TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025025729
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023130809
出願日
2023-08-10
発明の名称
船舶推進システムの制御装置および方法、船舶
出願人
ヤマハ発動機株式会社
代理人
個人
,
個人
主分類
B63H
25/42 20060101AFI20250214BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】横移動を円滑にする。
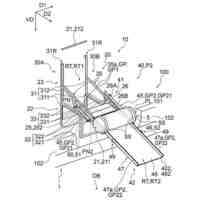
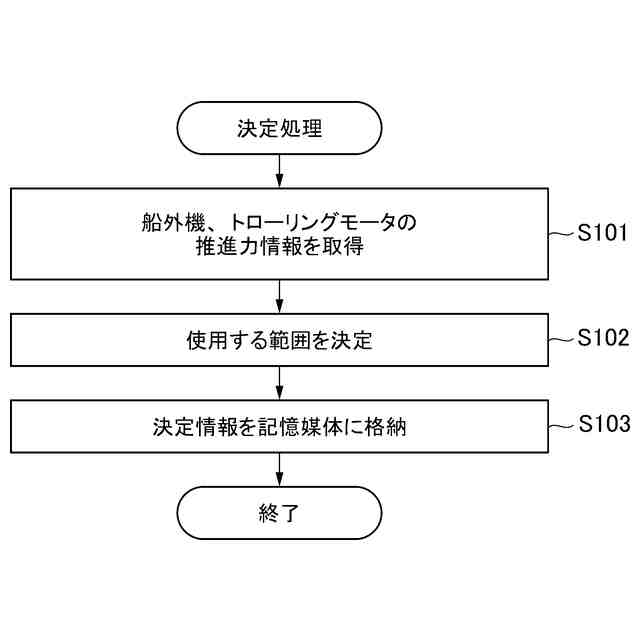
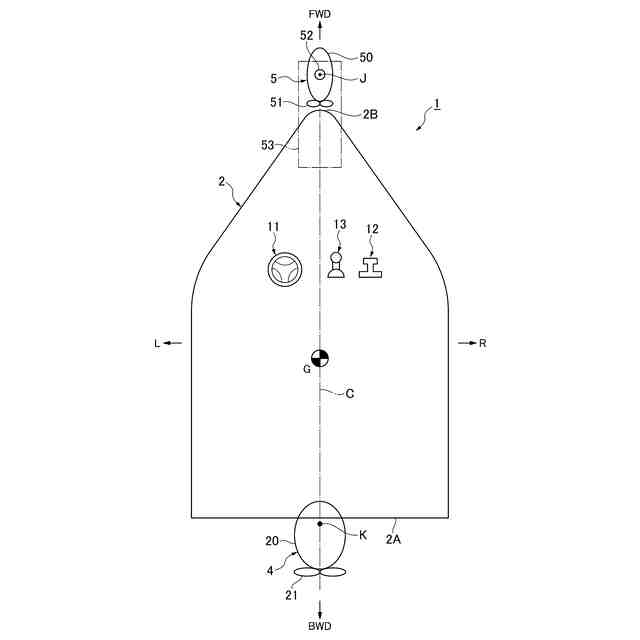
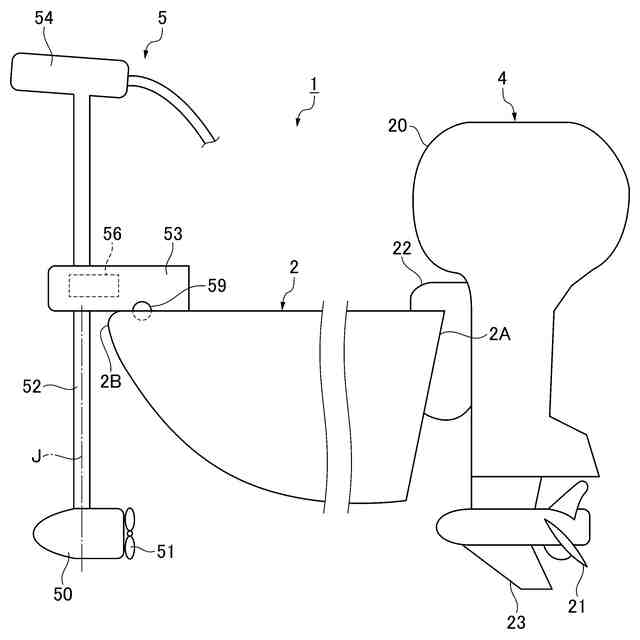
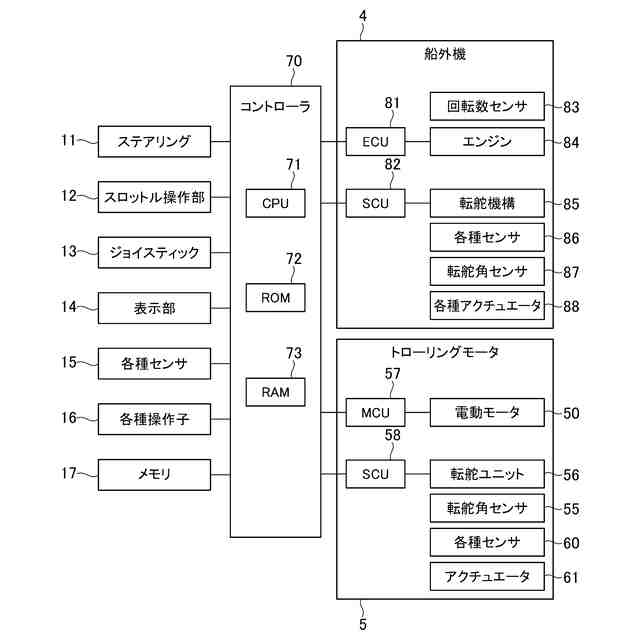
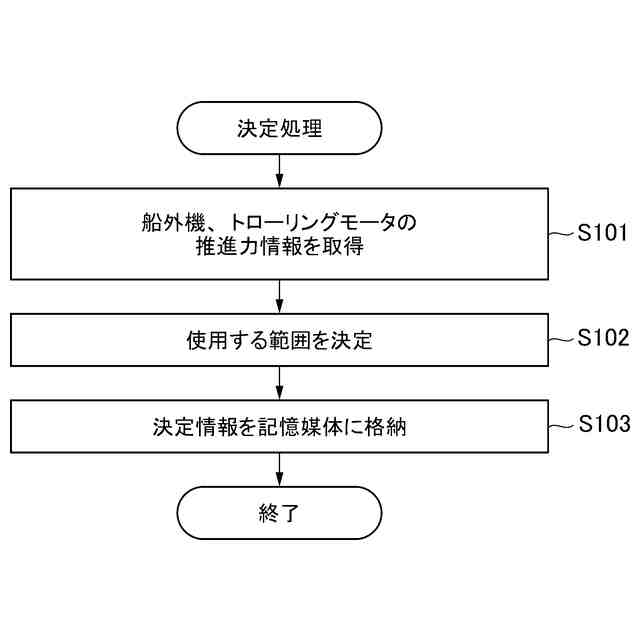
【解決手段】コントローラ70は、船外機4の前進方向の推進力と後進方向の推進力とトローリングモータ5の推進力情報とを取得し、これらに基づいて、船体2の横移動時において、第1の範囲θ1、第2の範囲θ2のいずれの推進力を船外機4に発生させるかを決定する。そしてコントローラ70は、決定された内容を決定情報としてメモリ17に格納する。
【選択図】図7
特許請求の範囲
【請求項1】
船体における船尾に配置され、転舵可能な第1推進機と、
前記船体における船尾よりも前の位置に配置され、転舵可能な第2推進機と、
前記第1推進機の前進方向の推進力に関する情報と前記第1推進機の後進方向の推進力に関する情報と前記第2推進機の推進力に関する情報とを取得する取得部と、
取得された前記第1推進機の前進方向の推進力に関する情報と前記第1推進機の後進方向の推進力に関する情報と前記第2推進機の推進力に関する情報とに基づいて、前記船体の横移動時において、前記第1推進機に、前進方向の成分を含む範囲である第1範囲の推進力を発生させるか、それとも後進方向の成分を含む範囲である第2範囲の推進力を発生させるかを決定する決定部と、
