TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016638
公報種別
公開特許公報(A)
公開日
2025-02-04
出願番号
2024191279,2022115165
出願日
2024-10-31,2018-02-15
発明の名称
装置及び方法
出願人
パーシモン テクノロジーズ コーポレイション
,
PERSIMMON TECHNOLOGIES, CORP.
代理人
個人
主分類
B25J
9/10 20060101AFI20250128BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数のエンドエフェクタを備えた材料取り扱いロボットを提供する
【解決手段】好適な実施形態の一例の装置は、複数のモータ及び複数の同軸駆動シャフトを有するロボット駆動部と、ロボット駆動部に連結されるロボットアームとを備える。ロボットアームは、いずれかの同軸駆動シャフトに連結される第1及び第2の上腕と、第1の上腕に連結される第1の前腕セットと、第2の上腕に連結される第2の前腕セットと、それぞれいずれかの前腕に接続される複数のエンドエフェクタとを有する。前記装置はまた、第1の上腕に配置され、第1の前腕セットの前腕を回転させる第1のモータと、第2の上腕に配置され、第2の前腕セットの前腕を回転させる第2のモータとを備える
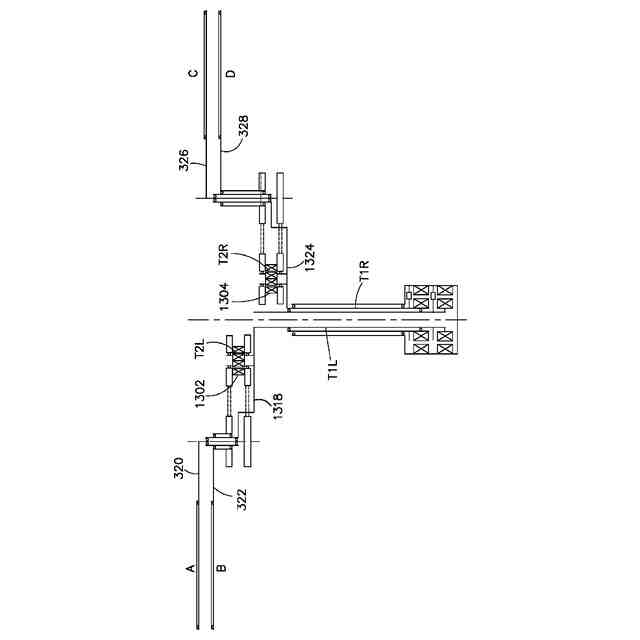
【選択図】図13B
特許請求の範囲
【請求項1】
複数のモータ及び複数の同軸駆動シャフトを有するロボット駆動部と;
前記ロボット駆動部に連結されるロボットアームであって、第1の上腕と、第2の上腕と、前記第1の上腕に連結される第1の前腕セットと、前記第2の上腕に連結される第2の前腕セットと、それぞれいずれかの前腕に接続される複数のエンドエフェクタとを有し、前記第1及び第2の上腕は、それぞれ前記複数の同軸駆動シャフトのうちの第1の同軸駆動シャフト及び第2の同軸駆動シャフトのいずれかに連結される、ロボットアームと;
前記第1の上腕に配置される第1のモータであって、前記第1の前腕セットに含まれる第1の前腕を、前記第1の上腕に対して回転させるように構成される第1のモータと;
前記第2の上腕に配置される第2のモータであって、前記第2の前腕セットに含まれる第1の前腕を、前記第2の上腕に対して回転させるように構成される第2のモータと;
を備える、装置。
続きを表示(約 1,000 文字)
【請求項2】
前記第1の上腕に配置される第3のモータであって、前記第1の前腕セットに含まれる第2の前腕を、前記第1の上腕に対して回転させるように構成される第3のモータを更に備える、請求項1に記載の装置。
【請求項3】
前記第2の上腕に配置される第4のモータであって、前記第2の前腕セットに含まれる第2の前腕を、前記第2の上腕に対して回転させるように構成される第4のモータを更に備える、請求項2に記載の装置。
【請求項4】
前記第1の上腕に設けられ、前記第1のモータを前記第1の上腕の前記第1の前腕に接続する第1の駆動ベルト機構と、
