TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016897
公報種別
公開特許公報(A)
公開日
2025-02-05
出願番号
2023119692
出願日
2023-07-24
発明の名称
ロボットアーム及びロボットアームの駆動方法
出願人
オングリットホールディングス株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
5/00 20060101AFI20250129BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】照明柱や標識柱等の柱状の構造物に沿って移動するロボットアームについて、対象となる構造物に沿って、自由度が高く、かつ、安定した移動が可能であり、脱落等の不具合が生じにくいロボットアーム及びロボットアームの駆動方法を提供する。
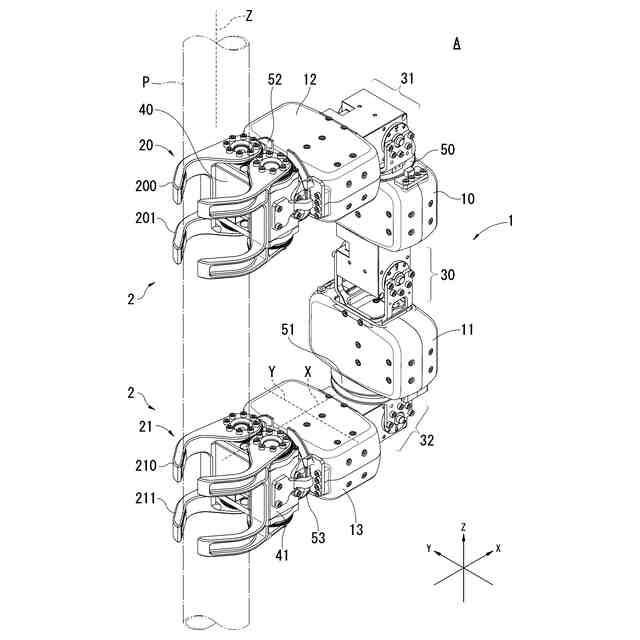
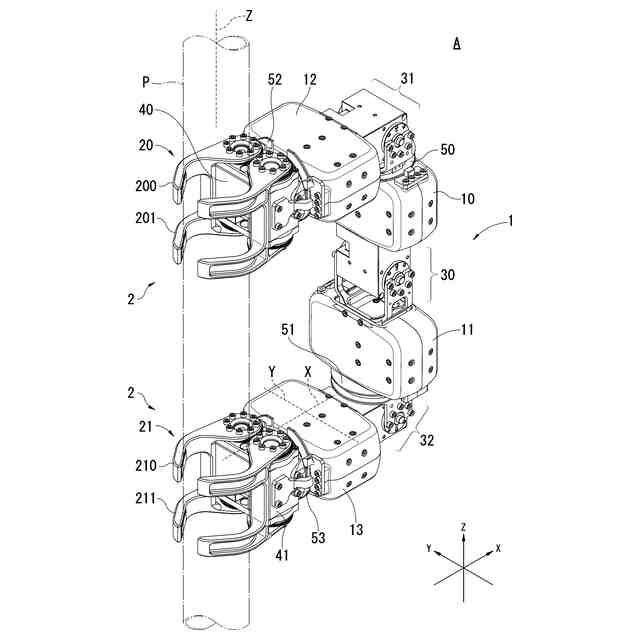
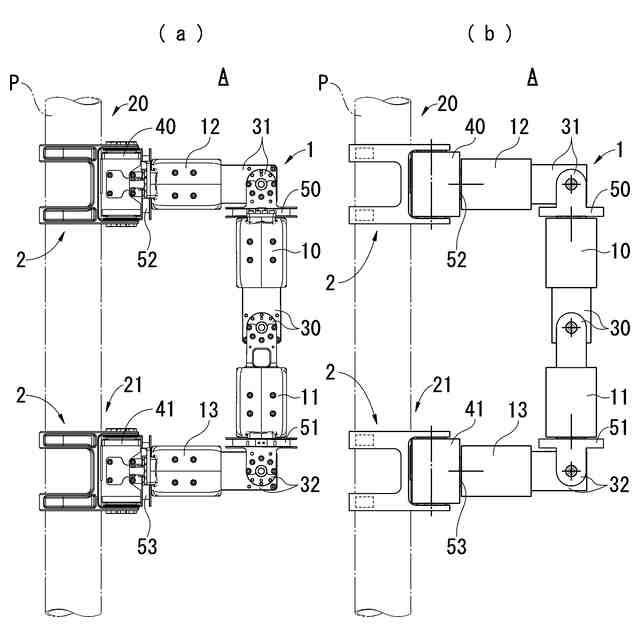
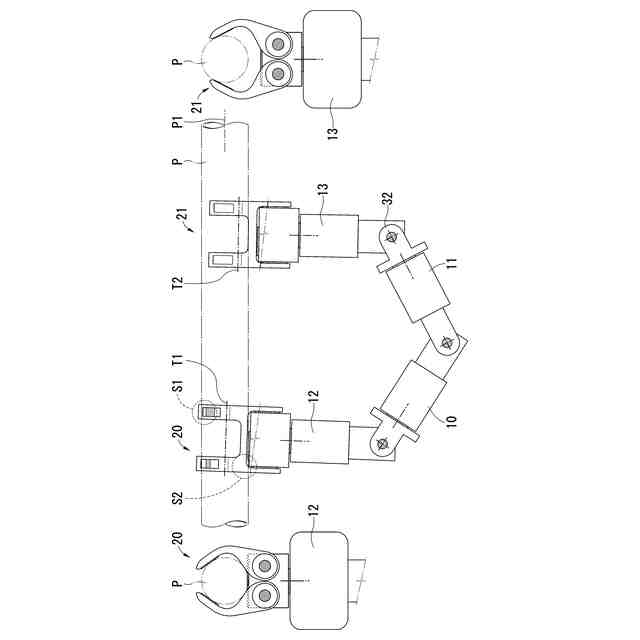
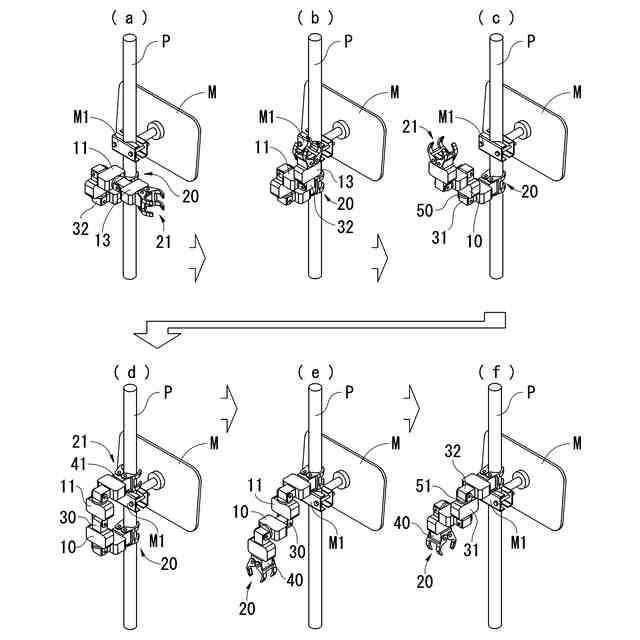
【解決手段】本発明を適用したロボットアームの一例であるロボットアームAは、本体部1と、ハンド部2を備えている。本体部1は、ボディ10、ボディ11、ボディ12及びボディ13を有している。また、本体部1は、ボディ屈伸ジョイント30、ボディ屈伸ジョイント31及びボディ屈伸ジョイント32を有している。また、本体部1は、ボディ回転ジョイント50及びボディ回転ジョイント51を有している。第1ハンド20と、第2ハンド20は、柱状構造物の外周面を把持する。
【選択図】図1
特許請求の範囲
【請求項1】
少なくとも一部が柱状に形成された所定の構造物に沿って移動するロボットアームであって、
第1のボディと、
前記第1のボディとなす角度を変える第1の屈伸接続部を介して、前記第1のボディの一端側に接続された第2のボディと、
前記第1のボディとなす角度を変える第2の屈伸接続部を介して、前記第1のボディの他端側に接続された第3のボディと、
前記第2のボディとなす角度を変える第3の屈伸接続部を介して、前記第2のボディの一端側に接続された第4のボディと、
