TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018432
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122128
出願日
2023-07-27
発明の名称
車載装置、路側装置、システム、制御方法およびコンピュータプログラム
出願人
住友電気工業株式会社
,
住友電装株式会社
,
株式会社オートネットワーク技術研究所
代理人
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250130BHJP(信号)
要約
【課題】車両間の通信機能を持たない車両が存在し得る状況において、車両の円滑な進路変更を可能とする車載装置、路側装置、システム、制御方法およびコンピュータプログラムを提供する。
【解決手段】車載装置は、車両に搭載される車載装置であって、道路上の対象領域を走行している、車両と異なる他車両の位置情報および行動予定、ならびに、他車両の周りに位置する周辺車両の行動予測を他車両から受信する受信部と、車両の進入予定領域を決定する予定領域決定部と、受信部により位置情報を受信できない非通信車両に関する行動予測を決定する行動予測決定部と、行動予測決定部により決定された行動予測の信頼度を決定する信頼度決定部と、信頼度が所定のしきい値以上であるか否かを判定する判定部と、判定部により、信頼度がしきい値以上であると判定されたことを受けて、行動予測決定部により決定された行動予測を利用して、車両の行動計画を生成する生成部とを含む。
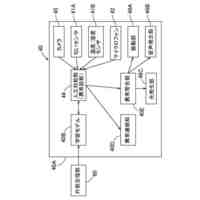
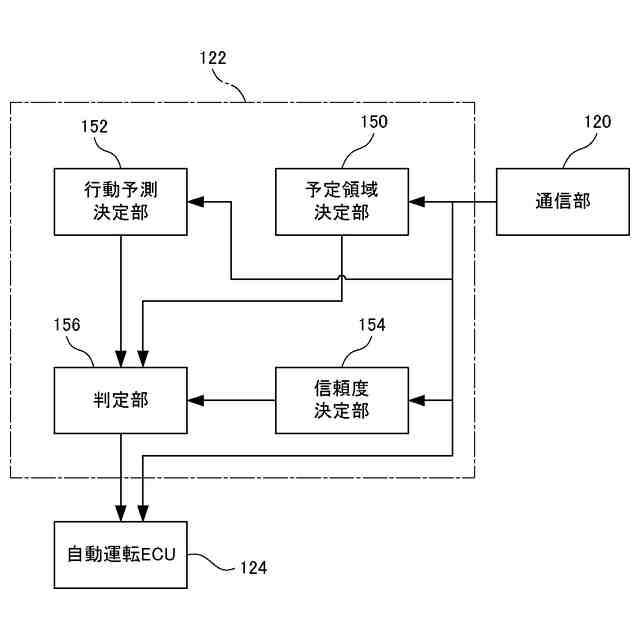
【選択図】図4
特許請求の範囲
【請求項1】
車両に搭載される車載装置であって、
道路上の対象領域を走行している、前記車両と異なる他車両の位置情報および行動予定、ならびに、前記他車両の周りに位置する周辺車両の行動予測を前記他車両から受信する受信部と、
前記車両の進入予定領域を決定する予定領域決定部と、
前記受信部により前記位置情報を受信できない非通信車両に関する行動予測を決定する行動予測決定部と、
前記行動予測決定部により決定された前記行動予測の信頼度を決定する信頼度決定部と、
前記信頼度が所定のしきい値以上であるか否かを判定する判定部と、
前記判定部により、前記信頼度が前記しきい値以上であると判定されたことを受けて、前記行動予測決定部により決定された前記行動予測を利用して、前記車両の行動計画を生成する生成部とを含む、車載装置。
