TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025017182
公報種別
公開特許公報(A)
公開日
2025-02-05
出願番号
2023120133
出願日
2023-07-24
発明の名称
ロボット駆動装置、ロボット駆動方法及びロボット駆動プログラム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20250129BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】従来のロボット駆動装置では、位置制御及びトルク制御を十分に安定化させることが困難である問題があった。
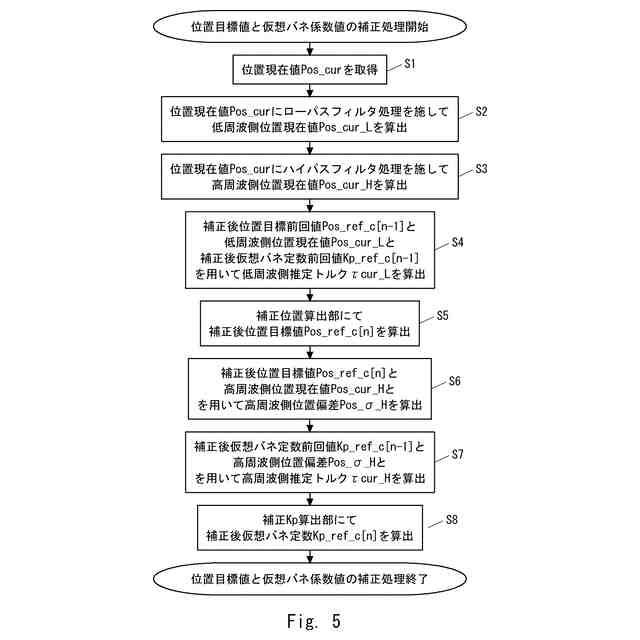
【解決手段】本発明のロボット駆動装置は、ロボットの関節に取り付けられたモータに与える駆動電流を制御指令値に応じて増減させるとともに、前記モータの回転角に対応する位置現在値を出力するモータ駆動回路と、前記制御指令値を生成する制御指令値生成部と、制御指令値生成部の周期処理と同期した周期で、位置目標値及び仮想バネ定数を補正した補正後位置目標値及び補正後仮想バネ定数を前記制御指令値生成回路に出力する補正処理部と、を有し、前記補正処理部において、モータに与えられる外乱のうち周波数が低い外乱に対しては位置目標値に対して補正を加える位置制御手法を適用し、周波数が高い外乱に対しては仮想バネ定数に補正を加える仮想バネ定数制御手法を適用する。
【選択図】図5
特許請求の範囲
【請求項1】
ロボットの関節に取り付けられたモータに与える駆動電流を制御指令値に応じて増減させるとともに、前記モータの回転角に対応する位置現在値を出力するモータ駆動回路と、
少なくとも、前記位置現在値、前記ロボットの関節の位置目標値、仮想バネ定数、トルク目標値及び速度目標値を用いて前記制御指令値を生成する制御指令値生成部と、
前記制御指令値生成部の周期処理と同期した周期で、前記位置目標値及び前記仮想バネ定数を補正した補正後位置目標値及び補正後仮想バネ定数を前記制御指令値生成部に出力する補正処理部と、を有し、
前記補正処理部は、
前記モータに与えられる外乱のうち周波数が低い低周波側外乱成分に対しては前記位置目標値に対して補正を加える位置制御手法を適用し、周波数が高い高周波側外乱成分に対しては仮想バネ定数に補正を加える仮想バネ定数制御手法を適用した補正処理を行うロボット駆動装置。
続きを表示(約 1,700 文字)
【請求項2】
前記補正処理部は、
予め設定される値であって、前記モータに与えられる外乱により変動する外乱指標の目標値である外乱指標目標値を参照する参照処理と、
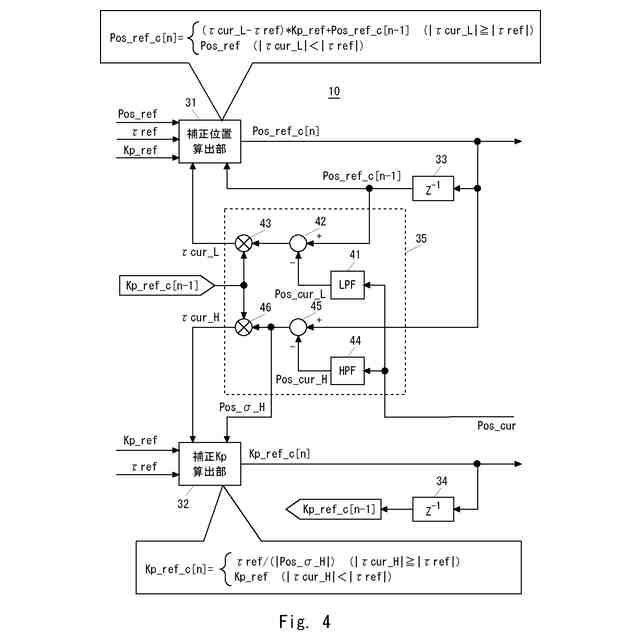
