置を有する情報処理装置と、
を含み、
前記無人航空機が、飛行制御装置、第1高精度時計、第1無線通信装置、及び前記設備の情報を取得する情報取得装置を備え、
前記複数の基準局が夫々、第2高精度時計及び第2無線通信装置を備えて構成され、
前記情報処理装置が、有線通信又は無線通信により前記飛行制御装置と通信可能に接続する、
設備情報取得システムの制御方法であって、
前記情報処理装置が、
前記第1無線通信装置と前記基準局の夫々の前記第2無線通信装置との間の電波の伝搬時間を時空間同期技術により取得するステップ、
前記基準局の夫々について取得した前記伝搬時間に基づき、前記無人航空機と前記設備との間の相対的な位置関係を取得するステップ、及び
前記飛行制御装置が、前記位置関係に基づき、前記無人航空機が前記設備に対して所定の相対的な位置関係となるように制御するステップ、
を実行する、設備情報取得システムの制御方法。
【請求項9】
請求項8に記載の設備情報取得システムの制御方法であって、
前記情報処理装置が、
前記第1無線通信装置から送信した電波の送信時刻である第1送信時刻を前記第1高精度時計により取得するステップ、
前記第2無線通信装置による前記電波の受信時刻である第1受信時刻を前記第2高精度時計により取得するステップ、
前記第2無線通信装置から送信した電波の送信時刻である第2送信時刻を前記第2高精度時計により取得するステップ、
前記第1無線通信装置による前記電波の受信時刻である第2受信時刻を前記第1高精度時計により取得するステップ、及び、
前記第1受信時刻と前記第1送信時刻の時間差である第1時間差と、前記第2受信時刻と前記第2送信時刻の時間差である第2時間差とに基づき、前記伝搬時間を求めるステップ、
を実行する、設備情報取得システムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、設備情報取得システム、飛行制御システム、及び設備情報取得方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
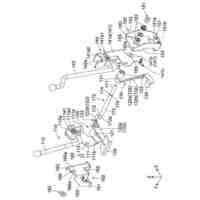
昨今、カーボンニュートラルの実現や再生エネルギーの主力電源化等を目的として洋上風力発電の導入が進んでいる。現状、洋上に設置された風力発電設備の点検は、ブレードの回転を停止させた後、作業員がロープ等を用いてブレードの表面に近づき目視により行われており、点検作業の効率向上や安全性の確保等を目的とした様々な技術が提案されている。
【0003】
例えば、特許文献1には、洋上の遠距離にある風力発電設備を自律飛行する無人航空機により点検する方法について記載されている。この方法では、無人航空機を風車の上空まで自律飛行させ、風車の上空においてナセルの現時点の方位を判定し、判定したナセルの現時点の方位に基づき無人航空機をハブに正対する位置に移動させ、第1ブレードの現時点の回転角度を判定する。そして、判定した回転角度に基づき、無人航空機を第1ブレードの点検開始位置に移動させ、無人航空機を点検開始位置から第1ブレードの長手方向に沿って移動させつつ、搭載されたカメラによって第1ブレードの点検用画像を撮影する。
【0004】
また、例えば、特許文献2には、強風によって風車のブレードが回転している場合でも、無人航空機に搭載したカメラを用いてブレードを適切に外観点検できるようにすることを目的として立案された風力発電設備の点検方法について記載されている。この点検方法では、風車のナセルに取り付けられた測距センサの検出データを利用して風車のブレードの回転軸まわりの角度を定期的に判定し、現時点までのブレードの回転軸まわりの角度の変化に基づき現時点から所定時間後までのブレードの回転角を推定する。そして、現時点のブレードの回転軸まわりの角度及び推定されたブレードの回転角に基づき現時点から所定時間後までのブレードに沿った無人航空機の飛行経路を決定し、決定された飛行経路に従って無人航空機を飛行させつつ、無人航空機に搭載されたカメラにブレードを撮影させる。
【先行技術文献】
【特許文献】
【0005】
特開2022-108420号公報
特開2023-42263号公報
【非特許文献】
【0006】
電波による相対距離測定に基づいた屋内位置推定(安倍北斗,廣津登志夫)、情報処理学会第81回全国大会、3-279頁