前記決定部により決定された内容を決定情報として記憶媒体に格納する格納処理部と、を有する、船舶推進システムの制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記決定部は、前記第1推進機の前進方向の推進力の最低値と前記第2推進機の推進力の最高値との第1の差と、前記第1推進機の後進方向の推進力の最低値と前記第2推進機の推進力の最高値との第2の差とを比較し、前記第1の差が前記第2の差より小さければ前記第1範囲の推進力を発生させると決定し、前記第2の差が前記第1の差より小さければ前記第2範囲の推進力を発生させると決定する、請求項1に記載の船舶推進システムの制御装置。
【請求項3】
前記決定部は、前記第1の差が前記第2の差と同じである場合は、前記第1範囲と前記第2範囲のうち予め定めた範囲の推進力を発生させると決定する、請求項2に記載の船舶推進システムの制御装置。
【請求項4】
前記第1推進機の前進方向の推進力の前記最低値は、前記第1推進機の最大転舵角度時における前進方向の成分の推進力に基づく値であり、後進方向の推進力の前記最低値は、前記第1推進機の最大転舵角度時における後進方向の成分の推進力に基づく値である、請求項2または3のいずれか1項に記載の船舶推進システムの制御装置。
【請求項5】
前記第1推進機の駆動源はエンジンであり、
前記第1推進機の前進方向の推進力の前記最低値および後進方向の推進力の前記最低値は、スロットル全閉時のエンジン回転数に基づく値である、請求項2乃至4のいずれか1項に記載の船舶推進システムの制御装置。
【請求項6】
前記決定部は、前記第1推進機の前進方向の推進力に関する情報、前記第1推進機の後進方向の推進力に関する情報、前記第2推進機の推進力に関する情報に加えて、さらに前記第1推進機と前記船体の重心との距離と前記第2推進機と前記船体の重心との距離とに基づいて、前記第1範囲の推進力を発生させるか前記第2範囲の推進力を発生させるかを決定する、請求項1乃至5のいずれか1項に記載の船舶推進システムの制御装置。
【請求項7】
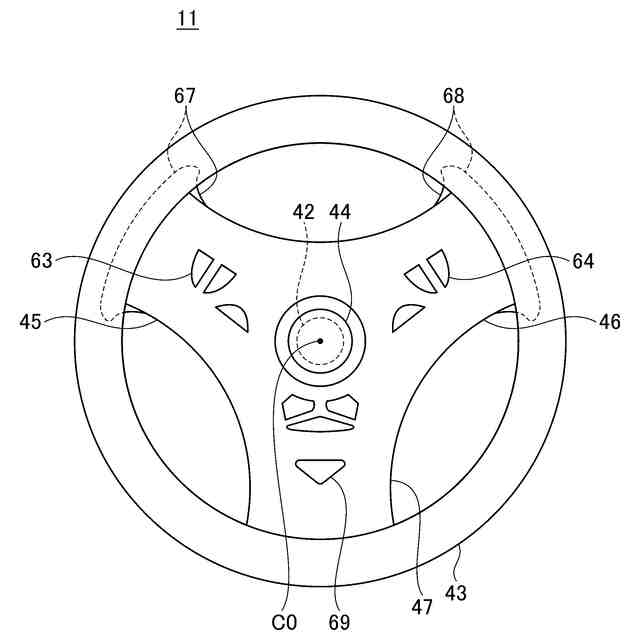
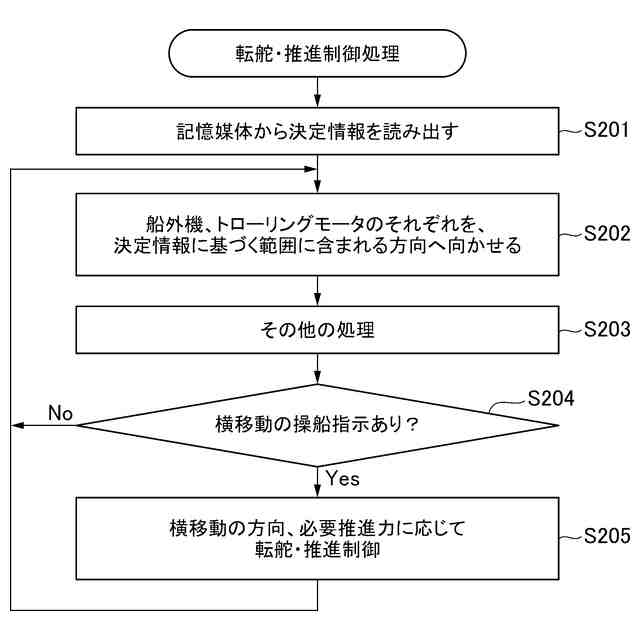
横移動モードの開始が指示されたこと、自動操船モードの開始が指示されたこと、ジョイスティックの操作に基づき前記第1推進機および前記第2推進機を制御するジョイスティックモードの開始が指示されたこと、または、船体に対して横方向への推進力を与えるよう指示するための第1操作指示部と、前記船体に対して前後方向の推進力を与えるよう指示するための第2操作指示部と、を少なくとも含む複数の操作指示部を備えるステアリングホイールの操作に基づき前記第1推進機および前記第2推進機を制御するステアリングホイール操船モードの開始が指示されたこと、に応じて、前記決定情報に基づいて、前記第1推進機の転舵角度および前記第2推進機の転舵角度を制御する制御部をさらに有する、請求項1乃至6のいずれか1項に記載の船舶推進システムの制御装置。