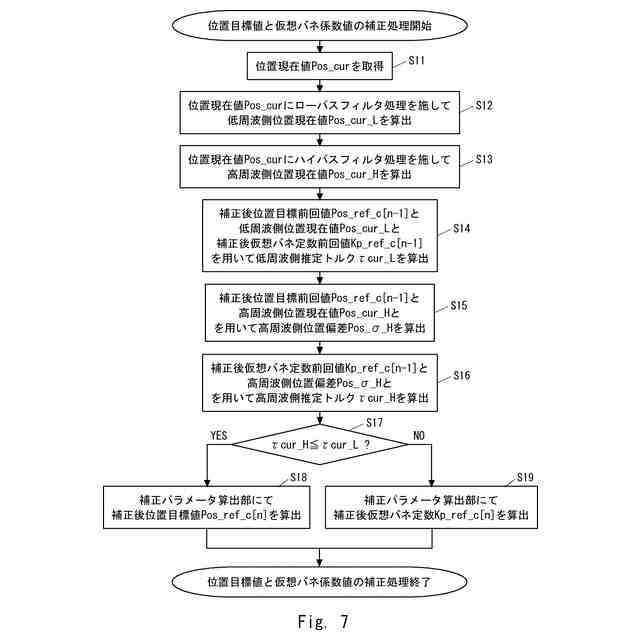
前記外乱指標の成分うち低周波側の周波数特性を有する前記低周波側外乱成分が前記外乱指標目標値以上であれば、予め設定された算出式に基づき算出される値を前記補正後位置目標値に設定し、前記低周波側外乱成分が前記外乱指標目標値よりも小さければ前記補正後位置目標値に予め設定される初期値を設定する第1の補正処理と、
前記外乱指標の成分うち高周波側の周波数特性を有する前記高周波側外乱成分が前記外乱指標目標値以上であれば、予め設定された算出式に基づき算出される値を前記補正後仮想バネ定数に設定し、前記低周波側外乱成分が前記外乱指標目標値よりも小さければ予め設定される初期値を前記補正後仮想バネ定数に設定する第2の補正処理と、を行う請求項1に記載のロボット駆動装置。
【請求項3】
前記補正処理部は、
前記第1の補正処理において補正された前記位置目標値を参照して前記第2の補正処理を行う請求項2に記載のロボット駆動装置。
【請求項4】
前記補正処理部は、
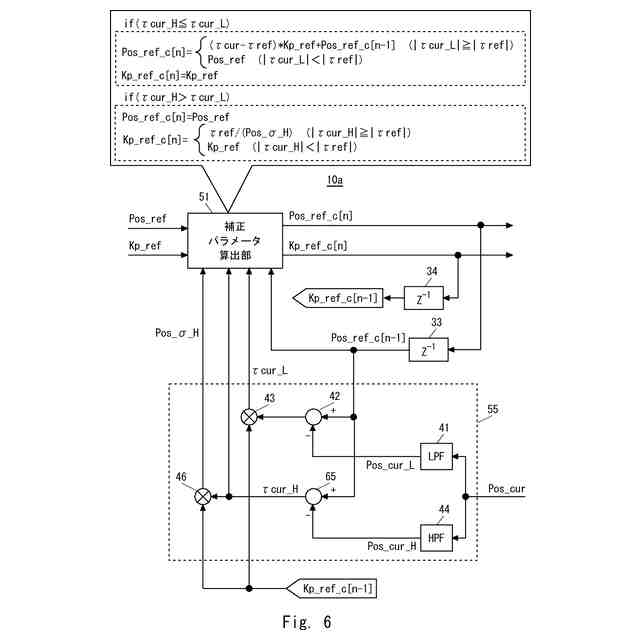
前記低周波側外乱成分が前記高周波側外乱成分以上であった場合、前記第1の補正処理に加えて、予め設定される初期値を前記補正後仮想バネ定数に設定する第1の補足補正処理を行い、
前記低周波側外乱成分が前記高周波側外乱成分よりも小さかった場合、前記第2の補正処理に加えて、予め設定される初期値を前記補正後位置目標値に設定する第2の補足補正処理を行う請求項2に記載のロボット駆動装置。
【請求項5】
前記外乱指標は、前記関節の位置偏差又は前記モータのトルク偏差であり、
前記補正処理部は、前記関節の位置偏差又は前記モータのトルク偏差を高周波側と低周波側の成分に分離するフィルタ処理部を有する請求項2に記載のロボット駆動装置。
【請求項6】
ロボットの関節に取り付けられたモータに与える駆動電流を制御指令値に応じて増減させるとともに、前記モータの回転角に対応する位置現在値を出力するモータ駆動回路と、
少なくとも、前記位置現在値、前記ロボットの関節の位置目標値、仮想バネ定数、トルク目標値及び速度目標値を用いて前記制御指令値を生成する制御指令値生成部と、
前記制御指令値生成部の周期処理と同期した周期で、前記位置目標値及び前記仮想バネ定数を補正した補正後位置目標値及び補正後仮想バネ定数を前記制御指令値生成部に出力する補正処理部と、を有するロボット駆動装置におけるロボット駆動方法であって、
前記補正処理部において、
前記モータに与えられる外乱のうち周波数が低い低周波側外乱成分に対しては前記位置目標値に対して補正を加える位置制御手法を適用し、周波数が高い高周波側外乱成分に対しては仮想バネ定数に補正を加える仮想バネ定数制御手法を適用した補正処理を行うロボット駆動方法。