前記第1の上腕に設けられ、前記第1のモータを前記第1の上腕の前記第2の前腕に接続する第2の駆動ベルト機構と、
を更に備える、請求項2に記載の装置。
【請求項5】
前記第1の駆動ベルト機構が、前記第1の上腕の前記第1の前腕に結合される直線状ベルト駆動部を有し、
前記第2の駆動ベルト機構が、前記第1の上腕の前記第2の前腕に結合される交差状ベルト駆動部を有する、
請求項4に記載の装置。
【請求項6】
前記第1の駆動ベルト機構及び前記第2の駆動ベルト機構は、各々、少なくとも1組のプーリと、前記1組のプーリの間の駆動ベルトとを備え、前記1組のプーリのうちの少なくとも1つは非円形プーリである、請求項5に記載の装置。
【請求項7】
前記第1の上腕に設けられ、前記第1のモータを前記第1の上腕の前記第1の前腕に接続する第1の駆動ベルト機構を備える、請求項1に記載の装置。
【請求項8】
前記第1の上腕に設けられ、前記第1のモータを、前記第1の上腕の前記第1の前腕セットの第2の前腕に接続する第2の駆動ベルト機構と、
を更に備える、請求項7に記載の装置。
【請求項9】
前記第1の前腕セットは、共通の回転軸で前記第1の上腕に連結される、請求項1に記載の装置。
【請求項10】
前記ロボット駆動部に接続される制御装置を更に備え、前記制御装置は、少なくとも1つのプロセッサと、前記モータを制御するためのコンピュータ命令を格納する少なくとも1つのメモリとを有する、請求項1に記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
例示的で非限定的な実施形態は、概して材料取り扱いロボットに関し、より詳細には、複数のエンドエフェクタを有する材料取り扱いロボットに関する。
続きを表示(約 5,500 文字)
【従来技術の簡単な説明】
【0002】
例えば、半導体ウェハ処理システムにおける用途のためなどの、材料取り扱いロボットが知られている。いくつかの例は、以下の米国特許および特許公報(それらの全体が参照により本明細書に組み込まれる)すなわち、非円形プーリがどのように計算され得るかを開示する米国特許第9,149,936号明細書、米国特許出願公開第2016/0167229号明細書、および米国特許出願公開第2017/0028546号明細書に見出され得る。
【摘要】
【0003】
以下の摘要は、単に例示的なものであるように意図されている。摘要は、特許請求の範囲を限定するように意図されていない。
【0004】
本願に開示される装置の一例は、
複数のモータ及び複数の同軸駆動シャフトを有するロボット駆動部と;
前記ロボット駆動部に連結されるロボットアームであって、第1の上腕と、第2の上腕と、前記第1の上腕に連結される第1の前腕セットと、前記第2の上腕に連結される第2の前腕セットと、それぞれいずれかの前腕に接続される複数のエンドエフェクタとを有し、前記第1及び第2の上腕は、それぞれ前記複数の同軸駆動シャフトのうちの第1の同軸駆動シャフト及び第2の同軸駆動シャフトのいずれかに連結される、ロボットアームと;
前記第1の上腕に配置される第1のモータであって、前記第1の前腕セットに含まれる第1の前腕を、前記第1の上腕に対して回転させるように構成される第1のモータと;