前記第3のボディに支持され、前記所定の構造物の外周面を把持可能な第1のハンドと、
前記第1のハンドに取り付けられ、前記第1のハンドを開閉する第1のハンド開閉接続部と、
前記第1のハンド開閉接続部と、前記第3のボディの間に配置され、前記第3のボディに対して、前記第1のハンド及び前記第1のハンド開閉接続部を回転可能に接続する第1のハンド回転接続部と、
前記第4のボディに支持され、前記所定の構造物の外周面を把持可能な第2のハンドと、
前記第2のハンドに取り付けられ、前記第2のハンドを開閉する第2のハンド開閉接続部と、
前記第2のハンド開閉接続部と、前記第4のボディの間に配置され、前記第4のボディに対して、前記第2のハンド及び前記第2のハンド開閉接続部を回転可能に接続する第2のハンド回転接続部とを備える
ロボットアーム。
続きを表示(約 2,100 文字)
【請求項2】
前記第1のハンド及び前記第2のハンドは、前記所定の構造物の外周面を把持した際に、前記第1のハンド及び前記第2のハンドの内周面で略筒状の空間を形成して、その内周面の一部が、前記所定の構造物の外周面に当接し、
前記第1のハンドのみで前記所定の構造物の外周面を把持した際には、前記第1のハンドの内周面における略筒状の空間の軸心が、前記所定の構造物のうち、前記第1のハンドで把持した領域の軸心に対して傾いた位置関係になり、
前記第2のハンドのみで前記所定の構造物の外周面を把持した際には、前記第2のハンドの内周面における略筒状の空間の軸心が、前記所定の構造物のうち、前記第2のハンドで把持した領域の軸心に対して傾いた位置関係になる
請求項1に記載のロボットアーム。
【請求項3】
前記第1の屈伸接続部、前記第2の屈伸接続部、前記第3の屈伸接続部、前記第1のハンド開閉接続部、前記第1のハンド回転接続部、前記第2のハンド開閉接続部及び前記第2のハンド回転接続部の駆動を制御する駆動制御部を備える
請求項1または請求項2に記載のロボットアーム。
【請求項4】
前記第1の屈伸接続部、前記第2の屈伸接続部、前記第3の屈伸接続部、前記第1のハンド開閉接続部、前記第1のハンド回転接続部、前記第2のハンド開閉接続部及び前記第2のハンド回転接続部の7つの部材の駆動を介して、全体の姿勢を変える
請求項1または請求項2に記載のロボットアーム。
【請求項5】
