TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025031708
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2024173364,2023137454
出願日
2024-10-02,2023-08-25
発明の名称
溶接システム
出願人
日鉄エンジニアリング株式会社
,
日鉄溶接工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B23K
9/10 20060101AFI20250228BHJP(工作機械;他に分類されない金属加工)
要約
【課題】複数の溶接ロボットを同時に操作することができる溶接システムを提供すること。
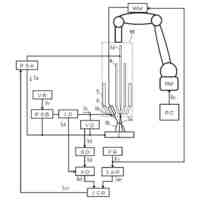
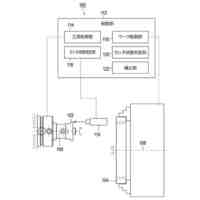
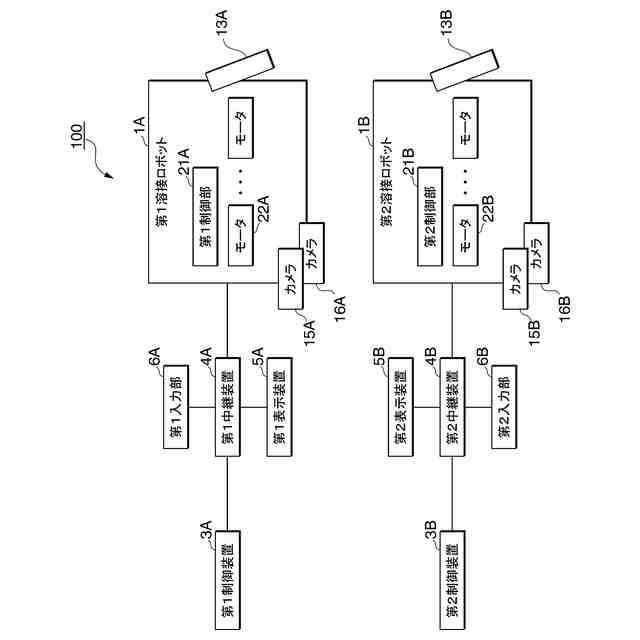
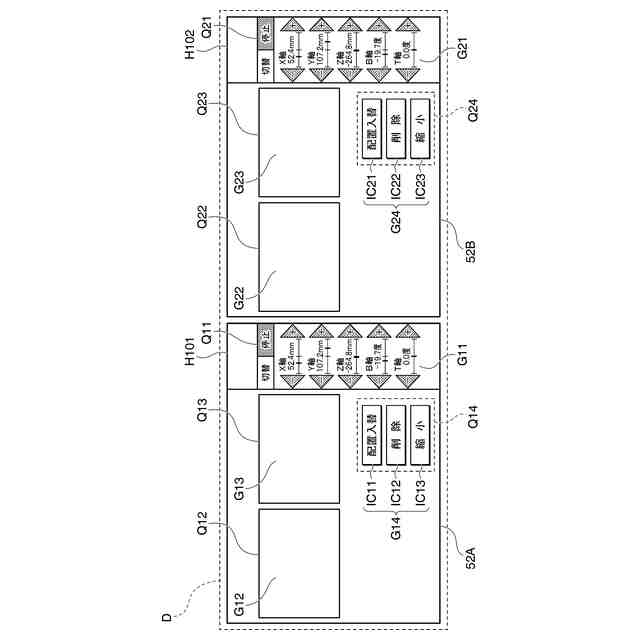
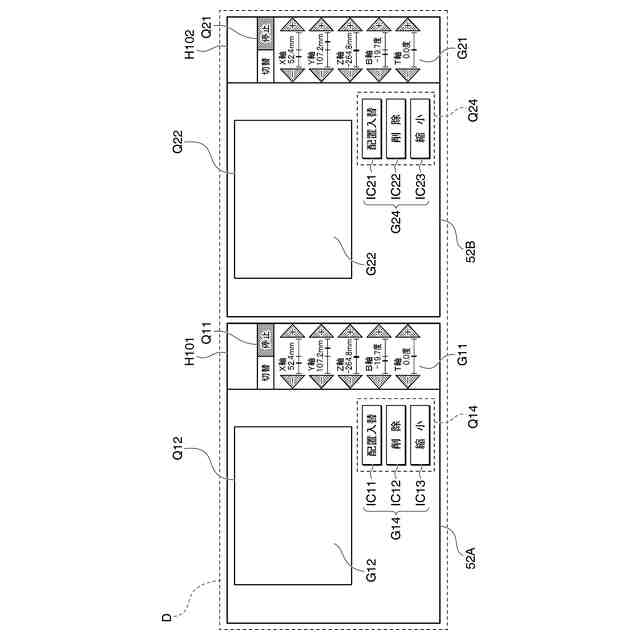
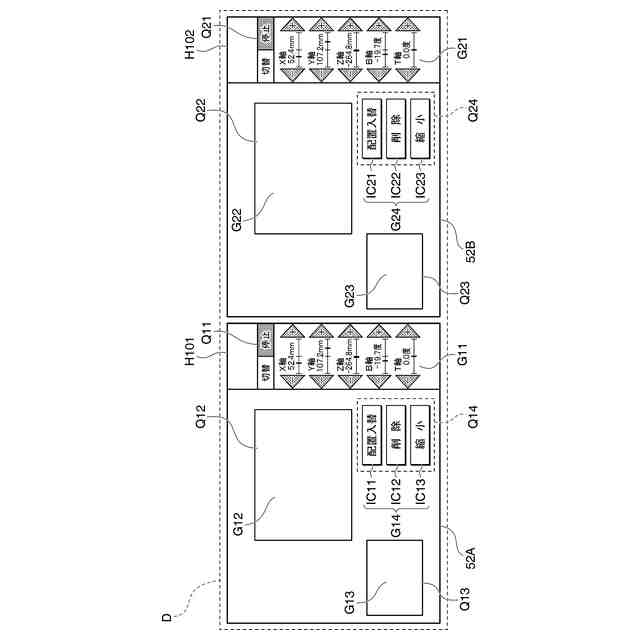
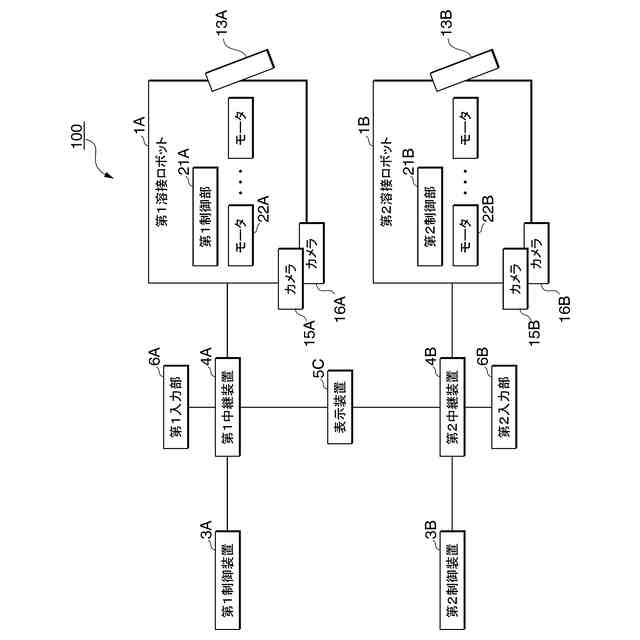
【解決手段】溶接システムは、第1鋼材の第1開先を溶接する第1溶接ロボットと、第2鋼材の第2開先を溶接する第2溶接ロボットと、表示制御手段と、を備え、第1溶接ロボットは、第1方向側カメラと、第1反対側カメラとを含み、第2溶接ロボットは、第2方向側カメラと、第2反対側カメラとを含み、表示制御手段は、第1方向側カメラが第1開先を撮像して出力する第1方向側画像データに対応する第1方向側画像と、第1反対側カメラが第1開先を撮像して出力する第1反対側画像データに対応する第1反対側画像と、第2方向側カメラが第2開先を撮像して出力する第2方向側画像データに対応する第2方向側画像と、第2反対側カメラが第2開先を撮像して出力する第2反対側画像データに対応する第2反対側画像と、を、表示部に表示することができる。
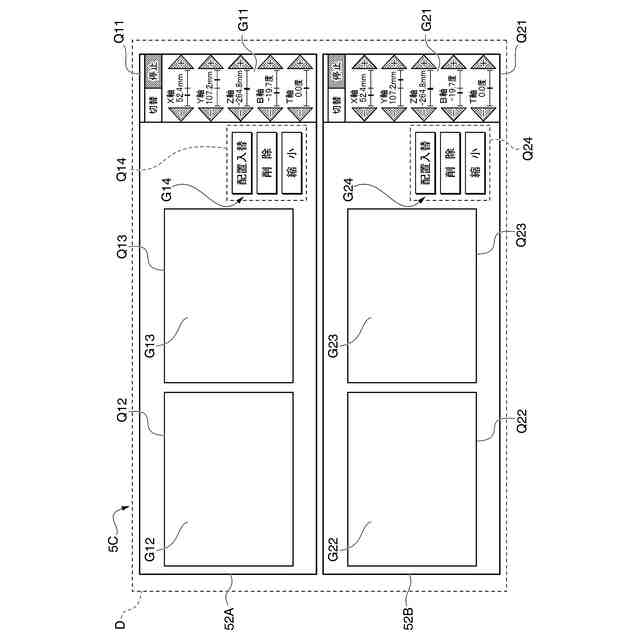
【選択図】図5
