TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018813
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122828
出願日
2023-07-27
発明の名称
電動工具、及びそれを備える工具システム
出願人
パナソニック株式会社
代理人
弁理士法人北斗特許事務所
主分類
B23P
19/06 20060101AFI20250130BHJP(工作機械;他に分類されない金属加工)
要約
【課題】作業対象に対して不適切な姿勢で作業が行われる可能性を低減可能な電動工具、及びそれを備える工具システムを提供する。
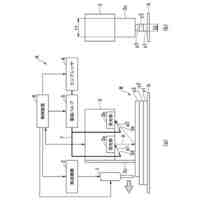
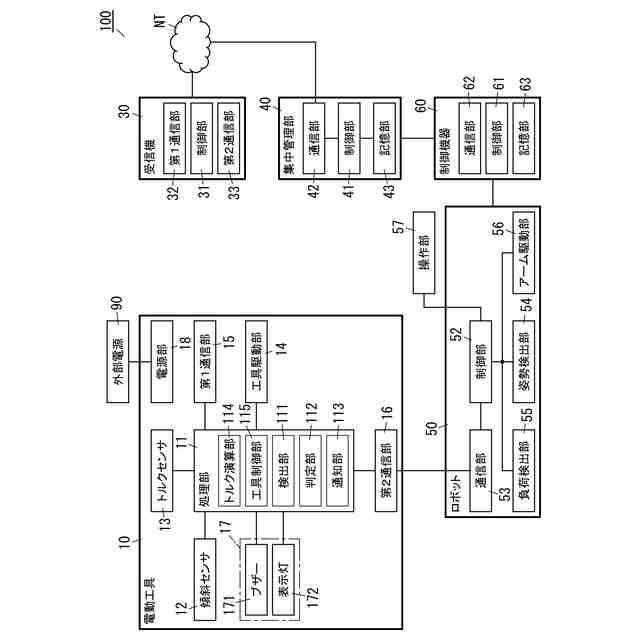
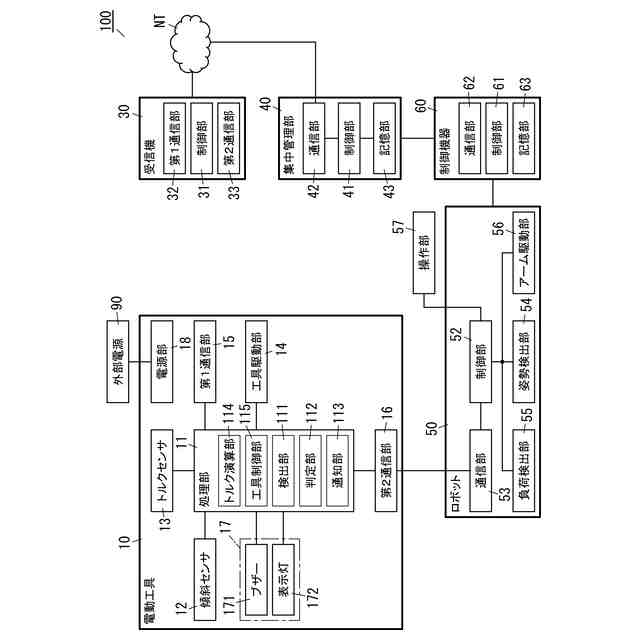
【解決手段】電動工具10は、工具本体と、出力軸と、先端工具と、検出部111と、判定部112と、通知部113と、を備える。工具本体は、ロボットアームに保持される。出力軸は、工具本体に回転可能に支持される。出力軸は、モータの回転に応じて回転する。先端工具は、出力軸に取付可能である。検出部111は、ロボットアームが動かされることによって出力軸が作業位置に移動した状態で出力軸の向きを検出する。判定部112は、検出部111によって検出された出力軸の向きの、作業位置での設定方向に対する傾斜角度を判定する。通知部113は、判定部112の判定結果を通知する。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットアームに保持される工具本体と、
前記工具本体に回転可能に支持され、モータの回転に応じて回転する出力軸と、
前記出力軸に取付可能な先端工具と、
前記ロボットアームが動かされることによって前記出力軸が作業位置に移動した状態で前記出力軸の向きを検出する検出部と、