前記第1のハンド開閉接続部による前記第1のハンドの開閉動作及び前記第2のハンド開閉接続部による前記第2のハンドの開閉動作と、前記第1のハンド回転接続部、前記第2のハンド回転接続部による回転動作と、前記第1の屈伸接続部、前記第2の屈伸接続部及び前記第3の屈伸接続部による角度調節を連動させて、前記所定の構造物の外周面の周方向に沿って移動可能に構成された
請求項1または請求項2に記載のロボットアーム。
【請求項6】
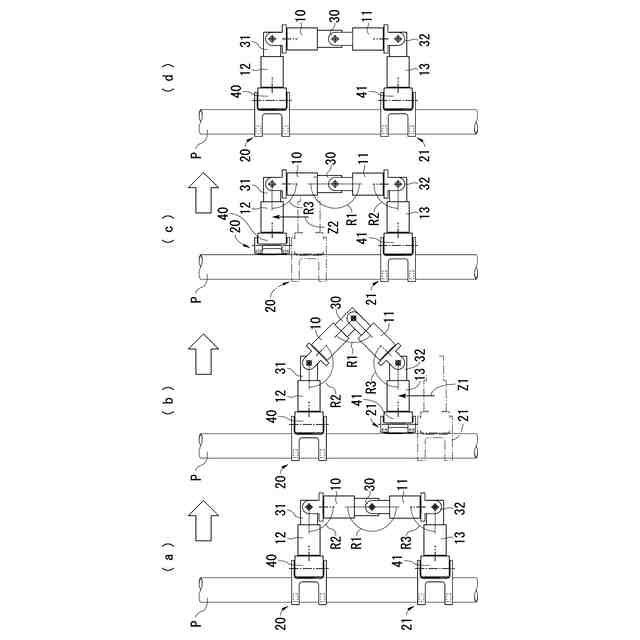
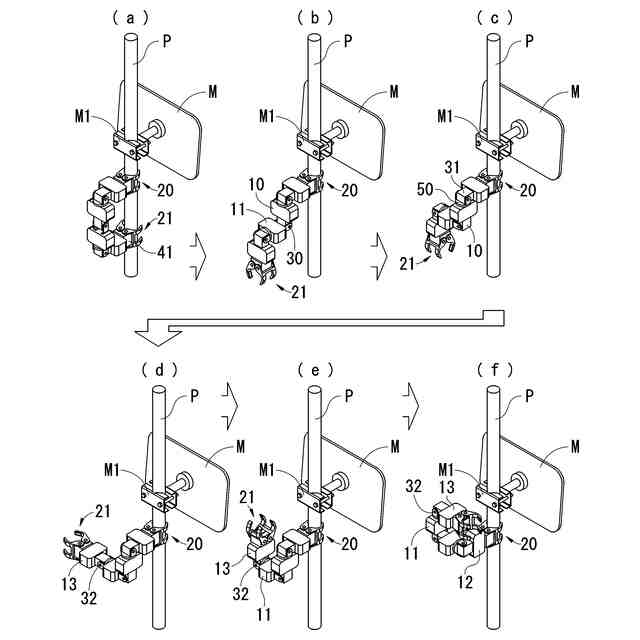
前記所定の構造物の軸心を基準とした半径方向、かつ、同一の方向に向けて、前記第1のハンドの基部から前記第2の屈伸接続部までの部位と、前記第2の屈伸部から前記第1の屈伸部までの部位が延び出した状態で、前記所定の構造物の外周面を把持した前記第1のハンドを、前記第2のハンドが越える動作を行い、
または、
前記所定の構造物の軸心を基準とした半径方向、かつ、同一の方向に向けて、前記第2のハンドの基部から前記第3の屈伸接続部までの部位と、前記第3の屈伸部から前記第1の屈伸部までの部位が延び出した状態で、前記所定の構造物の外周面を把持した前記第2のハンドを、前記第1のハンドが越える動作を行うように構成された
請求項1または請求項2に記載のロボットアーム。
【請求項7】
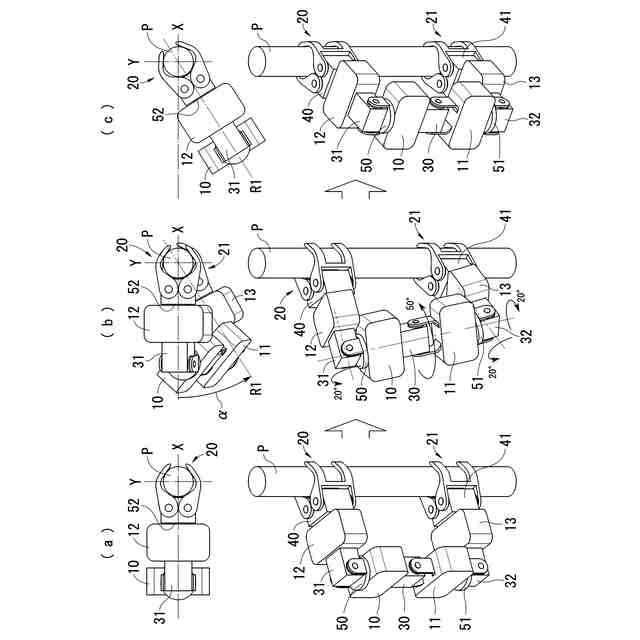
前記第1のボディと、前記第2の屈伸接続部との間に設けられ、前記第1のボディに対して、前記第3のボディ及び第2の屈伸接続部を回転可能に接続する第1のボディ回転接続部と、
前記第2のボディと、前記第3の屈伸接続部との間に設けられ、前記第2のボディに対して、前記第4のボディ及び第3の屈伸接続部を回転可能に接続する第2のボディ回転接続部とを備える
請求項1または請求項2に記載のロボットアーム。
【請求項8】
前記第1のハンド開閉接続部による前記第1のハンドの開閉動作及び前記第2のハンド開閉接続部による前記第2のハンドの開閉動作と、前記第1のハンド回転接続部、前記第1のボディ回転接続部、前記第2のハンド回転接続部及び前記第2のボディ回転接続部による回転動作を連動させて、前記所定の構造物の外周面の周方向に沿って移動可能に構成された
請求項7に記載のロボットアーム。
【請求項9】
前記所定の構造物の軸心を基準とした半径方向、かつ、同一の方向に向けて、前記第1のハンドの基部から前記第2の屈伸接続部までの部位と、前記第1の屈伸部から前記第3の屈伸部までの部位が延び出した状態で、前記所定の構造物の外周面を把持した前記第1のハンドを、前記第2のハンドが越える動作を行い、