【請求項7】
ロボットの関節に取り付けられたモータに与える駆動電流を制御指令値に応じて増減させるとともに、前記モータの回転角に対応する位置現在値を出力するモータ駆動回路と、
少なくとも、前記位置現在値、前記ロボットの関節の位置目標値、仮想バネ定数、トルク目標値及び速度目標値を用いて前記制御指令値を生成する制御指令値生成部と、
前記制御指令値生成部の周期処理と同期した周期で、前記位置目標値及び前記仮想バネ定数を補正した補正後位置目標値及び補正後仮想バネ定数を前記制御指令値生成部に出力する補正処理部と、を有し、前記補正処理部における演算処理を実行する演算部を有するロボット駆動装置において、前記演算部で実行されるロボット駆動プログラムであって、
前記モータに与えられる外乱のうち周波数が低い低周波側外乱成分に対しては前記位置目標値に対して補正を加える位置制御手法を適用し、周波数が高い高周波側外乱成分に対しては仮想バネ定数に補正を加える仮想バネ定数制御手法を適用した補正処理を行うロボット駆動プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明はロボット駆動装置、ロボット駆動方法及びロボット駆動プログラムに関し、例えば、仮想バネ定数と位置目標を用いたロボットの制御を行うロボット駆動装置、ロボット駆動方法及びロボット駆動プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
物体に接触させるアームを有するロボットでは、アームが物体に接触或いは衝突する際にトルクの入力変化量が大きく、かつ、変化の周波数が高いため制御が不安定になりやすい問題がある。そこで、このような不安定な制御を安定化させる技術が特許文献1に開示されている。
【0003】
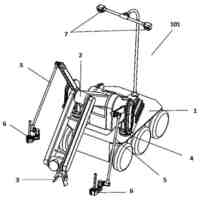
特許文献1に記載のロボットは、本体部と、床面上を移動する移動機構をそれぞれ含む、複数の移動機構部と、1又は複数の関節部をそれぞれ備え、前記本体部と各前記移動機構部との間をそれぞれ結合する、複数の脚部と、を備えたロボットであって、前記関節部は、インピーダンス制御により駆動される駆動軸を含む。
【先行技術文献】
【特許文献】
【0004】
特開2022-099034号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された位置制御においては、位置制御の精度を保証するために仮想バネ定数を比較的高めに設定する必要があり、現在位置の算出精度が低いと目標位置を変化させることが困難で振動しやすい問題がある。また、バネ定数制御においては、仮想バネ定数の取りうる値に下限が存在し、位置偏差を許容できなくなるといった課題がある。このように特許文献1に記載のロボットでは、位置制御及びトルク制御を安定化させるために取得する制御パラメータに利用の制限があるため、位置制御及びトルク制御を十分に安定化させることが困難である問題がある。