特許請求の範囲
【請求項1】
第1鋼材の第1開先を、第1方向に移動しつつ、溶接することができる第1溶接ロボットと、
前記第1鋼材とは異なる第2鋼材の第2開先を、第2方向に移動しつつ、溶接することができる第2溶接ロボットと、
表示制御手段と、
を備える溶接システムであって、
前記第1溶接ロボットは、
前記第1溶接ロボットの前記第1方向の側に設けられる第1方向側カメラと、
前記第1溶接ロボットの、前記第1方向とは反対の側に、設けられる第1反対側カメラと、
を含み、
前記第2溶接ロボットは、
前記第2溶接ロボットの前記第2方向の側に設けられる第2方向側カメラと、
前記第2溶接ロボットの、前記第2方向とは反対の側に、設けられる第2反対側カメラと、
を含み、
前記表示制御手段は、前記第1方向側カメラが前記第1開先を撮像して出力する第1方向側画像データに対応する第1方向側画像と、前記第1反対側カメラが前記第1開先を撮像して出力する第1反対側画像データに対応する第1反対側画像と、前記第2方向側カメラが前記第2開先を撮像して出力する第2方向側画像データに対応する第2方向側画像と、前記第2反対側カメラが前記第2開先を撮像して出力する第2反対側画像データに対応する第2反対側画像と、を、表示部に表示することができる、
ことを特徴とする溶接システム。
続きを表示(約 1,400 文字)
【請求項2】
前記第1溶接ロボットは、前記第1開先を、前記第1方向とは反対の方向に移動しつつ、溶接することができ、
前記第2溶接ロボットは、前記第2開先を、前記第2方向とは反対の方向に移動しつつ、溶接することができ、
前記表示制御手段は、前記第1溶接ロボットが移動する方向、及び、前記第2溶接ロボットが移動する方向、の少なくとも一方に応じ、前記表示部における表示位置であって前記第1方向側画像の表示位置と、前記表示部における表示位置であって前記第1反対側画像の表示位置と、前記表示部における表示位置であって前記第2方向側画像の表示位置と、前記表示部における表示位置であって前記第2反対側画像の表示位置と、を決定する、
ことを特徴とする請求項1に記載の溶接システム。
【請求項3】
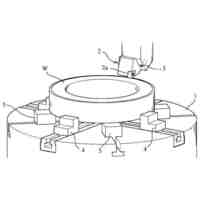
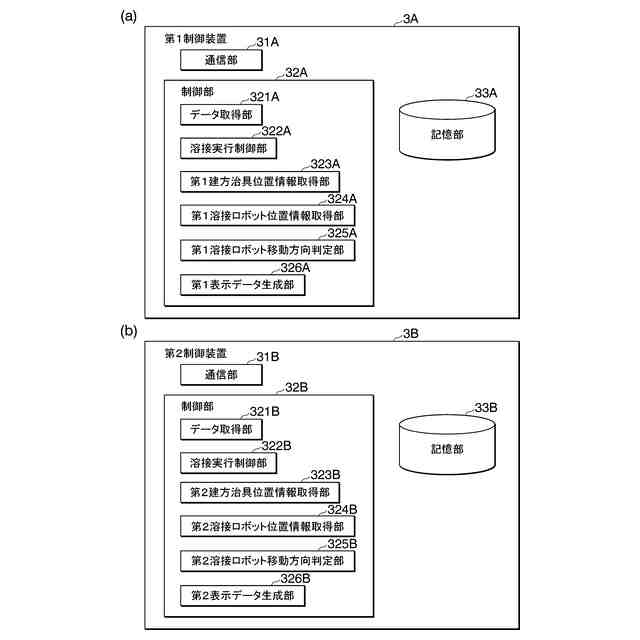
前記第1鋼材に設けられる第1建方治具、の位置を示す第1建方治具位置情報を取得する第1建方治具位置情報取得手段と、