前記第2の上腕に配置される第2のモータであって、前記第2の前腕セットに含まれる第1の前腕を、前記第2の上腕に対して回転させるように構成される第2のモータと;
を備える。
【0005】
本願に開示される方法の一例は、
ロボット駆動部の第1の同軸駆動シャフトに第1の上腕を連結することと;
前記ロボット駆動部の第2の同軸駆動シャフトに第2の上腕を連結することと;
前記第1の上腕に第1の前腕セットを連結することと;
前記第1の前腕セットに含まれる第1の前腕を、前記第1の上腕に対して回転させるように構成される第1のモータであって、前記第1の上腕に配置される第1のモータを、前記第1の前腕セットの前記第1の前腕に接続することと;
前記第2の上腕に第2の前腕セットを連結することと;
前記第2の前腕セットに含まれる第1の前腕を、前記第2の上腕に対して回転させるように構成される第2のモータであって、前記第2の上腕に配置される第2のモータを、前記第2の前腕セットの前記第1の前腕に接続することと;
複数のエンドエフェクタをそれぞれ前腕に連結することと;
を含む。
【0006】
本願に開示される方法の一例は、
ロボットアームの第1の上腕を第1の軸の周りに回転させるべく、ロボット駆動部の第1の同軸駆動シャフトを前記第1の軸の周りに第1の方向に回転させることと;
前記第1の同軸駆動シャフトが回転している間に、前記第1の上腕に配置されている第1のモータを作動させ、前記第1の上腕上で第1の前腕を回転させることと;
ロボットアームの第2の上腕を前記第1の軸の周りに回転させるべく、前記ロボット駆動部の第2の同軸駆動シャフトを前記第1の軸の周りに第2の方向に回転させることと;
前記第2の同軸駆動シャフトが回転している間に、前記第2の上腕に配置されている第2のモータを作動させ、前記第2の上腕上で第2の前腕を回転させることと;
を含む、方法。
【0007】
本願に開示される装置の一例は、複数のモータと、前記モータに接続された複数の同軸駆動シャフトとを備えるロボット駆動部と、前記ロボット駆動部に接続されたロボットアームと、を備える。前記ロボットアームは、2つの上腕と、前記上腕の第1の上腕に接続された第1の組の前腕と、前記上腕の第2の上腕に接続された第2の組の前腕と、前記前腕のそれぞれに接続された複数のエンドエフェクタとを備え、前記第1の上腕および前記第2の上腕は、前記同軸駆動シャフトのそれぞれの第1の同軸駆動シャフトおよび第2の同軸駆動シャフトに接続され、前記第1の組の前腕は、第1の上腕上に装着されるとともに、それぞれの第1の駆動ベルト組立体および第2の駆動ベルト組立体によって前記同軸駆動シャフトの第3の同軸駆動シャフトに接続され、前記第2の組の前腕は、前記第2の上腕に装着されるとともに、それぞれの第3の駆動ベルト組立体および第4の駆動ベルト組立体によって前記同軸駆動シャフトの第4の同軸駆動シャフトに接続される。
