TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025019837
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123681
出願日
2023-07-28
発明の名称
制御装置、工作機械、加工経路生成方法、コンピュータプログラム及び記憶媒体
出願人
ブラザー工業株式会社
代理人
個人
,
個人
主分類
G05B
19/409 20060101AFI20250131BHJP(制御;調整)
要約
【課題】ワークに対する工具の位置を補正する場合に、作業者がワークに工具を近づけるのか、ワークから工具を離すのかを誤認することを抑制することができる制御装置等を提供する。
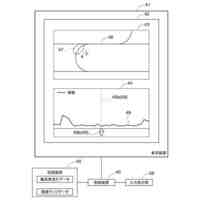
【解決手段】制御装置は、複数の基準点に基づいて定まるマスターワークの表面に沿った基準経路に基づいて、前記マスターワークの表面への主軸の移動動作を実行することにより、前記主軸の加工経路を生成し、生成した前記加工経路を表示画面に表示する第一表示処理実行部と、前記加工経路の少なくとも一部の選択を受け付ける選択受付部と、前記選択受付部において選択された前記加工経路に対する前記主軸の補正方向を示す矢印を、選択された前記加工経路の隣に表示する第二表示処理実行部とを備える。
【選択図】図12
特許請求の範囲
【請求項1】
複数の基準点に基づいて定まるマスターワークの表面に沿った基準経路に基づいて、前記マスターワークの表面への主軸の移動動作を実行することにより、前記主軸の加工経路を生成する制御装置において、
生成した前記加工経路を表示画面に表示する第一表示処理実行部と、
前記加工経路の少なくとも一部の選択を受け付ける選択受付部と、
前記選択受付部において選択された前記加工経路に対する前記主軸の補正方向を示す矢印を、選択された前記加工経路の隣に表示する第二表示処理実行部と
を備える
制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記基準経路に沿って、前記マスターワークの表面への前記主軸の接近動作を実行する第一移動実行部と、
前記第一移動実行部による接近動作時に前記主軸に装着したエンドエフェクタが前記表面に接触した場合、前記主軸の座標を取得する取得部と、
前記取得部で前記主軸の座標を取得後、前記基準経路に対して前記主軸の離隔動作を実行する第二移動実行部と、
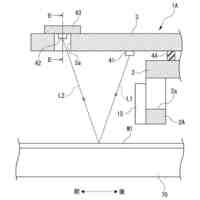
前記第一移動実行部による接近動作及び前記第二移動実行部による離隔動作が繰り返し実行され、前記接近動作時に前記エンドエフェクタが前記表面に接触した場合の前記主軸の座標である接触時座標が前記取得部によって取得されることにより、複数の前記接触時座標に基づき、前記主軸の前記加工経路を生成する生成部と、
前記選択受付部にて選択された前記加工経路について、前記接近動作開始時における前記主軸の座標である接近開始座標から前記接触時座標に向かう接近ベクトルに基づき、前記補正方向を演算する補正方向演算部と
を備え、
前記第一表示処理実行部は、前記生成部によって生成された前記加工経路を表示画面に表示し、
前記第二表示処理実行部は、前記補正方向演算部によって演算された前記補正方向を示す矢印を、前記選択受付部において選択された前記加工経路の隣に表示する
請求項1に記載の制御装置。
【請求項3】
前記補正方向は、前記接近ベクトルと同方向の第一方向を有し、
前記第二表示処理実行部は、前記第一方向の矢印を表示する
請求項2に記載の制御装置。
【請求項4】
前記第二表示処理実行部は、前記第一方向の矢印の隣に正記号を表示する
請求項3に記載の制御装置。
【請求項5】
前記補正方向は、前記接近ベクトルの逆方向の第二方向を有し、
前記第二表示処理実行部は、前記第二方向の矢印を表示する
請求項2に記載の制御装置。
【請求項6】
前記第二表示処理実行部は、前記第二方向の矢印の隣に負記号を表示する
請求項5に記載の制御装置。
【請求項7】
前記補正方向は、前記接近ベクトルと同方向の第一方向と、前記接近ベクトルの逆方向の第二方向とを有し、
前記第二表示処理実行部は、前記第一方向の矢印及び前記第二方向の矢印を表示する
請求項2に記載の制御装置。
【請求項8】
前記第一方向の矢印及び前記第二方向の矢印の色は異なる
請求項7に記載の制御装置。
【請求項9】
前記加工経路の座標を補正する補正量を受け付ける補正量受付部を備え、
前記第一表示処理実行部は、前記補正量受付部にて受け付けた補正量が適用された前記加工経路を表示する
請求項1から8のいずれか一つに記載の制御装置。
【請求項10】
前記加工経路の座標を補正する補正量を受け付ける補正量受付部を備え、
前記第一表示処理実行部は、前記補正量受付部にて受け付けた補正量が適用された前記加工経路を表示するものであり、
前記補正量受付部は、更に、各接触時座標に対する補正量を受け付け可能である