前記第2鋼材に設けられる第2建方治具、の位置を示す第2建方治具位置情報を取得する第2建方治具位置情報取得手段と、
を更に備え、
前記表示制御手段は、前記第1建方治具位置情報取得手段によって取得される第1建方治具位置情報、及び、前記第2建方治具位置情報取得手段によって取得される第2建方治具位置情報、の少なくとも一方に応じ、前記表示部における表示位置であって前記第1方向側画像の表示位置と、前記表示部における表示位置であって前記第1反対側画像の表示位置と、前記表示部における表示位置であって前記第2方向側画像の表示位置と、前記表示部における表示位置であって前記第2反対側画像の表示位置と、を決定する、
ことを特徴とする請求項1に記載の溶接システム。
【請求項4】
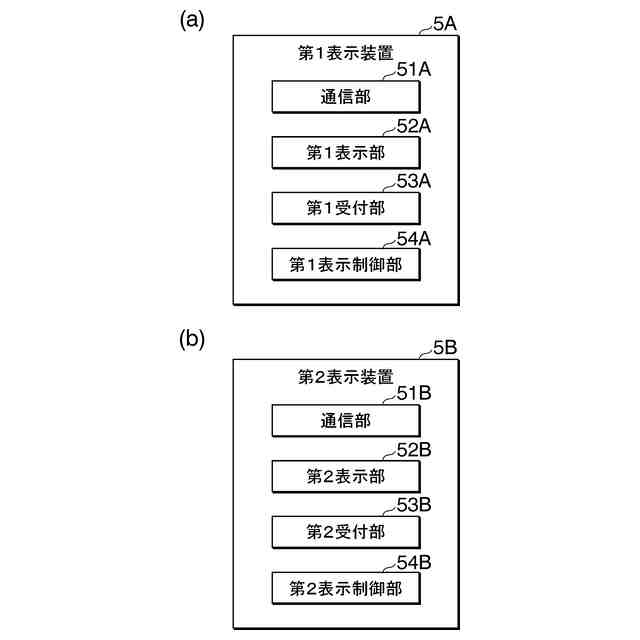
第1指示を受け付ける受付手段、
を更に備え、
前記表示制御手段は、前記受付手段が前記第1指示を受け付ける場合、前記表示部における表示位置であって前記第1方向側画像の表示位置と、前記表示部における表示位置であって前記第2方向側画像の表示位置と、を接近させるよう、前記表示部を制御する、
ことを特徴とする請求項1乃至3のいずれか1項に記載の溶接システム。
【請求項5】
前記表示制御手段は、前記受付手段が前記第1指示を受け付ける場合、前記表示部における表示位置であって前記第1方向側画像の表示位置と、前記表示部における表示位置であって前記第1反対側画像の表示位置と、を入れ替えることで、前記第1方向側画像の表示位置と、前記第2方向側画像の表示位置と、が接近するよう、前記表示部を制御する、
ことを特徴とする請求項4に記載の溶接システム。
【請求項6】
第1指示を受け付ける受付手段、
を更に備え、
前記表示制御手段は、前記受付手段が前記第1指示を受け付ける場合、前記第1反対側画像及び前記第2反対側画像を前記表示部に表示させない、
ことを特徴とする請求項1乃至3のいずれか1項に記載の溶接システム。
【請求項7】
第1指示を受け付ける受付手段、
を更に備え、
前記表示制御手段は、前記受付手段が前記第1指示を受け付ける場合、前記第1反対側画像及び前記第2反対側画像を縮小させて前記表示部に表示させる、
