TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025837
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023130997
出願日
2023-08-10
発明の名称
鉄筋結束装置
出願人
マックス株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
E04G
21/12 20060101AFI20250214BHJP(建築物)
要約
【課題】結束機構を目的の位置に正確に配置し、かつ、結束機構が鉄筋に当接するときの位置を安定させることができる鉄筋結束装置を提供する。
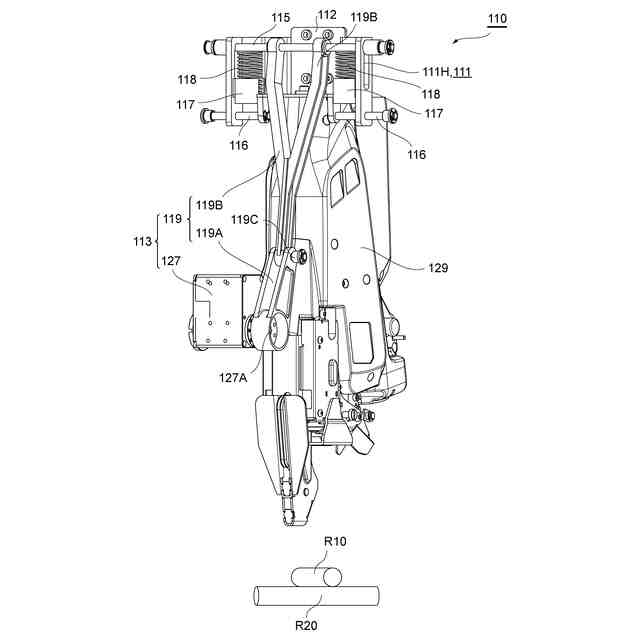
【解決手段】鉄筋を結束する結束部129と、結束部129を保持する保持部112と、保持部112を本体ユニットに対して昇降させる昇降機構113と、を備え、昇降機構113は、保持部112に連結された連結部119と、連結部119を移動させる駆動部127と、を含み、連結部119は、可動軸115を有し、保持部112は、可動軸115に係合する長孔111Hを有し、駆動部127は、結束部129が鉄筋に当接した状態において連結部119を移動させ、可動軸115を長孔111Hに対して移動させ 、長孔111Hに対する可動軸115の係合を解除する。
【選択図】図13A
特許請求の範囲
【請求項1】
鉄筋を結束する結束部と、
前記結束部を保持する保持部と、
前記保持部を本体部に対して昇降させる昇降部と、
を備え、
前記昇降部は、
前記保持部に連結された連結部と、
前記連結部を移動させる駆動部と、
を含み、
前記連結部は、係合部を有し、
前記保持部は、前記係合部に係合する被係合部を有し、
前記駆動部は、
前記結束部が前記鉄筋に当接した状態において前記連結部を移動させ、前記係合部を前記被係合部に対して移動させ、前記被係合部に対する前記係合部の係合を解除する、
鉄筋結束装置。
続きを表示(約 1,200 文字)
【請求項2】
前記係合部を前記被係合部に係合させる方向に付勢する付勢部をさらに有する、
請求項1に記載の鉄筋結束装置。
【請求項3】
前記駆動部は、前記結束部が前記鉄筋に当接する位置まで前記連結部を移動させた後、前記連結部をさらに移動させ、前記被係合部に対する前記係合部の係合を解除する、
請求項1に記載の鉄筋結束装置。
【請求項4】
前記結束部が前記鉄筋に当接したことを検知する検知部をさらに備え、