【0006】
本発明は、このような問題を解決するためになされたものであり、ロボットのアーム等の駆動部における位置制御をより安定化させることを目的とするものである。
【課題を解決するための手段】
【0007】
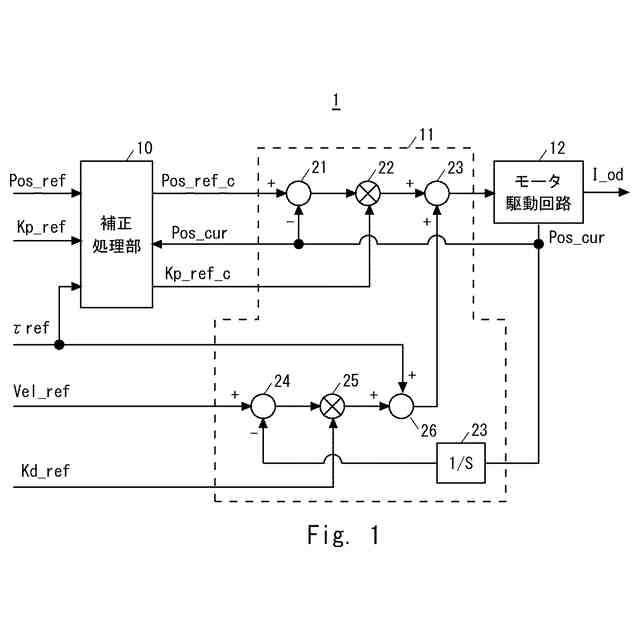
本発明にかかるロボット駆動装置の一態様は、ロボットの関節に取り付けられたモータに与える駆動電流を制御指令値に応じて増減させるとともに、前記モータの回転角に対応する位置現在値を出力するモータ駆動回路と、少なくとも、前記位置現在値、前記ロボットの関節の位置目標値、仮想バネ定数、トルク目標値及び速度目標値を用いて前記制御指令値を生成する制御指令値生成部と、前記制御指令値生成部の周期処理と同期した周期で、前記位置目標値及び前記仮想バネ定数を補正した補正後位置目標値及び補正後仮想バネ定数を前記制御指令値生成部に出力する補正処理部と、を有し、前記補正処理部は、前記モータに与えられる外乱のうち周波数が低い低周波側外乱成分に対しては前記位置目標値に対して補正を加える位置制御手法を適用し、周波数が高い高周波側外乱成分に対しては仮想バネ定数に補正を加える仮想バネ定数制御手法を適用した補正処理を行う。
【0008】
本発明にかかるロボット駆動方法の一態様は、ロボットの関節に取り付けられたモータに与える駆動電流を制御指令値に応じて増減させるとともに、前記モータの回転角に対応する位置現在値を出力するモータ駆動回路と、少なくとも、前記位置現在値、前記ロボットの関節の位置目標値、仮想バネ定数、トルク目標値及び速度目標値を用いて前記制御指令値を生成する制御指令値生成部と、前記制御指令値生成部の周期処理と同期した周期で、前記位置目標値及び前記仮想バネ定数を補正した補正後位置目標値及び補正後仮想バネ定数を前記制御指令値生成部に出力する補正処理部と、を有するロボット駆動装置におけるロボット駆動方法であって、前記補正処理部において、前記モータに与えられる外乱のうち周波数が低い低周波側外乱成分に対しては前記位置目標値に対して補正を加える位置制御手法を適用し、周波数が高い高周波側外乱成分に対しては仮想バネ定数に補正を加える仮想バネ定数制御手法を適用した補正処理を行う。
【0009】