ことを特徴とする請求項1乃至3のいずれか1項に記載の溶接システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、溶接システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
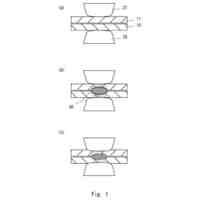
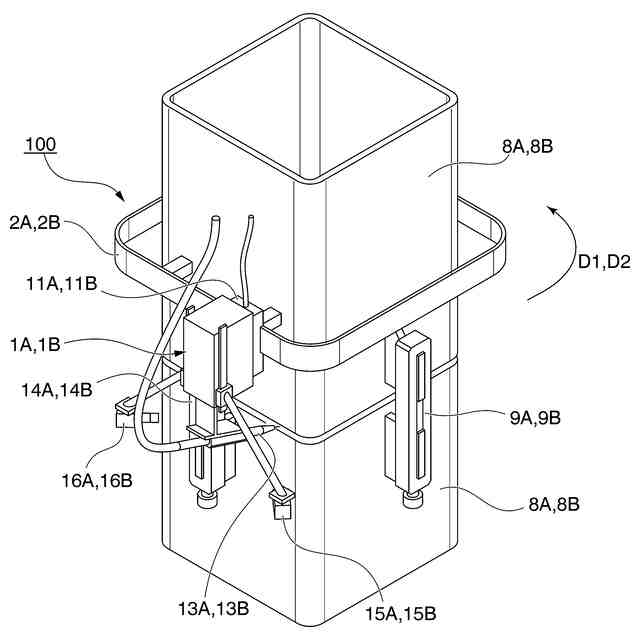
高層ビルなどの大型建築物には、角形の鋼管を溶接により継ぎ足して形成された鋼管柱が用いられている。角形の鋼管の継ぎ足しには、ガイドレールに沿って鋼管の周囲を巡回可能な溶接ロボットが利用される。
【先行技術文献】
【特許文献】
【0003】
特許第7203942号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
溶接ロボットによる溶接品質を確保するために、オペレータが、溶接ロボットを遠隔操作し、溶接トーチの狙い位置を調整することがある。この場合、オペレータは、表示部に表示される溶接箇所を見ながら溶接トーチの狙い位置を調整するため、複数の溶接ロボットを同時に操作することが困難であった。
【0005】
本発明は、前述した事情に鑑みてなされたものであって、複数の溶接ロボットを同時に操作することができる溶接システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
<1>本発明の一態様に係る溶接システムは、第1鋼材の第1開先を、第1方向に移動しつつ、溶接することができる第1溶接ロボットと、前記第1鋼材とは異なる第2鋼材の第2開先を、第2方向に移動しつつ、溶接することができる第2溶接ロボットと、表示制御手段と、を備える溶接システムであって、前記第1溶接ロボットは、前記第1溶接ロボットの前記第1方向の側に設けられる第1方向側カメラと、前記第1溶接ロボットの、前記第1方向とは反対の側に、設けられる第1反対側カメラと、を含み、前記第2溶接ロボットは、前記第2溶接ロボットの前記第2方向の側に設けられる第2方向側カメラと、前記第2溶接ロボットの、前記第2方向とは反対の側に、設けられる第2反対側カメラと、を含み、前記表示制御手段は、前記第1方向側カメラが前記第1開先を撮像して出力する第1方向側画像データに対応する第1方向側画像と、前記第1反対側カメラが前記第1開先を撮像して出力する第1反対側画像データに対応する第1反対側画像と、前記第2方向側カメラが前記第2開先を撮像して出力する第2方向側画像データに対応する第2方向側画像と、前記第2反対側カメラが前記第2開先を撮像して出力する第2反対側画像データに対応する第2反対側画像と、を、表示部に表示することができる、ことを特徴とする。