続きを表示(約 2,500 文字)
【請求項2】
前記生成部は、前記判定部により、前記信頼度が前記しきい値未満であると判定されたことを受けて、前記行動予測決定部により決定された前記行動予測を利用せずに、前記行動計画を生成する、請求項1に記載の車載装置。
【請求項3】
前記信頼度決定部は、前記対象領域における死角の有無、前記他車両の車載センサの精度、前記周辺車両における前記行動予測を生成する演算装置の性能、前記周辺車両における前記行動予測を生成するために前記演算装置が実行するコンピュータプログラムの性能、および、天候のいずれかに基づいて、前記信頼度を決定する、請求項1または請求項2に記載の車載装置。
【請求項4】
前記行動計画に従った前記車両の前記進入予定領域への移動動作において障害となり得る前記他車両が存在するか否かを判定する障害判定部と、
前記障害判定部により、障害となり得る前記他車両が存在すると判定されたことを受けて、当該他車両に、当該他車両の走行に関する要求を送信する送信部とをさらに含む、請求項1または請求項2に記載の車載装置。
【請求項5】
前記判定部は、前記他車両が走行している本線に接続する合流路を前記車両が走行中に、前記信頼度が前記しきい値以上であるか否かを判定する、請求項1または請求項2に記載の車載装置。
【請求項6】
路側装置に、情報の要求を送信する送信部と、
前記要求に対する情報を前記路側装置から受信する受信部とを含み、
前記情報は、前記受信部により前記位置情報を受信できない非通信車両に関する行動予測と、前記行動予測の信頼度とを含み、
前記信頼度が所定のしきい値以上であるか否かを判定する判定部と、
前記判定部により、前記信頼度が前記しきい値以上であると判定されたことを受けて、前記行動予測を利用して、前記車両の行動計画を生成する生成部とをさらに含む、車載装置。
【請求項7】
情報の要求を車両から受信し、かつ、前記車両と異なる他車両の位置情報および行動予定を前記他車両から受信する受信部と、
道路上の対象領域を走行している車両を検出する検出部と、
前記要求を送信した前記車両の進入予定領域を決定する予定領域決定部と、
前記受信部により前記位置情報を受信できない非通信車両に関する行動予測を決定する行動予測決定部と、
前記行動予測決定部により決定された前記行動予測の信頼度を決定する信頼度決定部と、
前記信頼度を前記車両に送信する送信部とを含み、
前記予定領域決定部は、前記検出部により検出された前記車両の位置に基づいて前記進入予定領域を決定し、