前記検出部によって検出された前記出力軸の向きの、前記作業位置での設定方向に対する傾斜角度を判定する判定部と、
前記判定部の判定結果を通知する通知部と、を備える、
電動工具。
続きを表示(約 710 文字)
【請求項2】
前記判定部は、前記傾斜角度の大きさが許容角度以下であるか否かを判定する、
請求項1に記載の電動工具。
【請求項3】
前記通知部は、前記判定部の判定結果を音で通知する、
請求項1に記載の電動工具。
【請求項4】
前記通知部は、前記傾斜角度の大きさに応じて、出力する音の態様を変化させる、
請求項3に記載の電動工具。
【請求項5】
前記通知部は、前記判定部の判定結果を光で通知する、
請求項1に記載の電動工具。
【請求項6】
外部から入力される切替信号に基づいて、前記通知部が通知を行う姿勢通知モード、及び、前記通知部による通知を停止する非通知モードのいずれかに切り替える処理部を備える、
請求項1に記載の電動工具。
【請求項7】
請求項1~6のいずれか1項に記載の電動工具と、
多関節型のロボットアームを有するロボットと、を備え、
前記ロボットアームに前記電動工具が保持されている、
工具システム。
【請求項8】
工具本体と、
前記工具本体に回転可能に支持され、モータの回転に応じて回転する出力軸と、
前記出力軸に取付可能な先端工具と、
前記先端工具が作業位置に位置する状態で前記出力軸の向きを検出する検出部と、
前記検出部によって検出された前記出力軸の向きの、前記作業位置での設定方向に対する傾斜角度を判定する判定部と、
前記判定部の判定結果を通知する通知部と、を備える、
電動工具。
発明の詳細な説明
【技術分野】
【0001】
本開示は、電動工具、及びそれを備える工具システムに関する。より詳細には、本開示は、ロボットアームに保持される電動工具、及びそれを備える工具システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1は、孔明け用のエンドエフェクターと、エンドエフェクターを腕に保持させた産業用ロボットと、を備える自動孔明け装置を開示する。