【0007】
表示部に、第1方向側画像と、第1反対側画像と、第2方向側画像と、第2反対側画像と、を表示することができるため、オペレータにより複数の溶接ロボットを同時に操作することができる。
しかも、第1溶接ロボットと第2溶接ロボットとが溶接する鋼材が異なっている。例えば、第1溶接ロボットが溶接する第1鋼材と、第2溶接ロボットが溶接する第2鋼材と、が異なる位置にある場合などには、複数の溶接ロボットを同時に操作することは極めて困難である。よって、前述の作用効果が顕著に奏功される。
【0008】
なお、第1方向側画像と、第1反対側画像とを表示部に表示する場合、第1溶接ロボットによる溶接を、第1溶接ロボットの前方及び後方から確認できるため、オペレータによる第1溶接ロボットの操作の精度が向上する。第2方向側画像と、第2反対側画像とを表示部に表示する場合、第2溶接ロボットによる溶接を、第2溶接ロボットの前方及び後方から確認できるため、オペレータによる第2溶接ロボットの操作の精度が向上する。
第1方向側画像と、第2方向側画像とを表示部に表示する場合、オペレータは、第1溶接ロボットによる溶接及び第2溶接ロボットによる溶接のそれぞれについて、第1溶接ロボット及び第2溶接ロボットの前方の溶接部位、すなわちこれから溶接する部位の形状や母材との境界を把握することができるため、オペレータによる第1溶接ロボット及び第2溶接ロボットの操作の精度が向上する。
【0009】
<2>上記<1>に係る溶接システムでは、前記第1溶接ロボットは、前記第1開先を、前記第1方向とは反対の方向に移動しつつ、溶接することができ、前記第2溶接ロボットは、前記第2開先を、前記第2方向とは反対の方向に移動しつつ、溶接することができ、前記表示制御手段は、前記第1溶接ロボットが移動する方向、及び、前記第2溶接ロボットが移動する方向、の少なくとも一方に応じ、前記表示部における表示位置であって前記第1方向側画像の表示位置と、前記表示部における表示位置であって前記第1反対側画像の表示位置と、前記表示部における表示位置であって前記第2方向側画像の表示位置と、前記表示部における表示位置であって前記第2反対側画像の表示位置と、を決定する、構成を採用してもよい。
