TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025028776
公報種別
公開特許公報(A)
公開日
2025-03-03
出願番号
2024135574
出願日
2024-08-15
発明の名称
自動車の操舵アクチュエータに予め定めることができるコントローラ操舵トルクを算出するための方法
出願人
ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
,
ROBERT BOSCH GMBH
代理人
個人
,
個人
,
個人
主分類
B62D
6/00 20060101AFI20250221BHJP(鉄道以外の路面車両)
要約
【課題】自動車の操舵アクチュエータに予め定められるべきコントローラ操舵トルクを決定するための方法を提供する。
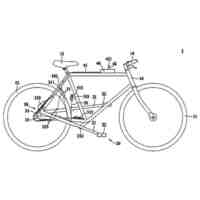
【解決手段】外部コントローラ(2a)と内部コントローラ(2i)とを含む二重コントローラ(1)を用いてコントローラ操舵トルクが算出され、外部コントローラに自動車内の操舵アクチュエータ(21)によって設定された操舵角が供給される。操舵角の時間微分の目標値が操作変数として出力される。内部コントローラ(2i)にフィードフォワードモデル操舵トルクが供給され、当該操舵トルクは操舵アクチュエータ(21)の物理的挙動に応じてリアルタイムで決定される。操舵アクチュエータ(21)の物理的状態は外部励起を用いた回転単一質量ばねダンパによってモデル化される。少なくとも1つの時間依存のばねダンパモデルパラメータが再帰的補償計算によって推定される。この推定から、フィードフォワードモデル操舵トルクが決定される。
【選択図】図1
特許請求の範囲
【請求項1】
自動車(20)の操舵アクチュエータ(21)に予め定められるべきコントローラ操舵トルク(SteerTrq
SAC
(t))を算出するための方法であって、
前記コントローラ操舵トルク(SteerTrq
SAC
(t))が、外部コントローラ(2a)と、前記外部コントローラ(2a)の下流に接続された内部コントローラ(2i)とを含む二重コントローラ(1)によって算出され、
前記外部コントローラ(2a)に、制御変数として、前記自動車内の前記操舵アクチュエータ(21)によって設定された操舵角(δ(t))が供給され、
前記外部コントローラ(2a)が、前記操舵角の時間微分の目標値(d/dtδ
Target
)を操作変数として出力し、これが前記内部コントローラ(2i)に制御変数として供給され、
前記内部コントローラ(2i)が、前記求められるコントローラ操舵トルク(SteerTrq
SAC
(t))を操作変数として出力し、
前記コントローラ操舵トルク(SteerTrq
SAC
(t))を計算するために、前記内部コントローラ(2i)に、操作変数としてフィードフォワードモデル操舵トルク(SteerTrq
FF
(t))が提供され、前記フィードフォワードモデル操舵トルク(SteerTrq
FF
(t))が、前記操舵アクチュエータ(21)の物理的挙動に応じてリアルタイムで決定され、
ステアリング機構(21)の物理的状態が、外部励起(Tmot(t)
SAC+DRIVER
(t))と、操舵角(δ)と、前記操舵アクチュエータ(21)の現在の物理的状態を特徴付ける少なくとも1つのさらなるばねダンパモデルパラメータ(J(t)、D(t)、C(t)、Offs(t))とを用いた回転単一質量ばねダンパによってモデル化され、
前記少なくとも1つの時間依存のばねダンパモデルパラメータ(J(t)、D(t)、C(t)、Offs(t))が、再帰的補償計算によって推定され、
前記推定から、前記フィードフォワードモデル操舵トルク(SteerTrq
FF
(t))が計算される、
方法。
続きを表示(約 1,500 文字)
【請求項2】
前記フィードフォワードモデル操舵トルク(SteerTrq
FF
(t))が、前記内部コントローラ(2i)の制御ループの一部として計算される
ことを特徴とする請求項1に記載の方法。
【請求項3】
前記フィードフォワードモデル操舵トルク(SteerTrq
FF
(t))が、前記操舵角の前記目標値(δ
Target
)、前記内部コントローラ(2i)によって計算された前記コントローラ操舵トルク(SteerTrq
SAC
(t))、および前記自動車(20)の運転者によって加えられる運転者操舵トルク(SteerTrq
SAC
(t)+SteerTrq
DRIVER
)に応じて計算される
ことを特徴とする請求項1または2に記載の方法。
【請求項4】
ばねダンパモデルパラメータとして、前記回転単一質量ばねダンパで使用される以下の定数、
回転慣性モーメント(J(t))、
減衰D(D(t))、
剛性C(C(t))、および
オフセットOFFS(t)
が、時間依存変数として推定される
ことを特徴とする請求項1から3のいずれか一項に記載の方法。
【請求項5】
前記推定がリアルタイムで行われる
ことを特徴とする請求項1から4のいずれか一項に記載の方法。
【請求項6】
前記推定された剛性(C_EST)および前記推定されたオフセット(OFFS_EST)から、外部から予め定められた目標操舵角(δ
target
)に応じて、前記フィードフォワードモデル操舵トルク(SteerTrq
FF
)が算出される
ことを特徴とする請求項4または5に記載の方法。
【請求項7】
前記少なくとも1つのばねダンパモデルパラメータ(J(t)、D(t)、C(t)、OFFS(t))、特に請求項4による前記ばねダンパモデルパラメータ(J(t)、D(t)、C(t)、OFFS(t))が、カルマンフィルタを用いて推定される
ことを特徴とする請求項1から6のいずれか一項に記載の方法。
【請求項8】
前記外部から励起される単一質量ばねダンパが、以下の微分方程式
TIFF
2025028776000008.tif
8
87
によって記述される
ことを特徴とする請求項1から7のいずれか一項に記載の方法。
【請求項9】