【先行技術文献】
【特許文献】
【0003】
実開平4-51315号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された産業用ロボットに教示を行う際に、作業者が産業用ロボットの腕を手で持って動かすことで、産業用ロボットに教示を行うダイレクトティーチングという手法がある。教示作業の際に、産業用ロボットの腕に保持されたエンドエフェクターの向きが、孔を開ける方向に対して傾いていると、教示を正しく行うことができない可能性がある。また、教示作業の際に、エンドエフェクターの向きが、孔を開ける方向から傾いていると、作業対象に対して不適切な姿勢で作業が行われる可能性がある。
【0005】
本開示の目的は、作業対象に対して不適切な姿勢で作業が行われる可能性を低減可能な電動工具、及びそれを備える工具システムを提供することにある。
【課題を解決するための手段】
【0006】
本開示の一態様の電動工具は、工具本体と、出力軸と、先端工具と、検出部と、判定部と、通知部と、を備える。前記工具本体はロボットアームに保持される。前記出力軸は、前記工具本体に回転可能に支持され、モータの回転に応じて回転する。前記先端工具は前記出力軸に取付可能である。前記検出部は、前記ロボットアームが動かされることによって前記出力軸が作業位置に移動した状態で前記出力軸の向きを検出する。前記判定部は、前記検出部によって検出された前記出力軸の向きの、前記作業位置での設定方向に対する傾斜角度を判定する。前記通知部は、前記判定部の判定結果を通知する。
【0007】
本開示の一態様の工具システムは、前記電動工具と、多関節型のロボットアームを有するロボットと、を備える。前記ロボットアームに前記電動工具が保持されている。
【0008】