本発明にかかるロボット駆動プログラムの一態様は、ロボットの関節に取り付けられたモータに与える駆動電流を制御指令値に応じて増減させるとともに、前記モータの回転角に対応する位置現在値を出力するモータ駆動回路と、少なくとも、前記位置現在値、前記ロボットの関節の位置目標値、仮想バネ定数、トルク目標値及び速度目標値を用いて前記制御指令値を生成する制御指令値生成部と、前記制御指令値生成部の周期処理と同期した周期で、前記位置目標値及び前記仮想バネ定数を補正した補正後位置目標値及び補正後仮想バネ定数を前記制御指令値生成部に出力する補正処理部と、を有し、前記補正処理部における演算処理を実行する演算部を有するロボット駆動装置において、前記モータに与えられる外乱のうち周波数が低い低周波側外乱成分に対しては前記位置目標値に対して補正を加える位置制御手法を適用し、周波数が高い高周波側外乱成分に対しては仮想バネ定数に補正を加える仮想バネ定数制御手法を適用した補正処理を行う。
【0010】
本発明にかかるロボット駆動装置、ロボット駆動方法及びロボット駆動プログラムでは、モータに与えられる外乱の周波数が低い場合には位置目標値に対して補正を加え、外乱の周波数が高い場合には仮想バネ定数に補正を加える。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
電動工具
6日前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社エビス
携帯付属物取付具
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ダイヘン
制御装置
3か月前
株式会社ダイヘン
搬送装置
4か月前
川崎重工業株式会社
ロボットアーム
6日前
日本車輌製造株式会社
締め付け工具
6日前
川崎重工業株式会社
ロボットアーム
6日前
SMC株式会社
グリッパ
3か月前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボットリスト
6日前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボット
2か月前
株式会社近藤製作所
産業用ロボットチャック
3か月前
CKD株式会社
吸着型搬送装置
20日前
学校法人立命館
ロボットハンド
2か月前
川崎重工業株式会社
ロボットシステム
6日前
株式会社安川電機
ロボット
23日前
株式会社安川電機
ロボット
23日前
株式会社安川電機
ロボット
23日前
トヨタ自動車株式会社
ロボットチャック
4か月前
川崎重工業株式会社
塗装ロボット
27日前
ジヤトコ株式会社
圧入装置
19日前
長堀工業株式会社
締結装置
1か月前
株式会社アイエイアイ
グリッパー
2か月前
白山工業株式会社
遠隔操作ロボット機構
4か月前
株式会社デンソーウェーブ
産業用ロボット
4か月前
株式会社不二越
垂直多関節ロボット
3か月前
中国電力株式会社
ボルト共回り防止用工具
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