前記行動予測決定部は、前記検出部により検出された複数の前記車両の中から、前記位置情報および前記行動予定に基づいて、前記非通信車両を特定する、路側装置。
【請求項8】
前記受信部は、前記他車両から、前記他車両の周りに位置する周辺車両の行動予測をさらに受信し、
前記行動予測決定部は、前記受信部により受信された前記行動予測を、前記非通信車両に関する行動予測の決定に利用する、請求項7に記載の路側装置。
【請求項9】
車両に搭載される第1車載装置と、
前記車両と異なる他車両に搭載される第2車載装置とを含み、
前記第2車載装置は、前記他車両の位置情報および行動予定、ならびに、前記他車両の周りに位置する周辺車両の行動予測を外部に送信する送信部を含み、
前記第1車載装置は、
道路上の対象領域を走行している前記他車両から、前記位置情報、前記行動予定および前記行動予測を受信する受信部と、
前記車両の進入予定領域を決定する予定領域決定部と、
前記受信部により前記位置情報を受信できない非通信車両に関する行動予測を決定する行動予測決定部と、
前記行動予測決定部により決定された前記行動予測の信頼度を決定する信頼度決定部と、
前記信頼度が所定のしきい値以上であるか否かを判定する判定部と、
前記判定部により、前記信頼度が前記しきい値以上であると判定されたことを受けて、前記行動予測決定部により決定された前記行動予測を利用して、前記車両の行動計画を生成する生成部とを含む、システム。
【請求項10】
車両に搭載される車載装置と、
前記車載装置と通信する路側装置とを含み、
前記車載装置は、
前記路側装置に、情報の要求を送信する第1送信部と、
前記要求に対する情報を前記路側装置から受信する第1受信部とを含み、
前記路側装置は、
前記要求を受信し、かつ、前記車両と異なる他車両の位置情報および行動予定を前記他車両から受信する第2受信部と、
道路上の対象領域を走行している車両を検出する検出部と、
前記要求を送信した前記車両の進入予定領域を決定する予定領域決定部と、
前記第2受信部により前記位置情報を受信できない非通信車両に関する行動予測を決定する行動予測決定部と、
前記行動予測決定部により決定された前記行動予測の信頼度を決定する信頼度決定部と、
前記情報として前記行動予測および前記信頼度を前記車両に送信する第2送信部とを含み、
前記予定領域決定部は、前記検出部により検出された前記車両の位置に基づいて前記進入予定領域を決定し、
前記行動予測決定部は、前記検出部により検出された複数の前記車両の中から、前記位置情報および前記行動予定に基づいて、前記非通信車両を特定し、