前記駆動部は、前記結束部が前記鉄筋に当接したことが前記検知部により検知されたことを条件に、前記被係合部に対する前記係合部の係合を解除する、
請求項1に記載の鉄筋結束装置。
【請求項5】
前記連結部を前記保持部の昇降方向に沿うようにガイドするガイド部をさらに有する、
請求項1に記載の鉄筋結束装置。
【請求項6】
前記被係合部は、長孔状をなしており、
前記係合部が係合する第1孔部と、
前記第1孔部に連通し、前記保持部の昇降方向と交差する方向における幅寸法が前記第1孔部よりも大きい第2孔部と、
を含む、
請求項5に記載の鉄筋結束装置。
【請求項7】
前記ガイド部によりガイドされる被ガイド部をさらに有し、
前記結束部は、前記係合部が前記第2孔部に位置する場合、前記被ガイド部を中心として揺動可能に支持される、
請求項6に記載の鉄筋結束装置。
【請求項8】
鉄筋を結束する結束部と、
前記結束部を保持する保持部と、
前記保持部を本体部に対して昇降させる昇降部と、
前記保持部の下降方向への移動速度を減衰させる弾性部と
を備え、
前記弾性部は、前記結束部が前記鉄筋に当接した状態においてのみ前記保持部の下降方向への移動速度を減衰する、
鉄筋結束装置。
【請求項9】
鉄筋を結束する結束部と、
前記結束部を保持する保持部と、
前記保持部に連結された連結部と、
前記連結部を駆動することにより前記保持部及び前記結束部を昇降可能に設けられた制御部と、を備え、
前記連結部は、前記保持部と係合するための係合部を有する鉄筋結束装置であって、
前記制御部は、
前記保持部と前記係合部とが係合した状態で前記保持部と前記係合部とを共に下降させて前記結束部を鉄筋に当接させる第1動作と、
前記結束部が前記鉄筋に当接した状態で、前記係合部を前記保持部に対して移動させて前記保持部と前記係合部との係合を解除させる第2動作とを実行可能に構成されている
鉄筋結束装置。
【請求項10】
前記係合部を前記保持部と係合する方向に付勢する付勢部をさらに有する、
請求項9に記載の鉄筋結束装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、鉄筋結束装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、例えば、縦方向に延伸する鉄筋と、横方向に延伸する鉄筋とが交差する交差部をワイヤ等により結束する鉄筋結束作業を自動化する技術が検討されている。例えば、特許文献1に開示された技術においては、結束機本体(結束機構)を移動させるときには、規制構造によって第1固定部に対する第2固定部の相対変位を規制する。