請求項2に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本技術は、ワークを加工する加工経路を生成する制御装置、工作機械、加工経路生成方法、コンピュータプログラム及び記憶媒体に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ワークに対する工具の刃先の位置を補正可能な数値制御装置が提案されている。数値制御装置は、工具補正値設定ボタンとして、「+入力 追込み」、「+入力 逃げ」を備える。作業者は、「+入力 追込み」を使用することによって、工具の刃先をワークに近づけることができ、「+入力 逃げ」を使用することによって、工具の刃先をワークから離すことができる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-55368号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業者は表示器を見て、「+入力 追込み」、「+入力 逃げ」を操作する。表示器には、ワーク及び工具が表示されておらず、座標が表示されている。作業者はワークに対する工具の位置を認識しにくく、工具の刃先をワークに近づけるべき場合に、誤って「+入力 逃げ」を使用するか、又は、工具の刃先をワークから離すべき場合に、誤って「+入力 追込み」を使用するおそれがある。
【0005】
本開示は斯かる事情に鑑みてなされたものであり、ワークに対する工具の位置を補正する場合に、作業者がワークに工具を近づけるのか、ワークから工具を離すのかを誤認することを抑制することができる制御装置、工作機械、加工経路生成方法、コンピュータプログラム及び記憶媒体を提供することを目的とする。
【課題を解決するための手段】
【0006】
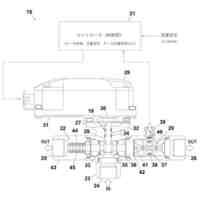
本開示の一実施形態に係る制御装置は、複数の基準点に基づいて定まるマスターワークの表面に沿った基準経路に基づいて、前記マスターワークの表面への主軸の移動動作を実行することにより、前記主軸の加工経路を生成する制御装置において、生成した前記加工経路を表示画面に表示する第一表示処理実行部と、前記加工経路の少なくとも一部の選択を受け付ける選択受付部と、前記選択受付部において選択された前記加工経路に対する前記主軸の補正方向を示す矢印を、選択された前記加工経路の隣に表示する第二表示処理実行部とを備える。
【0007】
本開示においては、表示画面に加工経路を表示する。作業者は加工経路の少なくとも一部を選択する。選択された加工経路の隣に、補正方向を示す矢印を表示する。
【0008】
本開示の一実施形態に係る制御装置は、前記基準経路に沿って、前記マスターワークの表面への前記主軸の接近動作を実行する第一移動実行部と、前記第一移動実行部による接近動作時に前記主軸に装着したエンドエフェクタが前記表面に接触した場合、前記主軸の座標を取得する取得部と、前記取得部で前記主軸の座標を取得後、前記基準経路に対して前記主軸の離隔動作を実行する第二移動実行部と、前記第一移動実行部による接近動作及び前記第二移動実行部による離隔動作が繰り返し実行され、前記接近動作時に前記エンドエフェクタが前記表面に接触した場合の前記主軸の座標である接触時座標が前記取得部によって取得されることにより、複数の前記接触時座標に基づき、前記主軸の前記加工経路を生成する生成部と、前記選択受付部にて選択された前記加工経路について、前記接近動作開始時における前記主軸の座標である接近開始座標から前記接触時座標に向かう接近ベクトルに基づき、前記補正方向を演算する補正方向演算部とを備え、前記第一表示処理実行部は、前記生成部によって生成された前記加工経路を表示画面に表示し、前記第二表示処理実行部は、前記補正方向演算部によって演算された前記補正方向を示す矢印を、前記選択受付部において選択された前記加工経路の隣に表示する。
【0009】
本開示においては、表示画面に加工経路を表示する。作業者は加工経路の少なくとも一部を選択する。選択された加工経路の隣に、補正方向を示す矢印を表示する。
【0010】
本開示の一実施形態に係る制御装置は、前記補正方向は、前記接近ベクトルと同方向の第一方向を有し、前記第二表示処理実行部は、前記第一方向の矢印を表示する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
1か月前
コフロック株式会社
流量制御装置
1か月前
トヨタ自動車株式会社
自律移動体
1か月前
トヨタ自動車株式会社
配送システム
3か月前
株式会社丸和製作所
入力機器
1か月前
株式会社クボタ
作業車
1か月前
スター精密株式会社
工作機械
2日前
株式会社フジキン
流体制御装置
3か月前
アズビル株式会社
パラメータ調整装置
2か月前
株式会社豊田自動織機
荷役車両
28日前
株式会社明電舎
車両
1か月前
株式会社フジキン
流量制御装置
1か月前
株式会社シンテックホズミ
搬送ロボット
17日前
株式会社村田製作所
温度補償回路
1か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ロボットシステム
2か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
7日前
株式会社ダイフク
物品搬送設備
21日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
キヤノン株式会社
情報処理装置
2か月前
ローム株式会社
電源回路
3か月前
旭精機工業株式会社
監視データ処理装置
1か月前
東フロコーポレーション株式会社
流量制御装置
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
トヨタ自動車株式会社
自律走行装置
7日前
株式会社ダイフク
情報表示システム
2か月前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
株式会社日立製作所
移動体制御システム
3か月前
株式会社ディスコ
搬送車
2か月前
ローム株式会社
半導体装置
7日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