前記車載装置は、
前記信頼度が所定のしきい値以上であるか否かを判定する判定部と、
前記判定部により、前記信頼度が前記しきい値以上であると判定されたことを受けて、前記行動予測を利用して、前記車両の行動計画を生成する生成部とをさらに含む、システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車載装置、路側装置、システム、制御方法およびコンピュータプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
車両および路側に設けられたカメラなどのセンサにより取得されたセンサデータを解析し、解析結果を車両の運転支援に利用するサービスが普及しつつある。そうした運転支援として、下記特許文献1には、車両が高速道路の本線へ合流する際の走行支援道路システムが開示されている。走行支援道路システムにおいて、路側装置は、高速道路を走行している車両の行動を予測する。路側装置は、それら車両が車線変更することも予測する。路側装置は、予測結果を元に、合流しようとする車両に推奨速度情報を伝えて円滑に合流できるようにする。
【先行技術文献】
【特許文献】
【0003】
特開平11-345396号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の路側装置は、高速道路の本線を走行している車両と通信しないため、本線を走行中の車両に対して、推奨速度情報の伝達および調停を実施できない。路側装置は、予測結果の信頼度を評価していないため、予測結果の使用可否の判断もしていない。そのため、提示される推奨速度情報を用いることが適切でない場合もある。
【0005】
したがって、本開示は、車両間の通信機能を持たない車両が存在し得る状況において、車両の円滑な進路変更を可能とする車載装置、路側装置、システム、制御方法およびコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示のある局面に係る車載装置は、車両に搭載される車載装置であって、道路上の対象領域を走行している、車両と異なる他車両の位置情報および行動予定、ならびに、他車両の周りに位置する周辺車両の行動予測を他車両から受信する受信部と、車両の進入予定領域を決定する予定領域決定部と、受信部により位置情報を受信できない非通信車両に関する行動予測を決定する行動予測決定部と、行動予測決定部により決定された行動予測の信頼度を決定する信頼度決定部と、信頼度が所定のしきい値以上であるか否かを判定する判定部と、判定部により、信頼度がしきい値以上であると判定されたことを受けて、行動予測決定部により決定された行動予測を利用して、車両の行動計画を生成する生成部とを含む。