別の態様によれば、例示的な方法は、ロボット駆動部の第1の同軸駆動シャフトに第1の上腕を接続することと、前記ロボット駆動部の第2の同軸駆動シャフトに第2の上腕を接続することと、前記第1の上腕に第1の組の前腕を接続することであって、第1の駆動ベルト機構が、前記ロボット駆動部の第3の同軸駆動シャフトに前記第1の組の前腕のうちの前記前腕の第1の前腕を接続し、かつ第2の駆動ベルト機構が、前記ロボット駆動部の第3の同軸駆動シャフトに前記第1の組の前腕のうちの前記前腕の第2の前腕を接続する、前記接続することと、前記第2の上腕に第2の組の前腕を接続することであって、第3の駆動ベルト機構が、前記ロボット駆動部の第4の同軸駆動シャフトに前記第2の組の前腕のうちの前記前腕の第1の前腕を接続し、かつ第4の駆動ベルト機構が、前記ロボット駆動部の前記第4の同軸駆動シャフトに前記第2の組の前腕のうちの前記前腕の第2の前腕を接続する、前記接続することと、前記前腕にそれぞれのエンドエフェクタを接続することと、を含む。
一態様によれば、例示的な方法は、第1の軸を中心にロボット駆動部の第1の同軸駆動シャフトを第1の方向に回転させて、前記第1の軸を中心にロボットアームの第1の上腕を回転させることと、前記第1の同軸駆動シャフトを回転させている間に、前記第1の軸を中心にロボット駆動部の第2の同軸駆動シャフトを回転させて、第1の駆動ベルト機構および第2の駆動ベルト機構を移動させ、それによって、前記第1の上腕上の第1の前腕および第2の前腕を回転させることと、前記第1の軸を中心に前記ロボット駆動部の第3の同軸駆動シャフトを第2の方向に回転させて、前記第1の軸を中心にロボットアームの第2の上腕を回転させることと、前記第1の軸を中心に前記ロボット駆動部の第4の同軸駆動シャフトを回転させて、第3の駆動ベルト機構および第4の駆動ベルト機構を移動させ、それによって、前記第2の上腕上の第3の前腕および第4の前腕を回転させることと、を含む。
別の態様によれば、例示的な方法は、第1の軸を中心にロボット駆動部の第1の同軸駆動シャフトを第1の方向に回転させて、前記第1の軸を中心にロボットアームの少なくとも1つの上腕を回転させることと、前記第1の同軸駆動シャフトを回転させている間に、前記第1の軸を中心に前記ロボット駆動部の第2の同軸駆動シャフトを回転させて、少なくとも第1の駆動ベルト機構を移動させ、前記少なくとも1つの上腕上の第1の前腕を回転させるとともに、前記第1の前腕上の第1のエンドエフェクタを後退位置から延出位置に向けて延出させることと、前記第1の軸を中心に前記ロボット駆動部の第3の同軸駆動シャフトを第2の方向に回転させて、少なくとも第2の駆動ベルト機構を移動させ、前記少なくとも1つの上腕上の第2の前腕を回転させるとともに、前記第1のエンドエフェクタを前記後退位置から前記延出位置に向けて移動させる間に前記第2の前腕上の第2のエンドエフェクタを後退位置に保持することと、を含んでもよい。
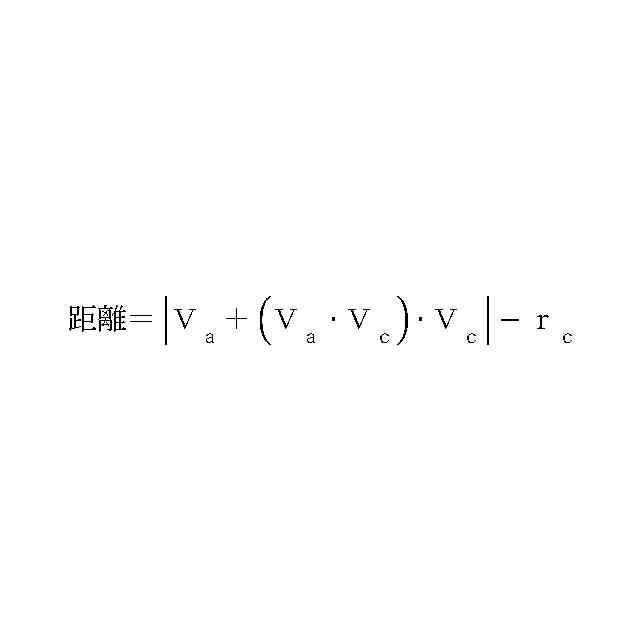
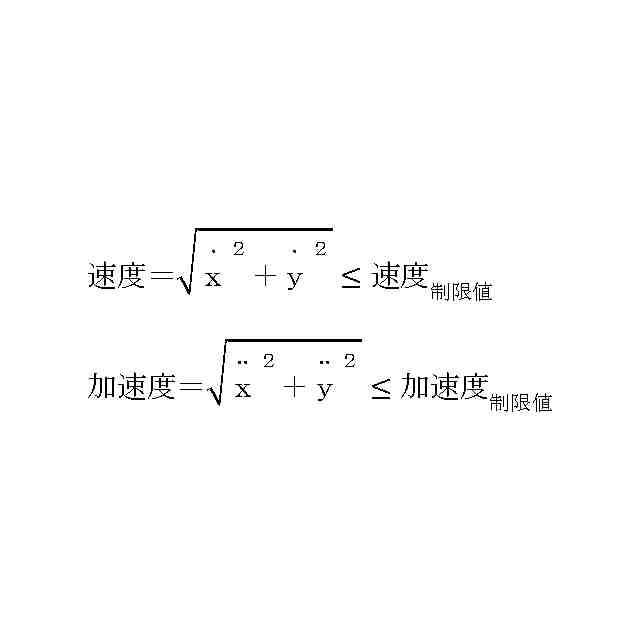
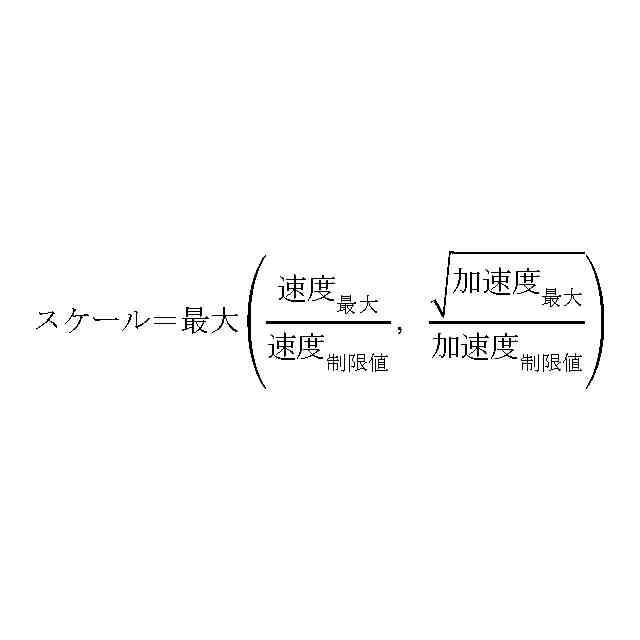
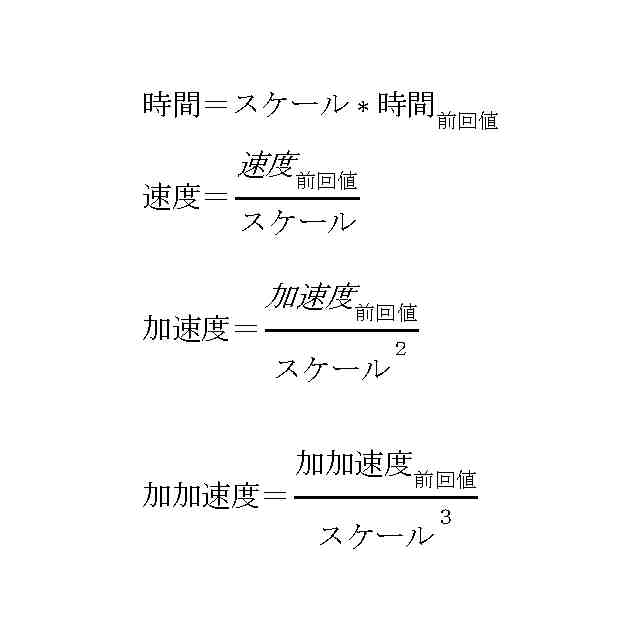
【0008】