これにより、ロボット本体の接続部に対する結束機本体の相対位置を固定し、結束機本体を目的の位置に正確に配置する。一方で、結束工程では、規制構造による規制を解除する。これにより、反動位置ズレ吸収部材が結束に伴う結束機本体の反動及び鉄筋と結束機の位置ズレを吸収し、ロボット本体への負荷を軽減する。
【先行技術文献】
【特許文献】
【0003】
特開2021-49568号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術においては、結束機本体が鉄筋に当接するときの位置が安定しにくいという課題があった。
【0005】
本発明はこのような事情に鑑みてなされたものであり、結束機構を目的の位置に正確に配置し、かつ、結束機構が鉄筋に当接するときの位置を安定させることができる鉄筋結束装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様は、鉄筋を結束する結束部と、結束部を保持する保持部と、保持部を本体部に対して昇降させる昇降部と、を備え、昇降部は、保持部に連結された連結部と、連結部を移動させる駆動部と、を含み、連結部は、係合部を有し、保持部は、係合部に係合する被係合部を有し、駆動部は、結束部が鉄筋に当接した状態において連結部を移動させ、係合部を被係合部に対して移動させ、被係合部に対する係合部の係合を解除する鉄筋結束装置を提供する。
【0007】
本開示の他の一態様は、鉄筋を結束する結束部と、結束部を保持する保持部と、保持部を本体部に対して昇降させる昇降部と、保持部の下降方向への移動速度を減衰させる弾性部とを備え、弾性部は、結束部が鉄筋に当接した状態においてのみ保持部の下降方向への移動速度を減衰する鉄筋結束装置を提供する。
【0008】
本開示の他の一態様は、鉄筋を結束する結束部と、結束部を保持する保持部と、保持部に連結された連結部と、連結部を駆動することにより保持部及び結束部を昇降可能に制御する制御部とを備え、連結部は、保持部と係合するための係合部を有する鉄筋結束装置であって、制御部は、保持部と係合部とが係合した状態で保持部と係合部とを共に下降させて結束部を鉄筋に当接させる第1動作と、結束部が鉄筋に当接した状態で、係合部を保持部に対して移動させて保持部と係合部との係合を解除させる第2動作とを実行可能に構成されている鉄筋結束装置を提供する。
【発明の効果】
【0009】
本開示によれば、結束機構を目的の位置に正確に配置し、かつ、結束機構が鉄筋に当接するときの位置を安定させることができる。