本開示の一態様の電動工具は、工具本体と、出力軸と、先端工具と、検出部と、判定部と、通知部と、を備える。前記出力軸は、前記工具本体に回転可能に支持され、モータの回転に応じて回転する。前記先端工具は前記出力軸に取付可能である。前記検出部は、前記先端工具が作業位置に位置する状態で前記出力軸の向きを検出する。前記判定部は、前記検出部によって検出された前記出力軸の向きの、前記作業位置での設定方向に対する傾斜角度を判定する。前記通知部は、前記判定部の判定結果を通知する。
【発明の効果】
【0009】
本開示によれば、作業対象に対して不適切な姿勢で作業が行われる可能性を低減可能な電動工具、及びそれを備える工具システムを提供することができる。
【図面の簡単な説明】
【0010】
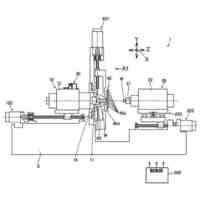
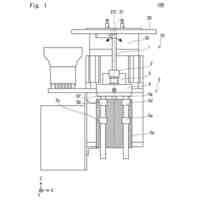
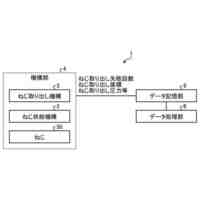
図1は、本開示の実施形態1に係る電動工具を備える工具システムの概略的なブロック図である。
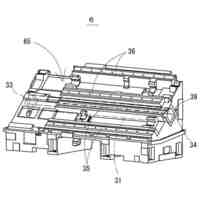
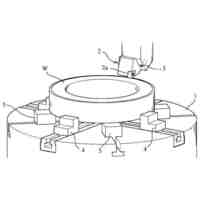
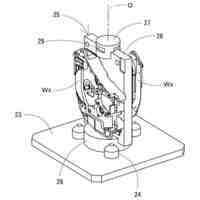
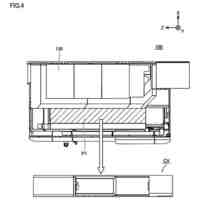
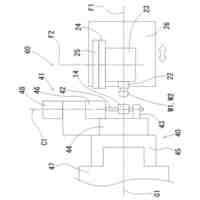
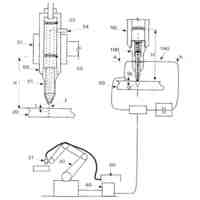
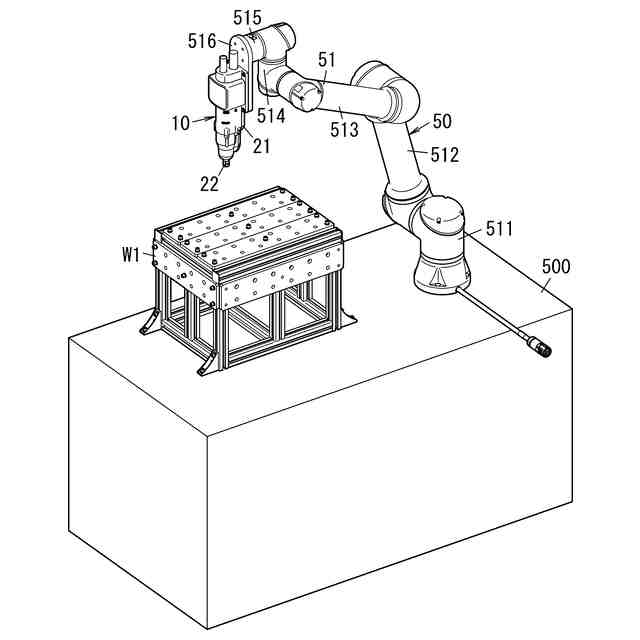
図2は、同上の電動工具が取り付けられたロボットの外観斜視図である。
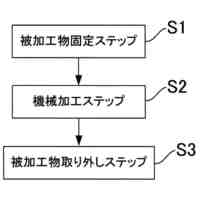
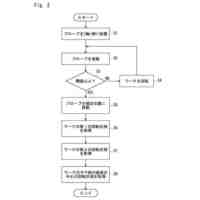
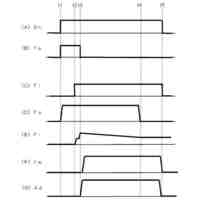