"Demonstration of wireless two-way interferometry(Wi-Wi)";Nobuyasu Shiga, Kohta Kido, Satoshi Yasuda, Bhola Panta ,Yuko Hanado, Seiji Kawamura, Hiroshi Hanado,Kenichi Takizawa,Masugi Inoue; IEICE Communications Express, Vol.6, No.2,77-82
【発明の概要】
【発明が解決しようとする課題】
【0007】
洋上に風力発電設備を設置する方法としては、海底に基礎構造物(杭等)を設置してその上に風車を乗せる「着床式」と、浮体の上に風車を乗せる「浮体式」がある。ここで上記の特許文献のように無人航空機を用いて風力発電設備の情報を取得しようとした場合、無人航空機と風力発電設備の接触や衝突を確実に防ぐ必要があるが、「浮体式」については、波浪や海流、風況等により風車が移動するため、無人航空機を用いて点検を行う際は、風車の予期せぬ動きに無人航空機を追従させて飛行させる必要があり、高度な制御技術が要求される。また、「着床式」の場合でも、風力発電設備の運用中、風車はブレードの正面が風上を向くように随時制御されるため、「浮体式」と同様の制御が必要になる。
【0008】
上記の特許文献1では、風車のナセルに取り付けられた測距センサの検出データを利用して現時点から所定時間後までのブレードの回転角を推定し、時点から所定時間後までのブレードに沿った無人航空機の飛行経路を決定する。しかし、波浪や海流、風況等による風力発電設備の予期しない動きに合わせて測距センサの向きを迅速に追従させることは難しく実現性に乏しい。
【0009】
また、特許文献1では、GPS(Global Positioning System)やINS(Inertial Navigation System)を用いて自己位置を特定しているため、自己位置特定の精度が必ずしも十分でなく、無人航空機を風力発電設備の周囲を安全に飛行させることは難しい。
【0010】
本発明は、このような背景に鑑みてなされたものであり、無人航空機を用いて設備の情報を効率よく安全に取得することが可能な、設備情報取得システム、飛行制御システム、及び設備情報取得方法を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
制御装置
1か月前
コフロック株式会社
流量制御装置
1か月前
株式会社丸和製作所
入力機器
1か月前
スター精密株式会社
工作機械
今日
株式会社豊田自動織機
荷役車両
26日前
株式会社フジキン
流量制御装置
1か月前
株式会社シンテックホズミ
搬送ロボット
15日前
国立大学法人広島大学
モデル誤差抑制補償器
5日前
株式会社ダイフク
物品搬送設備
19日前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
トヨタ自動車株式会社
自律走行装置
5日前
ローム株式会社
半導体装置
5日前
ミツミ電機株式会社
電源回路及びその起動方法
5日前
日本精工株式会社
制御システムおよび制御方法
5日前
ブラザー工業株式会社
調整方法及び数値制御装置
27日前
株式会社FUJI
工作機械
1か月前
ローム株式会社
定電圧生成回路
19日前
株式会社シマノ
人力駆動車の操作装置
26日前
アズビル株式会社
保全システム
26日前
株式会社エイトノット
情報処理システム
9日前
株式会社デジタルカレッジKAGA
物体搬送システム
19日前
大阪瓦斯株式会社
二次圧制御機構、及び制御方法
12日前
株式会社クボタ
フロントローダの操作機構及び作業車両
23日前
富士電機株式会社
制御装置、制御方法、及びプログラム
13日前
トヨタ自動車株式会社
管理システム
19日前
ダイハツ工業株式会社
車両用診断装置
19日前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
5日前
株式会社丸山製作所
乗用管理機および操作ユニット
1か月前
NTN株式会社
制御装置、および制御方法
23日前
株式会社エイトノット
移動経路生成システム
9日前
株式会社日立製作所
生産計画方法及び生産計画システム
26日前
オムロン株式会社
制御システム、設計装置、および設計プログラム
1か月前
ブラザー工業株式会社
工作機械、制御方法、及びプログラム
今日
株式会社日立インダストリアルプロダクツ
搬送システム
5日前
トヨタ自動車株式会社
移動体運行管理装置
5日前
トヨタ自動車株式会社
ソーラー発電制御装置
6日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