再帰的補償計算に関して、前記4つのばねダンパモデルパラメータJ(t)、D(t)、C(t)、Offs(t)がベクトル変数Z=Z(t)とみなされる
ことを特徴とする請求項1から8のいずれか一項に記載の方法。
【請求項10】
前記ばねダンパの前記外部励起(SteerTrq
SAC
+SteerTrq
DRIVER
)が、前記自動車(20)の前記運転者によって加えられる運転者操舵トルク(SteerTrq
SAC
+SteerTrq
DRIVER
)と、前記操舵アクチュエータ(21)に予め定められた前記コントローラ操舵トルク(SteerTrq
SAC
)との和によって定められる
ことを特徴とする請求項1から9のいずれか一項に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動車の操舵アクチュエータに予め定められるべきコントローラ操舵トルクを算出するための方法に関する。さらに、本発明は、この方法を実行するように設計/プログラムされている制御装置に関する。最後に、本発明は、そのような制御装置を備える自動車に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
自動車のいわゆる操舵角または車線維持支援機能に関連して、自動車が車道走行時に予め定められた軌道の経路に従うように、ステアリング機構の操舵アクチュエータに設定することができる操舵角を様々な因子を考慮して決定することが公知である。
【0003】
このために、操舵アクチュエータに設定することができる操舵トルクを算出するための方法が公知である。そのような従来の方法は通常、1段または2段のコントローラにより実施され、例えば欧州特許第3321149B1号、米国特許出願公開第2019/0308664A1号、および独国特許出願公開第102014208786A1号に記載されている。
【0004】
そのような従来の方法での問題点として、操舵アクチュエータの物理的特性が制御にかなりの影響を及ぼし、したがって操舵アクチュエータの実際のステアリング挙動にかなりの影響を及ぼすことが判明しており、これは、コントローラの制御挙動に悪影響を与える可能性がある。
【0005】
制御性能の向上のためにいわゆるフォワードモデルの形でコントローラに実装される、操舵アクチュエータの物理的特性の対応するモデリングは、実際には比較的不正確であることが判明しており、ステアリング機構の寿命にわたる操舵アクチュエータの物理的特性の変化を考慮しない。
【先行技術文献】
【特許文献】
【0006】
欧州特許第3321149B1号
米国特許出願公開第2019/0308664A1号
独国特許出願公開第102014208786A1号
【発明の概要】
【発明が解決しようとする課題】
【0007】
したがって、本発明の課題は、上述した欠点を少なくとも一部、理想的には完全に解消する、自動車の操舵アクチュエータに予め定められるべきコントローラ操舵トルクを決定するための改良された方法を生み出すことである。
【課題を解決するための手段】
【0008】
この課題は、独立請求項の主題によって解決される。好ましい実施形態は、従属請求項の主題である。
【0009】
したがって、本発明の基本的な着想は、ダブルコントローラを用いて操舵アクチュエータに関するコントローラ操舵トルクを決定することであり、外部コントローラが、自動車の操舵アクチュエータによって設定された操舵角を制御変数として使用し、内部コントローラが、この操舵角の時間微分を制御変数として使用する。
【0010】
ここで、本発明によれば、内部コントローラに、追加の入力変数として、フィードフォワードモデル操舵トルクを提供することが提案され、それによって操舵アクチュエータの現在の物理的特性がリアルタイムで考慮される。さらに、外部励起および様々なばねダンパモデルパラメータを用いた回転単一質量ばねダンパによって、ステアリング機構の物理的特性を時間依存でモデル化することが提案される。内部コントローラに供給されるフィードフォワードモデル操舵トルクを計算するために、選択された時間依存のばねダンパモデルパラメータが、再帰的補償計算を用いて推定される。ここで提案される、操舵アクチュエータの物理的特性の本発明による考慮により、2段コントローラの制御挙動を大幅に改善することができる。これは、有利には、自動車のステアリング制御、および自動車の支援運転またはさらには自律運転にも効果をもたらす。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
電動モビリティ
4日前
個人
折り畳み自転車
3か月前
個人
重量物移動台車
10か月前
個人
自転車用傘捕捉具
4か月前
個人
体重掛けリフト台車
3か月前
個人
自由方向乗車自転車
4日前
個人
自転車用荷台
7か月前
個人
アタッチメント
4か月前
井関農機株式会社
作業車両
9か月前
個人
自転車用荷物台
3か月前
個人
キャンピングトライク
1か月前
個人
ステアリングの操向部材
1か月前
個人
スライドレインプルーフ
9か月前
株式会社CPM
駐輪機
4か月前
個人
ステアリングの操向部材
6か月前
株式会社クラベ
面状ユニット
9か月前
帝人株式会社
車両構造体
9か月前
株式会社三五
リアサブフレーム
3か月前
三甲株式会社
台車
6か月前
三甲株式会社
台車
6か月前
祖峰企画株式会社
平台車
8か月前
ヤマハ発動機株式会社
車両
4か月前
豊田合成株式会社
操舵装置
4か月前
学校法人千葉工業大学
車両
2か月前
学校法人千葉工業大学
車両
2か月前
学校法人千葉工業大学
車両
2か月前
ダイハツ工業株式会社
車両
5か月前
ヤマハ発動機株式会社
車両
4か月前
ヤマハ発動機株式会社
車両
4か月前
ヤマハ発動機株式会社
車両
4か月前
個人
足踏みペダル式自転車
9か月前
豊田合成株式会社
ハンドル
10か月前
株式会社カインズ
台車
18日前
株式会社クボタ
作業車
7か月前
アルインコ株式会社
運搬台車
9か月前
アルインコ株式会社
運搬台車
9か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