別の態様によれば、例示的な方法は、基準点がロボットアーム上のエンドエフェクタ上にある、前記基準点の開始位置から前記基準点の終了位置までの前記基準点の所望の経路に基づいて、前記開始位置に対応するとともに前記終了位置に対応する挟角を決定することであって、前記ロボットアームは、前記ロボットアームを移動させるためのモータを有するロボット駆動部に接続される、決定することと、少なくとも部分的に前記挟角に基づいて前記エンドエフェクタ上の前記基準点の動径座標の軌道を計算することと、前記エンドエフェクタ上の前記基準点が前記開始位置と前記終了位置との間の前記所望の経路をたどるように、前記計算された動径座標に基づいて、前記エンドエフェクタ上の前記基準点の対応する角度座標を計算することと、逆運動学の修正定式化を使用して、前記軌道の前記挟角ならびに前記エンドエフェクタの対応する角速度および加速度で補完された、前記エンドエフェクタ上の前記基準点の前記動径座標および前記角度座標を所望の関節位置、速度、および加速度に変換して、前記ロボットアームの運動設定値を形成することと、前記運動設定点に基づいて前記ロボットアームを移動させるように前記ロボット駆動部の前記モータを制御することと、を含む。
【0009】
別の態様によれば、例示的な方法は、ロボットアームのエンドエフェクタ上の基準点の開始位置と終了位置との間の前記基準点の経路を制御装置によって決定することであって、前記ロボットアームは、前記ロボットアームを移動させるためのモータを有するロボット駆動部に接続され、かつ前記制御装置は、少なくとも1つのプロセッサと、コンピュータコードを有する少なくとも1つの非一時的メモリとを備える、前記決定することと、前記制御装置が、複数の異なる移動制御モードから移動制御モードを選択することであって、前記異なる移動制御モードは、前記開始位置と前記終了位置との間の前記経路が前記ロボットアームの運動学的特異点と交差すると判定し、前記経路を用いて前記ロボットアームの動きを実行しないことと、前記開始位置と前記終了位置との間の前記経路が前記ロボットアームの前記運動学的特異点から所定の閾値距離の外側を通過すると判定し、デカルト空間軌道生成スキームを使用して前記ロボットアームを移動させることと、前記開始位置と前記終了位置との間の前記経路が前記ロボットアームの前記運動学的特異点から前記所定の閾値距離以内を通過すると判定し、前記開始位置に対応するとともに前記終了位置に対応する挟角を決定し、関節座標として前記開始位置および前記終了位置を計算し、少なくとも部分的に前記挟角に基づいて動径座標で前記開始位置から前記終了位置までの軌道を計算し、前記基準点が前記開始位置と前記終了位置との間のデカルト空間内の前記経路をたどるように前記基準点の対応する角度座標を計算することと、を含む、前記選択することと、前記制御装置が、前記選択された制御モードに基づいて前記ロボットアームの前記モータの動きを制御することと、を含む。
【0010】