【図面の簡単な説明】
【0010】
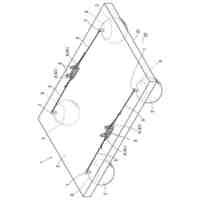
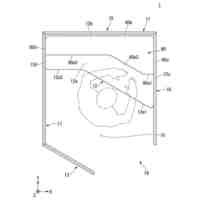
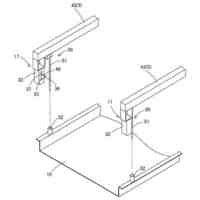
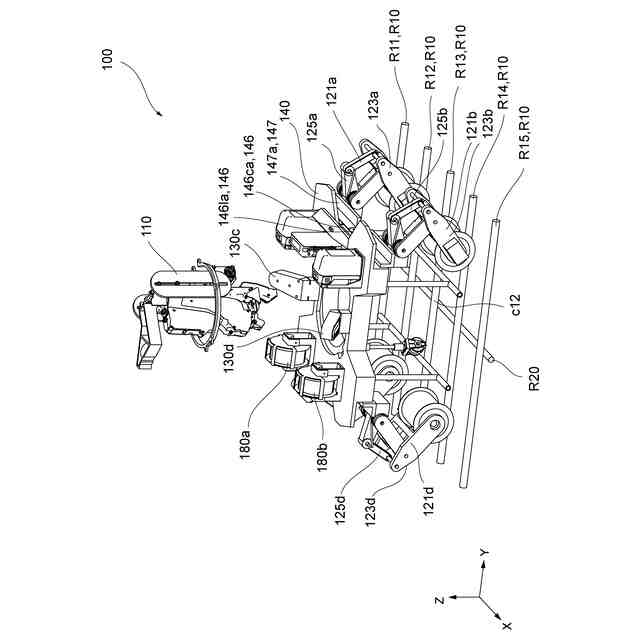
図1は、本開示の一実施例である鉄筋結束ロボット100の斜め上方向から見た全体斜視図である。
図2は、本開示の一実施例である鉄筋結束ロボットの斜め下方向から見た全体斜視図である。
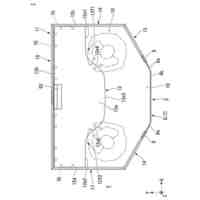
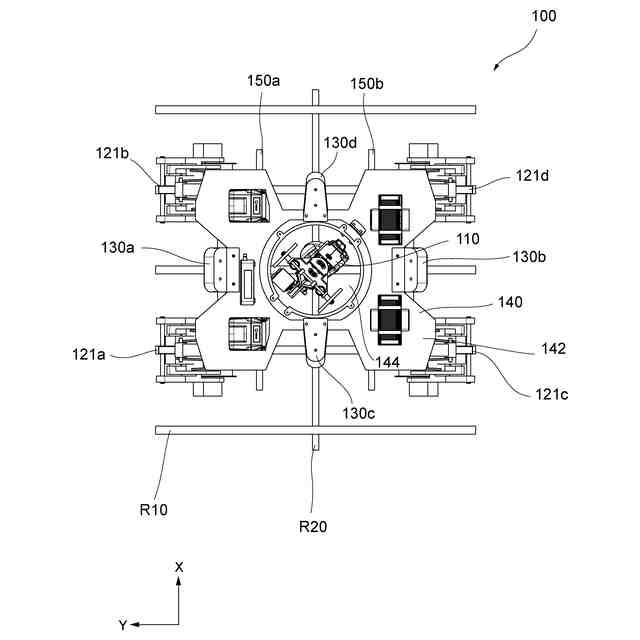
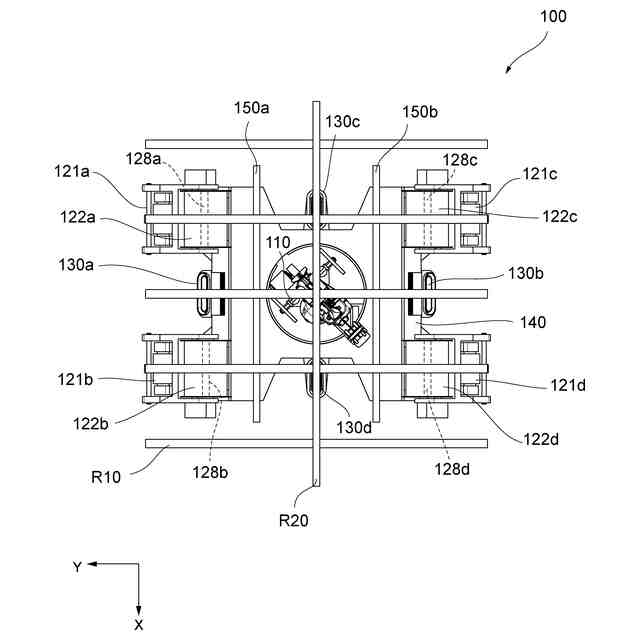
図3は、鉄筋結束ロボット100を上方向(Z方向における上方)から見た平面図である。
図4は、鉄筋結束ロボット100を下方向(Z方向における下方)から見た平面図である。
図5は、鉄筋結束ロボット100の鉄筋結束ユニット110を外した状態を斜め上方向から見た斜視図である。
図6は、鉄筋結束ロボット100の鉄筋結束ユニット110を外した状態を斜め下方向から見た斜視図である。
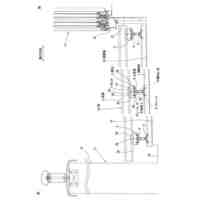
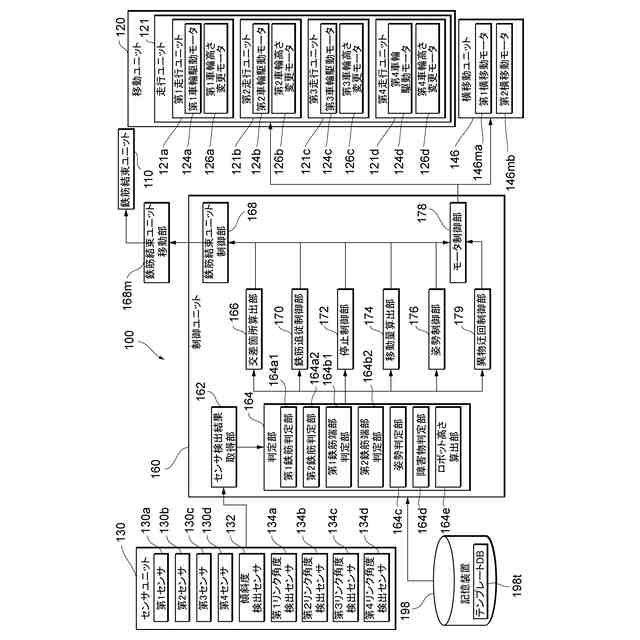
図7は、鉄筋結束ロボット100の機能ブロック構成を説明する図である。
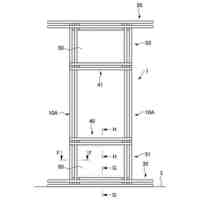
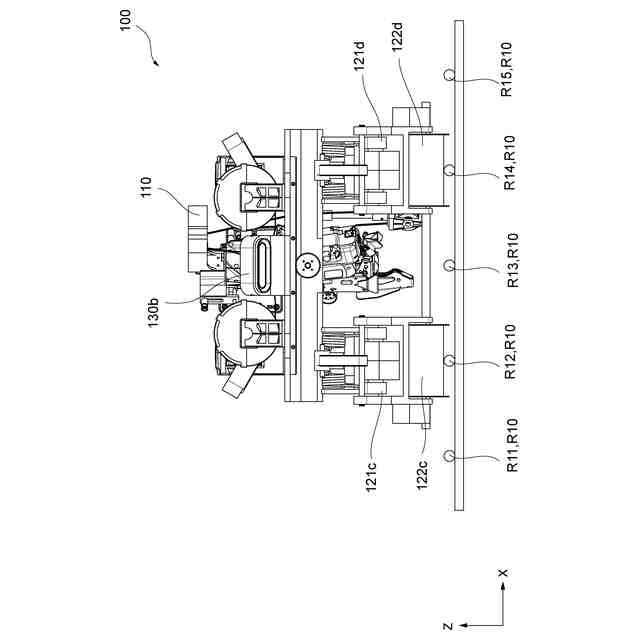
図8は、第1鉄筋R10に沿って走行中の鉄筋結束ロボット100をY方向から見た図である。
図9は、第1鉄筋R10に沿って走行中の鉄筋結束ロボット100をX方向から見た図である。
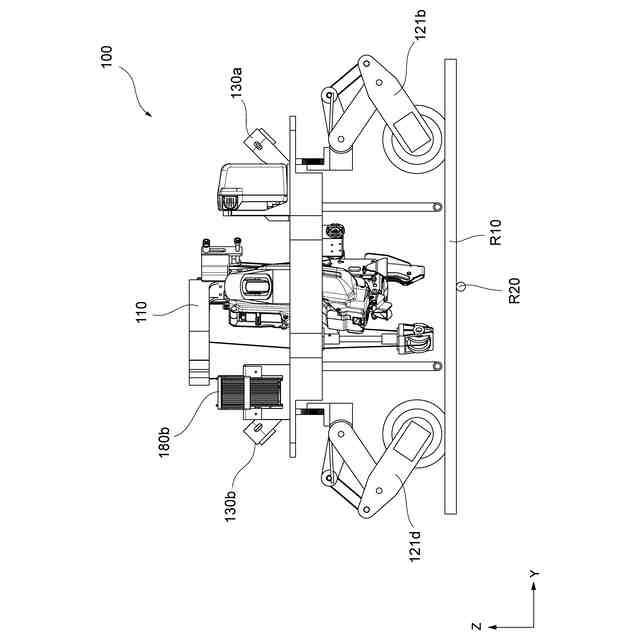
図10は、走行を停止し結束作業を実行する鉄筋結束ロボット100をY方向から見た図である。
図11は、結束作業を実行する鉄筋結束ロボット100をX方向から見た図である。
図12は、結束作業を実行する鉄筋結束ロボット100をZ方向下側から見た図である。
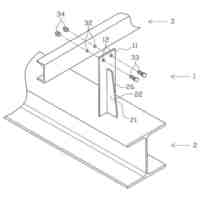