または、
前記所定の構造物の軸心を基準とした半径方向、かつ、同一の方向に向けて、前記第2のハンドの基部から前記第3の屈伸接続部までの部位と、前記第1の屈伸部から前記第2の屈伸部までの部位が延び出した状態で、前記所定の構造物の外周面を把持した前記第2のハンドを、前記第1のハンドが越える動作を行うように構成された
請求項7に記載のロボットアーム。
【請求項10】
前記第1のハンド及び前記第2のハンドは、一対の第1の爪部と、前記一対の第1の爪部と略平行、かつ、前記一対の第1の爪部と間隔を設けて形成された、一対の第2の爪部を有する
請求項7に記載のロボットアーム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明はロボットアーム及びロボットアームの駆動方法に関する。詳しくは、照明柱や標識柱等の柱状の構造物に沿って移動するロボットアームについて、対象となる構造物に沿って、自由度が高く、かつ、安定した移動が可能であり、脱落等の不具合が生じにくいロボットアーム及びロボットアームの駆動方法に係るものである。
続きを表示(約 900 文字)
【背景技術】
【0002】
従前、道路において、照明柱や標識柱または情報装置柱等の柱状の構造物が設置されている。特に高速道路においては、これらの柱状の構造物が多数設置され、安全な車両の運行に利用されている。
【0003】
また、これらの照明柱等の構造物については、設置後、相当の年数を経ている物も多数存在し、その大部分が屋外に設置されていることから、気象等の外的要因による損傷や老朽化を調べるべく、定期的な点検を実施する必要がある。
【0004】
しかしながら、高速道路または一般道の照明柱や標識柱等は、道路上に間隔を空けて、膨大な数が設置されており、1つずつ点検する作業には多大な時間と労力を要する。
【0005】
そのため、照明柱や標識柱等の点検において、作業時間の短縮及び作業効率を向上すべく、検査装置を搭載した移動ロボットを活用した点検作業の開発が望まれている。
【0006】
また、従前、移動ロボットの一種として、対象物に対して昇降動作が可能な昇降ロボットが用いられている(例えば、特許文献1参照)。
【0007】
ここで、特許文献1に記載された昇降ロボットは、高層ビルの各階のベランダに設けられた手すりを把持しながら、各階を昇降するように構成されている。