【0010】
上記構成により、オペレータが、第1溶接ロボット及び第2溶接ロボットが移動する方向側の画像と、第1溶接ロボット及び第2溶接ロボットが移動する方向と反対側の画像とを間違えて認識してしまうことを抑制できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
スラッジ除去装置
1か月前
日東精工株式会社
ねじ締め装置
4日前
個人
複合金属回転式ホーン
1か月前
有限会社津谷工業
切削工具
3か月前
株式会社FUJI
工作機械
20日前
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
積層造形溶接方法
24日前
株式会社ツガミ
工作機械
1か月前
株式会社ナベヤ
締結装置
24日前
株式会社ツガミ
工作機械
1か月前
トヨタ自動車株式会社
検査方法
1か月前
株式会社トーキン
溶接用トーチ
1か月前
トヨタ自動車株式会社
積層コア
2か月前
トヨタ自動車株式会社
取付装置
1か月前
大和ハウス工業株式会社
溶接方法
5日前
オークマ株式会社
診断装置
10日前
株式会社不二越
歯車研削盤
1か月前
株式会社メドメタレックス
ドリル
2か月前
オークマ株式会社
工作機械
10日前
株式会社不二越
歯車加工機
3か月前
株式会社オーエム製作所
工作機械
1か月前
サムテック株式会社
加工物製造方法
2か月前
トヨタ自動車株式会社
位相測定方法
2か月前
三菱電機株式会社
ねじ取り出し装置
2か月前
株式会社FUJI
自動化用パレット
2か月前
スター精密株式会社
工作機械
4日前
豊田鉄工株式会社
レーザー溶接装置
今日
株式会社関本管工
エルボ管保持装置
1か月前
株式会社ヤマダスポット
抵抗溶接機
3か月前
株式会社浪速試錐工業所
防風カバー
3か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接トーチ
1か月前
DMG森精機株式会社
工作機械
1か月前
株式会社不二越
工具の製造方法
2か月前
工機ホールディングス株式会社
作業機
3か月前
トヨタ自動車株式会社
銅線の接合方法
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