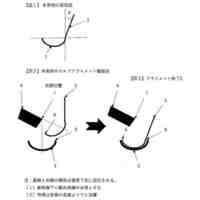
図13Aは、鉄筋結束ロボット100の動作を説明するための図である。
図13Bは、鉄筋結束ロボット100の動作を説明するための図である。
図13Cは、鉄筋結束ロボット100の動作を説明するための図である。
図14Aは、鉄筋結束ロボット100の動作を説明するための図である。
図14Bは、鉄筋結束ロボット100の動作を説明するための図である。
図14Cは、鉄筋結束ロボット100の動作を説明するための図である。
図15Aは、鉄筋結束ロボット100の動作を説明するための図である。
図15Bは、鉄筋結束ロボット100の動作を説明するための図である。
図15Cは、鉄筋結束ロボット100の動作を説明するための図である。
図16Aは、本開示の一実施例である鉄筋結束ロボット100の変形例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
花立て
4日前
個人
納骨堂
1か月前
個人
作業補助器具
26日前
個人
アンカー
1か月前
積水樹脂株式会社
塀
1か月前
個人
住宅用建物
2か月前
有限会社瀬川興業
木製蓋
26日前
個人
免震構造
1か月前
三協立山株式会社
床
1か月前
株式会社創健
建築物
1か月前
環境計測株式会社
局舎
5日前
三協立山株式会社
構造体
2か月前
株式会社オカムラ
ブース
19日前
三協立山株式会社
構造体
4日前
個人
連結具及び施工方法
2か月前
株式会社オカムラ
ブース
19日前
三協立山株式会社
構造体
26日前
個人
セルフアライメント落葉籠
1か月前
ウエダ産業株式会社
破砕機
2か月前
ミサワホーム株式会社
建物
1か月前
大成建設株式会社
木質架構
4日前
戸田建設株式会社
補強木材
2か月前
株式会社日本設計
建築用木材
1か月前
個人
次世代電気自動車向けの駐車場
1か月前
株式会社大林組
建築物
1か月前
株式会社大林組
疑似窓
1か月前
個人
ブロック及び建築構造物
19日前
エヌパット株式会社
支持装置
26日前
株式会社サワヤ
屋根用シート
8日前
明正工業株式会社
建材パネル
1か月前
株式会社大林組
駐輪場
1か月前
株式会社大林組
建築物
1か月前
鹿島建設株式会社
地上タンク
1か月前
株式会社オカムラ
什器ユニット
11日前
極東開発工業株式会社
駐車装置
18日前
極東開発工業株式会社
駐車装置
18日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