【請求項8】
前記制御部は、前記決定情報が、前記第1推進機に前記第1範囲の推進力を発生させることを示す場合は、前記第1範囲の推進力を発生させる転舵角度に前記第1推進機を移動させ且つ、前記第2範囲の推進力を発生させる転舵角度に前記第2推進機を移動させ、前記決定情報が、前記第1推進機に前記第2範囲の推進力を発生させることを示す場合は、前記第2範囲の推進力を発生させる転舵角度に前記第1推進機を移動させ且つ、前記第1範囲の推進力を発生させる転舵角度に前記第2推進機を移動させる、請求項7に記載の船舶推進システムの制御装置。
【請求項9】
前記制御部は、横移動モードの開始が指示された場合において、前記決定情報と横移動の操船指示とに基づいて、前記第1推進機および前記第2推進機を制御する、請求項7または8に記載の船舶推進システムの制御装置。
【請求項10】
前記制御部は、前記操船指示に基づき前記第1推進機および前記第2推進機を制御する際、前記第1範囲の推進力を発生させる転舵角度に前記第1推進機を制御する場合は、前記第2推進機の転舵角度を、前記第2範囲の推進力を発生させる転舵角度に維持し、前記第2範囲の推進力を発生させる転舵角度に前記第1推進機を制御する場合は、前記第2推進機の転舵角度を、前記第1範囲の推進力を発生させる転舵角度に維持する、請求項9に記載の船舶推進システムの制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶推進システムの制御装置および方法、船舶に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
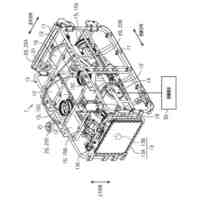
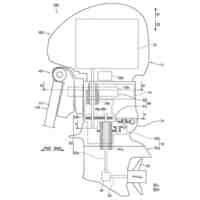
従来、船尾に配置された船外機等の推進機(以下、後推進機という)とは別に、船尾より前に配置されたトローリングモータ等の推進機(以下、前推進機という)を備える船舶推進システムが知られている。例えば、特許文献1の船舶は、船尾の船外機と船首のトローリングモータとを用いて横移動を実現している。
【0003】
一般に、船外機のように正転と逆転が可能な推進機や、トローリングモータのように360度以上の転舵可能角度を有する推進機は、前進方向と後進方向のいずれにも推進力を発生させることができる。