【発明の効果】
【0007】
本開示によれば、車両間の通信機能を持たない車両が存在する状況において、車両の円滑な進路変更を可能とする車載装置、路側装置、システム、制御方法およびコンピュータプログラムを提供できる。
【図面の簡単な説明】
【0008】
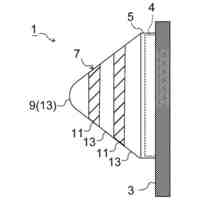
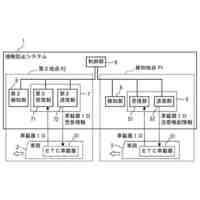
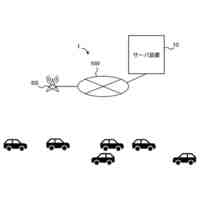
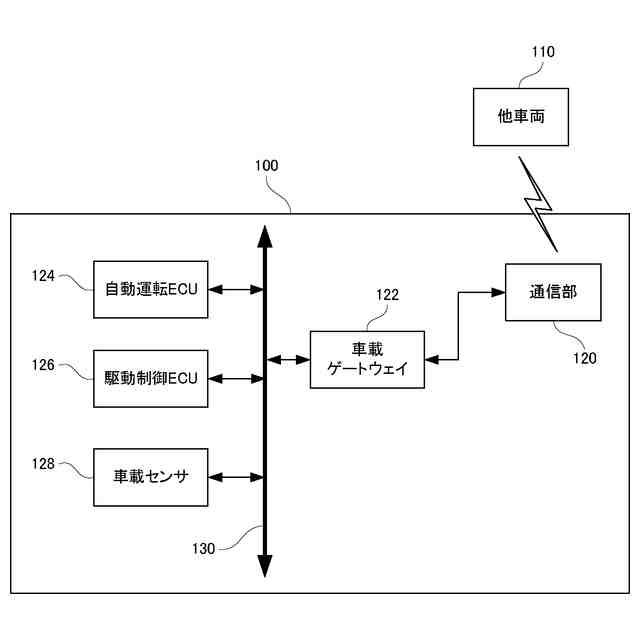
図1は、本開示の第1実施形態に係る運転支援システムの構成を示す模式図である。
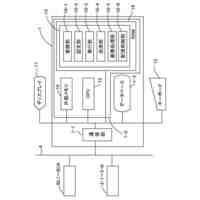
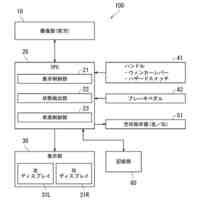
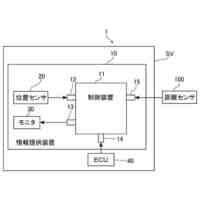
図2は、図1に示した車載装置のハードウェア構成を示すブロック図である。
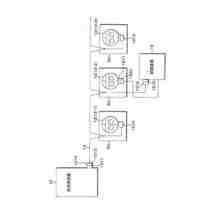
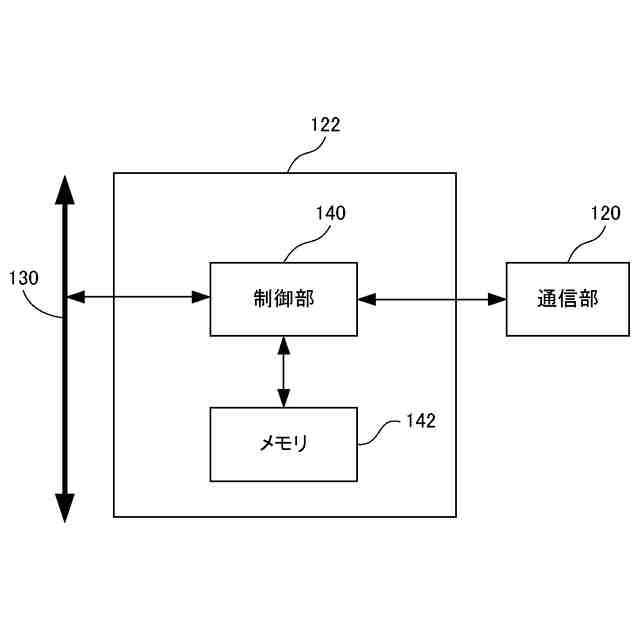
図3は、図2に示した車載ゲートウェイのハードウェア構成を示すブロック図である。
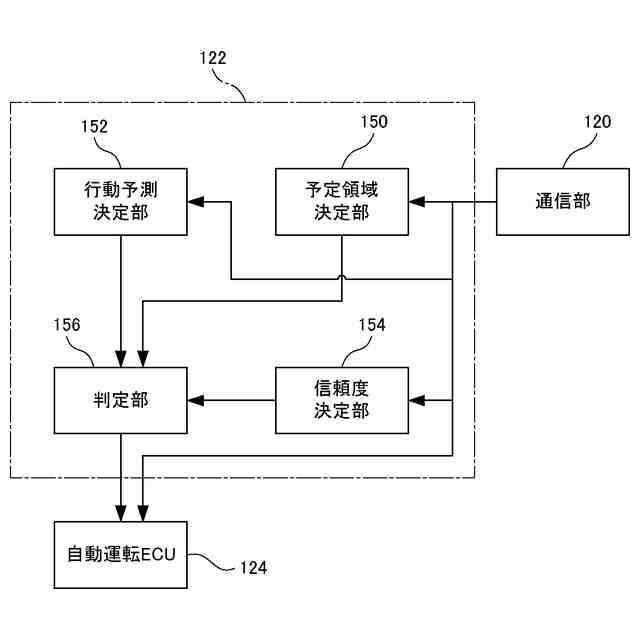
図4は、図2に示した車載ゲートウェイの機能構成を示すブロック図である。
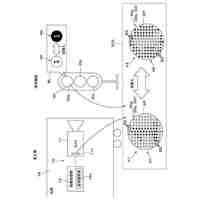
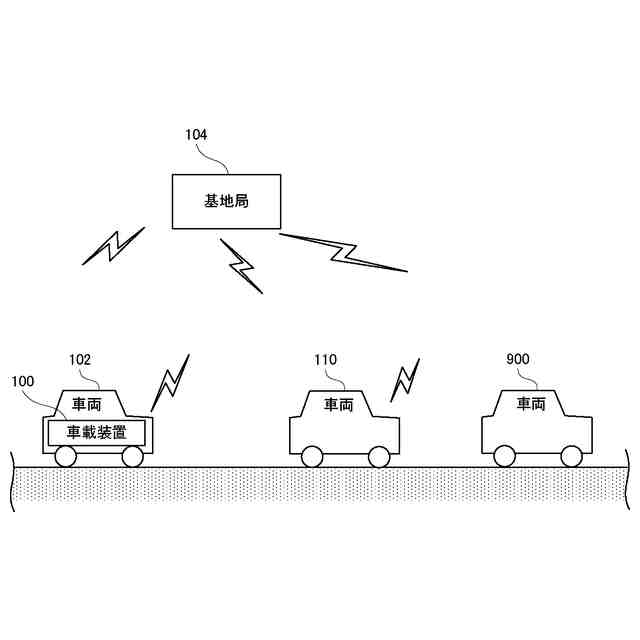
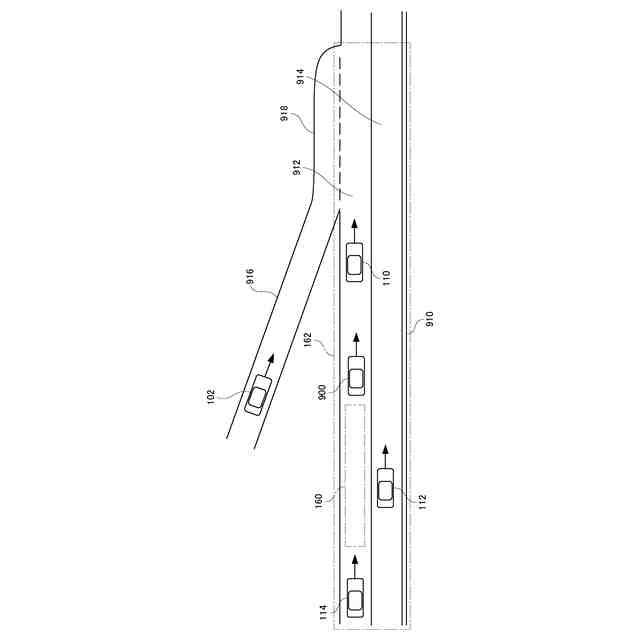
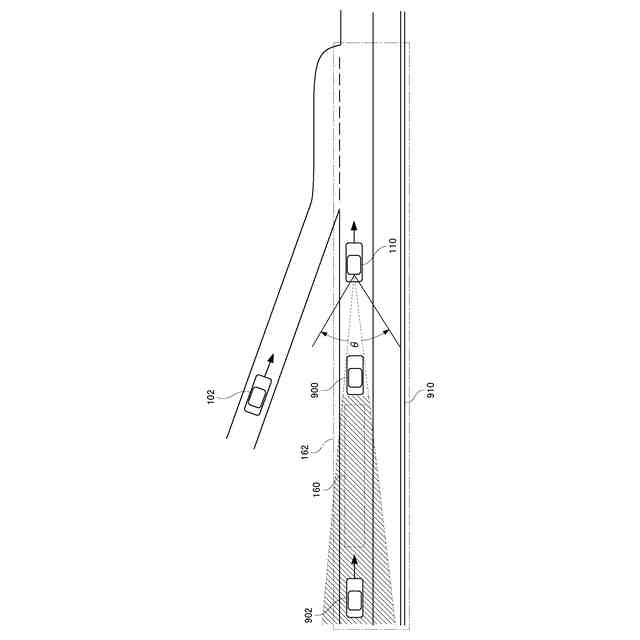
図5は、図1に示した運転支援システムによる運転支援が実行される合流点付近の道路を示す模式図である。
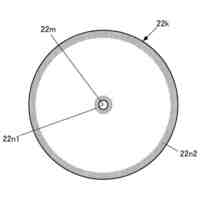
図6は、図4に示した合流点付近の本線を走行している車両の車載センサの検出範囲を示す模式図である。
図7は、図6とは別の状況において、合流点付近の本線を走行している車両の車載センサの検出範囲を示す模式図である。