別の態様によれば、例示的な実施形態は、少なくとも1つのプロセッサと、コンピュータプログラムコードを含む少なくとも1つの非一時的メモリとを備える装置であって、前記少なくとも1つのメモリおよび前記コンピュータプログラムコードは、前記少なくとも1つのプロセッサを用いて、前記装置に、前記少なくとも1つのメモリおよび前記コンピュータプログラムコードによってロボットアームのエンドエフェクタ上の基準点の開始位置と前記基準点の終了位置との間の前記基準点の経路を軌道として決定することであって、前記ロボットアームは、前記ロボットアームを移動させるためのモータを有するロボット駆動部に接続される、前記決定することと、前記少なくとも1つのプロセッサおよび前記コンピュータプログラムコードによって複数の異なる移動制御モードから移動制御モードを選択することであって、前記複数の異なる移動制御モードは、前記開始位置と前記終了位置との間の前記経路が前記ロボットアームの運動学的特異点と交差すると判定し、前記経路を用いて前記ロボットアームの動きを実行しないことと、前記開始位置と前記終了位置との間の前記経路が前記ロボットアームの前記運動学的特異点から所定の閾値距離の外側を通過すると判定し、デカルト軌道生成スキームを使用して前記ロボットアームを移動させることと、前記開始位置と終前記了位置との間の前記経路が前記ロボットアームの前記運動学的特異点から前記所定の閾値距離以内を通過すると判定し、前記開始位置に対応するとともに前記終了位置に対応する挟角を決定し、関節座標として前記開始位置および前記終了位置を計算し、少なくとも部分的に前記挟角に基づいて動径座標で前記基準点の前記軌道を計算し、前記基準点が前記動きの前記開始位置と前記終了位置との間のデカルト空間内の前記経路をたどるように前記エンドエフェクタ上の前記基準点の対応する角度座標を計算することと、を含む、前記選択することと、を行わせるように構成される、前記装置において提供されてもよい。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
10日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
電動工具
18日前
株式会社マキタ
電動工具
3日前
株式会社ダイヘン
制御装置
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社マキタ
電動ハンマ
4か月前
株式会社エビス
携帯付属物取付具
3か月前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットリスト
18日前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボットアーム
18日前
川崎重工業株式会社
ロボットアーム
18日前
日本車輌製造株式会社
締め付け工具
18日前
SMC株式会社
グリッパ
4か月前
川崎重工業株式会社
ロボット
2か月前
学校法人立命館
ロボットハンド
3か月前
川崎重工業株式会社
ロボットシステム
18日前
CKD株式会社
吸着型搬送装置
1か月前
株式会社近藤製作所
産業用ロボットチャック
4か月前
日本信号株式会社
作業機制御システム
3日前
株式会社京阪エンジニアリング
脱着装置
4日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
長堀工業株式会社
締結装置
1か月前
株式会社アイエイアイ
グリッパー
2か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