【0004】
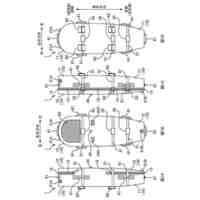
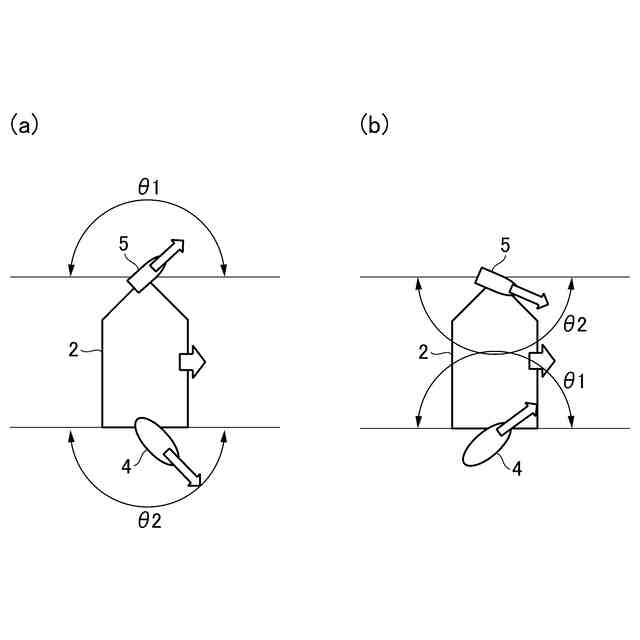
そして横移動時には、前推進機の転舵角度と後推進機の転舵角度との組み合わせによって、前推進機、後推進機のそれぞれにおける、前進方向の成分を含む推進力(以下、前進推進力)と後進方向の成分を含む推進力(以下、後進推進力)のいずれを用いても、横移動が実現可能である。
【0005】
例えば、右横移動するための組み合わせの1つ目は、後推進機が斜め右後方の推進力を発生させ、前推進機が斜め右前方の推進力を発生させる組合わせである。組み合わせの2つ目は、後推進機が斜め右前方の推進力を発生させ、前推進機が斜め右後方の推進力を発生させる組合わせである。
【先行技術文献】
【特許文献】
【0006】
米国特許第9988134号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、横移動の実行中に、後推進機に、前進推進力と後進推進力のいずれを発生させるかをコントローラが随時判定して切り替える構成であると、後推進機のシフト位置の切り替えが頻繁に生じる可能性がある。また、仮に、前推進機と後推進機との推進力差が大き過ぎると、前後方向の推進力を相殺するために、推進力の大きい方の推進機において出力のオンとオフが頻繁に繰り返される可能性がある。これらのように、船舶の横移動が円滑でなくなる場合がある。
【0008】
本発明は、横移動を円滑にすることができる船舶推進システムの制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この発明の一態様による船舶推進システムの制御装置は、船体における船尾に配置され、転舵可能な第1推進機と、前記船体における船尾よりも前の位置に配置され、転舵可能な第2推進機と、前記第1推進機の前進方向の推進力に関する情報と前記第1推進機の後進方向の推進力に関する情報と前記第2推進機の推進力に関する情報とを取得する取得部と、取得された前記第1推進機の前進方向の推進力に関する情報と前記第1推進機の後進方向の推進力に関する情報と前記第2推進機の推進力に関する情報とに基づいて、前記船体の横移動時において、前記第1推進機に、前進方向の成分を含む範囲である第1範囲の推進力を発生させるか、それとも後進方向の成分を含む範囲である第2範囲の推進力を発生させるかを決定する決定部と、前記決定部により決定された内容を決定情報として記憶媒体に格納する格納処理部と、を有する。
【0010】