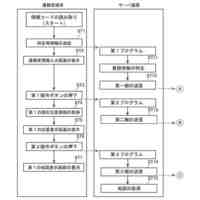
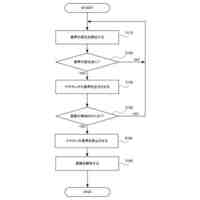
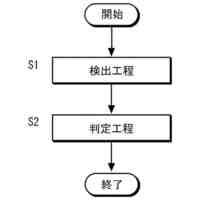
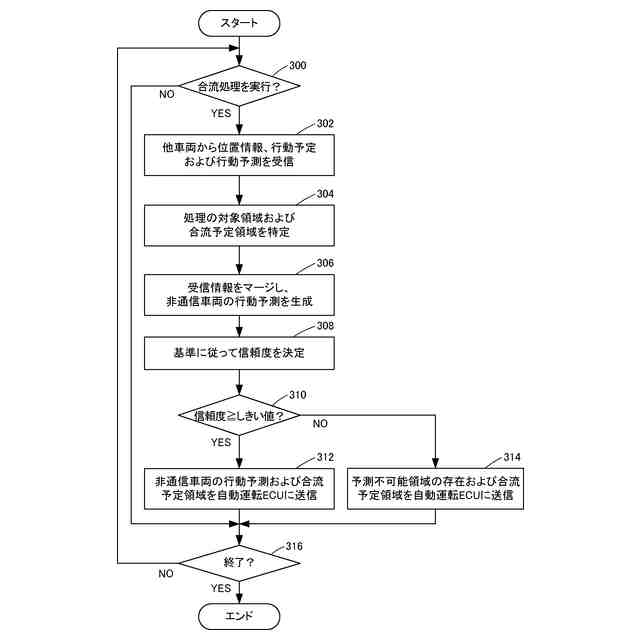
図8は、図2に示した車載ゲートウェイの動作を示すフローチャートである。
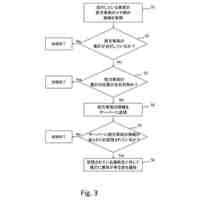
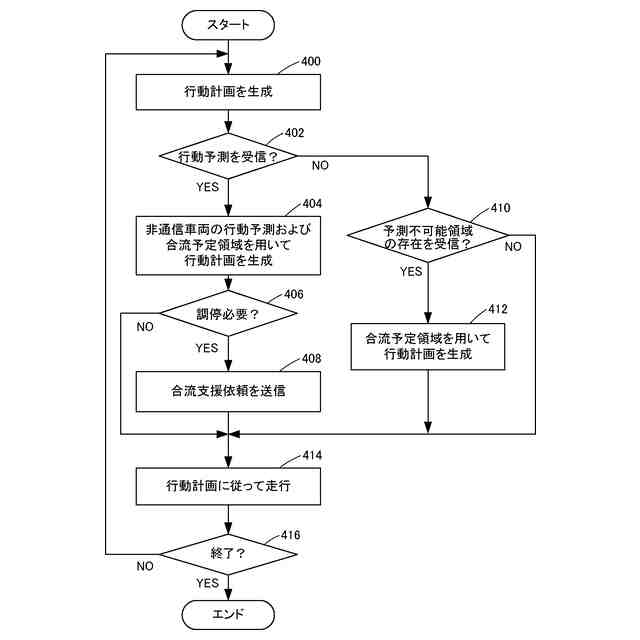
図9は、図2に示した自動運転ECU(Electronic Control Unit)の動作を示すフローチャートである。
図10は、図1に示した他車両の車載装置の動作を示すフローチャートである。
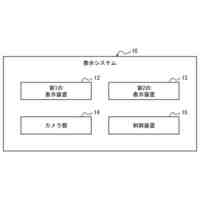
図11は、本開示の第2実施形態に係る運転支援システムの構成を示す模式図である。
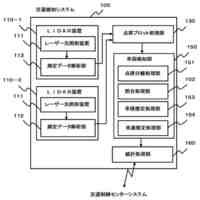
図12は、図11に示した路側装置のハードウェア構成を示すブロック図である。
図13は、図11に示した路側装置の機能構成を示すブロック図である。
図14は、図11に示した運転支援システムによる運転支援が実行される合流点付近の道路を示す模式図である。
図15は、図14に示した合流点付近に配置された路側装置のセンサの検出範囲を示す模式図である。
図16は、図14に示した合流点付近に配置された、図15とは別の路側装置のセンサの検出範囲を示す模式図である。
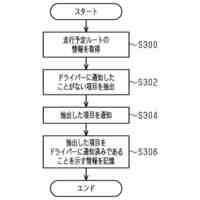
図17は、自車両の車載ゲートウェイの動作を示すフローチャートである。
図18は、路側装置の動作を示すフローチャートである。
図19は、他車両の車載装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0009】
[本開示の実施形態の説明]
本開示の実施形態の内容を列記して説明する。以下に記載する実施形態の少なくとも一部を任意に組合せてもよい。
【0010】