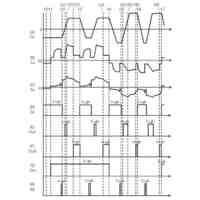
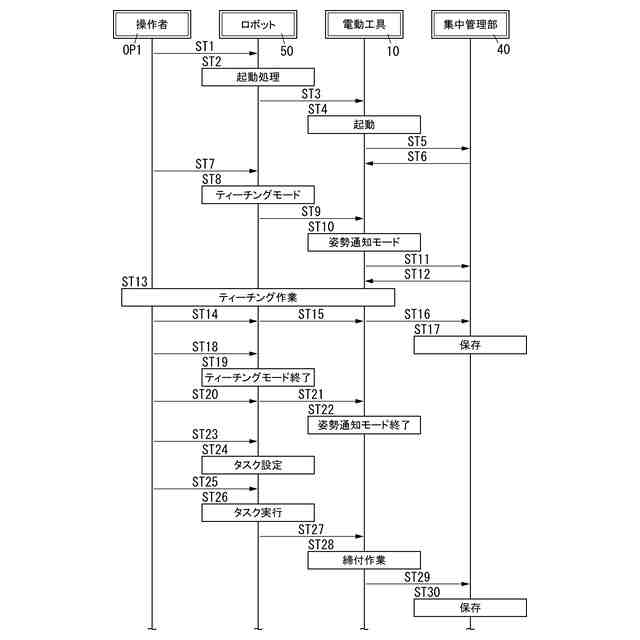
図3は、同上の工具システムの動作を説明するシーケンス図である。
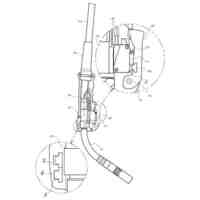
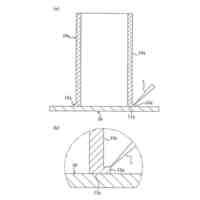
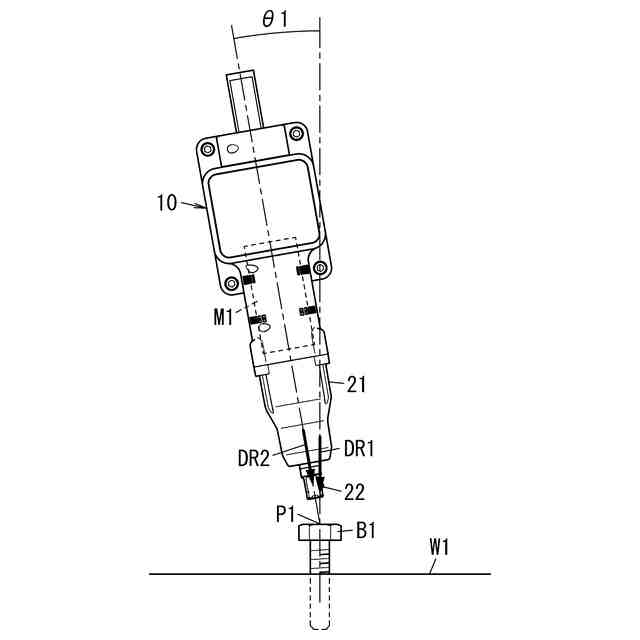
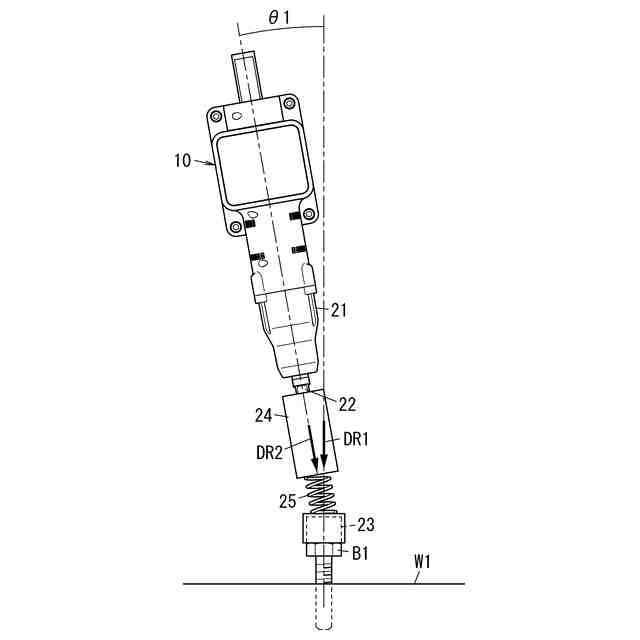
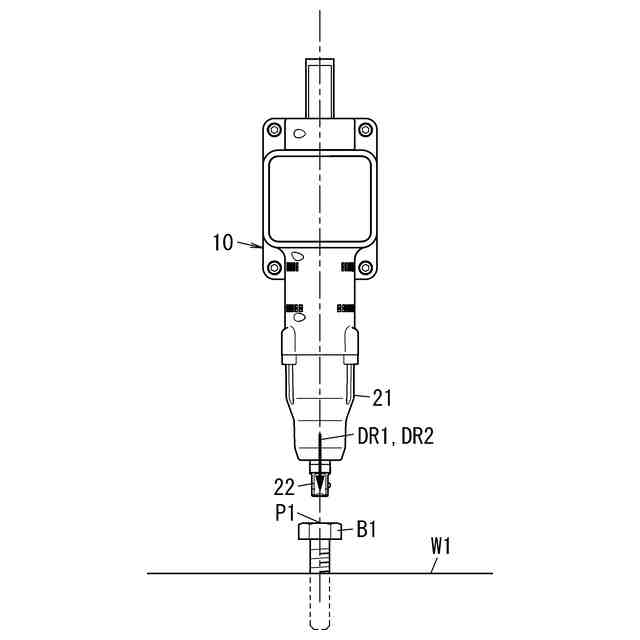
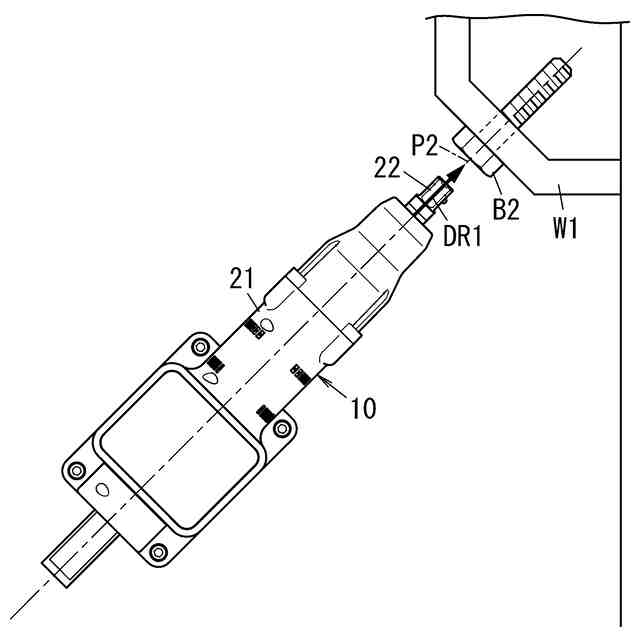
図4は、同上の工具システムにおいて、ダイレクトティーチングを行う際の電動工具の姿勢を示す側面図である。
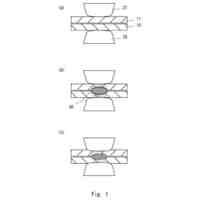
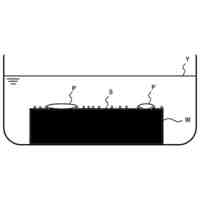
図5は、比較例の工具システムの作業状態を示す側面図である。
図6は、同上の工具システムにおいて、ダイレクトティーチングを行う際の電動工具の姿勢を示す側面図である。
図7は、同上の工具システムにおいて、ダイレクトティーチングを行う際の電動工具の姿勢を示す側面図である。
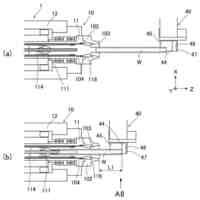
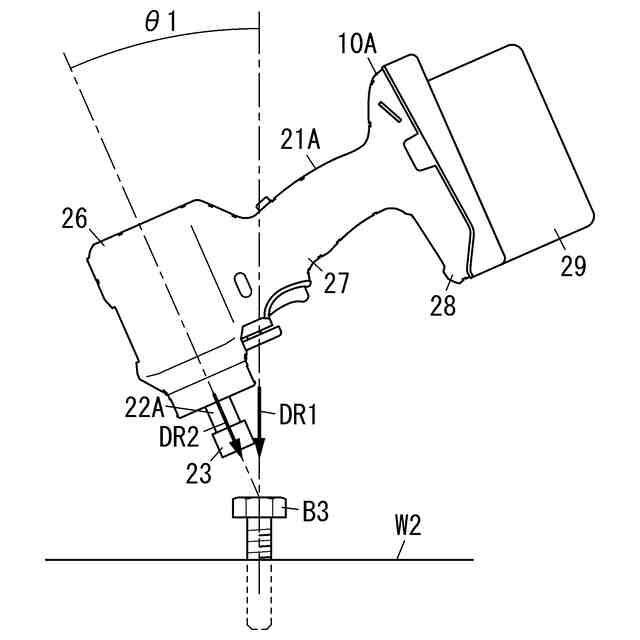
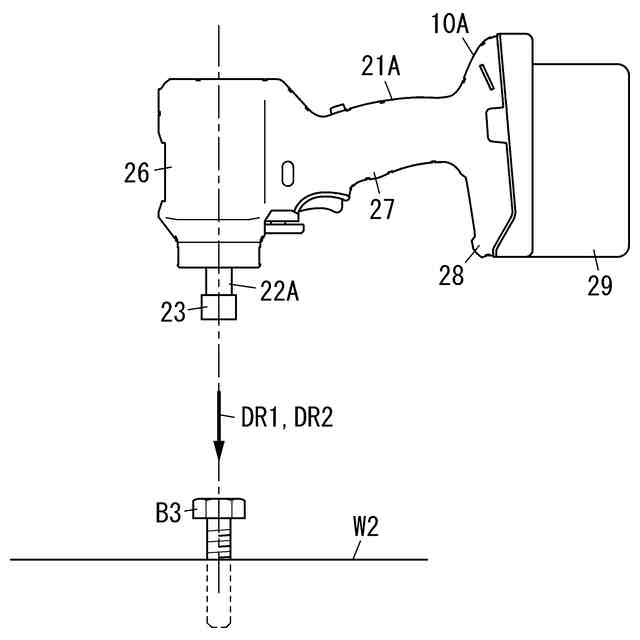
図8は、本開示の実施形態2に係る電動工具を用いた作業姿勢を示す側面図である。
図9は、同上の電動工具を用いた作業姿勢を示す側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
スラッジ除去装置
13日前
株式会社FUJI
工作機械
14日前