【0008】
また、特許文献1に記載された昇降ロボットでは、アーム間関節軸及び先端側関節軸の各々を回動させ、複数のアームの姿勢を変化させながら、一方の把持部が把持した位置を、他方の把持部が超えて、昇降動作が行われる。
【先行技術文献】
【特許文献】
【0009】
第2899694号明細書
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、特許文献1に記載された昇降ロボットを、道路に設置された照明柱等に沿って移動する移動ロボットとして適用しようとすると、以下のような不具合が生じる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
電動工具
4日前
株式会社マキタ
電動ハンマ
3か月前
株式会社ダイヘン
制御装置
3か月前
株式会社ダイヘン
搬送装置
4か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社エビス
携帯付属物取付具
3か月前
川崎重工業株式会社
ロボット
1か月前
SMC株式会社
グリッパ
3か月前
川崎重工業株式会社
ロボットアーム
4日前
日本車輌製造株式会社
締め付け工具
4日前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットリスト
4日前
川崎重工業株式会社
ロボットアーム
4日前
株式会社マキタ
ハンマドリル
2か月前
CKD株式会社
吸着型搬送装置
18日前
川崎重工業株式会社
ロボットシステム
4日前
学校法人立命館
ロボットハンド
2か月前
株式会社近藤製作所
産業用ロボットチャック
3か月前
川崎重工業株式会社
塗装ロボット
25日前
ジヤトコ株式会社
圧入装置
17日前
白山工業株式会社
遠隔操作ロボット機構
4か月前
長堀工業株式会社
締結装置
1か月前
トヨタ自動車株式会社
ロボットチャック
3か月前
株式会社安川電機
ロボット
21日前
株式会社安川電機
ロボット
21日前
株式会社安川電機
ロボット
21日前
株式会社アイエイアイ
グリッパー
2か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社デンソーウェーブ
産業用ロボット
3か月前
株式会社アマダ
磁気吸着装置
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