(1)本開示の第1の局面に係る車載装置は、車両に搭載される車載装置であって、道路上の対象領域を走行している、車両と異なる他車両の位置情報および行動予定、ならびに、他車両の周りに位置する周辺車両の行動予測を他車両から受信する受信部と、車両の進入予定領域を決定する予定領域決定部と、受信部により位置情報を受信できない非通信車両に関する行動予測を決定する行動予測決定部と、行動予測決定部により決定された行動予測の信頼度を決定する信頼度決定部と、信頼度が所定のしきい値以上であるか否かを判定する判定部と、判定部により、信頼度がしきい値以上であると判定されたことを受けて、行動予測決定部により決定された行動予測を利用して、車両の行動計画を生成する生成部とを含む。これにより、車両間の通信機能を持たない車両が存在する状況において、車両の円滑な進路変更が可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
1か月前
ニッタン株式会社
煙感知器
2か月前
個人
迷子支援システム
28日前
個人
万引き防止システム
今日
株式会社ニカデン
検出装置
14日前
株式会社サンライン
発炎筒携行容器
1か月前
ABT合同会社
詐欺防止装置
今日
株式会社あおい興産
避難誘導灯
22日前
能美防災株式会社
表示灯カバー
2か月前
アズビル株式会社
測定システム
3か月前
株式会社国際電気
防災システム
9日前
ニッタン株式会社
発信機
28日前
ニッタン株式会社
発信機
28日前
日本無線株式会社
人物探索システム
2か月前
日本信号株式会社
情報提供システム
3か月前
京セラ株式会社
案内システム及び案内方法
2か月前
能美防災株式会社
非常放送システム
2か月前
京セラ株式会社
制御装置
28日前
ホーチキ株式会社
防災システム
今日
個人
安全に飛び乗りが可能な低速自動運転車
2か月前
株式会社SUBARU
危険報知システム
今日
シャープ株式会社
表示装置
1か月前
株式会社F2Fグループ
疲労度判定方法
2か月前
トヨタ自動車株式会社
運転支援システム
2か月前
トヨタ自動車株式会社
照度推定装置
3か月前
京セラ株式会社
表示システム
2か月前
株式会社豊田自動織機
運行表示装置
15日前
トヨタ自動車株式会社
運転支援装置
2か月前
戸田建設株式会社
検知システム
1か月前
日本信号株式会社
信号システム及び信号灯器
21日前
株式会社JR西日本テクシア
接触防止システム
21日前
トヨタ自動車株式会社
情報提供システム
1か月前
株式会社創発システム研究所
交通検知システム
2か月前
株式会社小糸製作所
情報提供装置及び制御装置
今日
トヨタ自動車株式会社
渋滞検知システム
2か月前
トヨタ自動車株式会社
ドライブレコーダ
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