個人
複合金属回転式ホーン
13日前
株式会社ツガミ
工作機械
12日前
株式会社トーキン
溶接用トーチ
19日前
株式会社ツガミ
工作機械
23日前
トヨタ自動車株式会社
積層コア
1か月前
トヨタ自動車株式会社
取付装置
13日前
トヨタ自動車株式会社
検査方法
23日前
株式会社メドメタレックス
ドリル
1か月前
株式会社オーエム製作所
工作機械
26日前
株式会社FUJI
自動化用パレット
1か月前
株式会社ダイヘン
溶接トーチ
12日前
株式会社関本管工
エルボ管保持装置
19日前
株式会社ダイヘン
溶接トーチ
12日前
サムテック株式会社
加工物製造方法
1か月前
トヨタ自動車株式会社
位相測定方法
1か月前
三菱電機株式会社
ねじ取り出し装置
27日前
DMG森精機株式会社
工作機械
23日前
株式会社不二越
工具の製造方法
1か月前
株式会社不二越
超硬合金製ドリル
27日前
津田駒工業株式会社
バリ取り用スピンドル装置
13日前
トヨタ自動車株式会社
スパッタ検出方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
13日前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
三菱マテリアル株式会社
表面被覆切削工具
1か月前
三恵技研工業株式会社
金属部品の製造方法
1か月前
株式会社不二越
スカイビングカッタ
1か月前
北井産業株式会社
ギヤ切削加工装置
1か月前
清水建設株式会社
積層造形装置
1か月前
トヨタ自動車株式会社
銅切削屑の一体化方法
19日前
株式会社ダイヘン
交流消耗電極アーク溶接制御方法
13日前
トヨタ自動車株式会社
銅切削屑の一体化方法
13日前
株式会社ダイヘン
交流消耗電極アーク溶接制御方法
1か月前
株式会社WEL-KEN
ティーチングツール
1か月前
ダイハツ工業株式会社
組付け装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