この構成によれば、船体における船尾に配置され転舵可能な第1推進機の前進方向の推進力に関する情報と、第1推進機の後進方向の推進力に関する情報と、船体における船尾よりも前の位置に配置され転舵可能な第2推進機の推進力に関する情報とが取得される。取得された第1推進機の前進方向の推進力に関する情報と第1推進機の後進方向の推進力に関する情報と第2推進機の推進力に関する情報とに基づいて、船体の横移動時において、第1推進機に、前進方向の成分を含む範囲である第1範囲の推進力を発生させるか、それとも後進方向の成分を含む範囲である第2範囲の推進力を発生させるかが決定され、決定された内容が決定情報として記憶媒体に格納される。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
川下り用船
3か月前
個人
発電船
4か月前
個人
シーアンカー
5か月前
個人
船用横揺防止具
19日前
個人
流体抵抗低減省エネ船
11か月前
小柳建設株式会社
台船
6か月前
ウラカミ合同会社
曳航ロボット
6か月前
炎重工株式会社
浮標
1か月前
炎重工株式会社
浮標
1か月前
炎重工株式会社
移動体
4か月前
個人
水陸両用移動装置
6か月前
個人
船舶
1か月前
オーケー工業株式会社
係留フック
5日前
ダイハツ工業株式会社
ジャケット
7か月前
個人
キャタピラ推進式高速船
10か月前
トヨタ自動車株式会社
ガンネル治具
9か月前
誠加興業股分有限公司
呼吸用マスク
6か月前
常石造船株式会社
メタノール燃料船
2か月前
個人
海洋「いかだ」上の風力発電システム
11か月前
株式会社テラサン
位置保持システム
4か月前
ヤマハ発動機株式会社
船外機
1か月前
川崎汽船株式会社
ドライアイス輸送船
8か月前
炎重工株式会社
自律航行浮遊体
1か月前
藤倉コンポジット株式会社
架台
2か月前
株式会社神戸タフ興産
船舶の甲板構造
3か月前
株式会社大林組
水中潜行システム
1か月前
ヤマハ発動機株式会社
船外機および船舶
27日前
ヤマハ発動機株式会社
船外機および船舶
1か月前
個人
搬送器材
11か月前
株式会社大林組
浮体式構造物の設置方法
5日前
サームトロン株式会社
外付けスラスタ装置
11か月前
株式会社小野田産業
シェルタ
8か月前
高階救命器具株式会社
救命具
8か月前
ASTI株式会社
操作機構取付構造
3か月前
個人
水中観察ボート、曲肱システム及び動揺病軽減
9か月前
常石造船株式会社
メタノール燃料コンテナ船
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