TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016163
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023119264
出願日
2023-07-21
発明の名称
移動体システム、自律移動方法、自律移動プログラム
出願人
ブルーイノベーション株式会社
代理人
弁理士法人みなとみらい特許事務所
主分類
G05D
1/43 20240101AFI20250124BHJP(制御;調整)
要約
【課題】 本発明は、SLAM処理による移動体の自律移動の技術に関する。
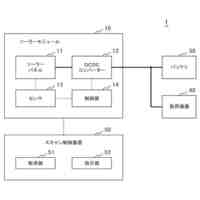
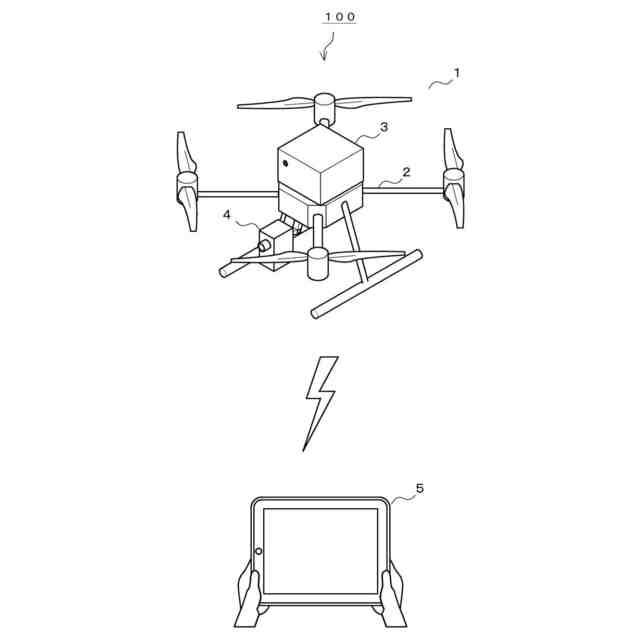
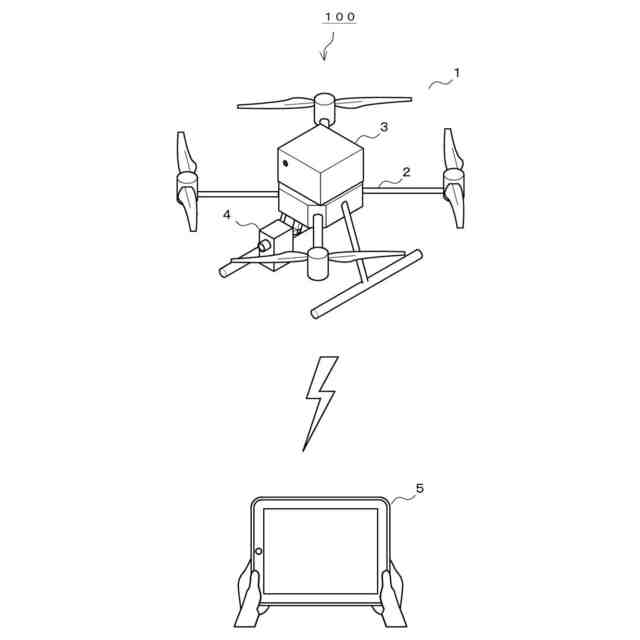
【解決手段】 SLAM処理によって自律移動を行う為の移動体システム100である。
移動体システム100は、範囲決定部と取得部とマッピング処理部を備える。
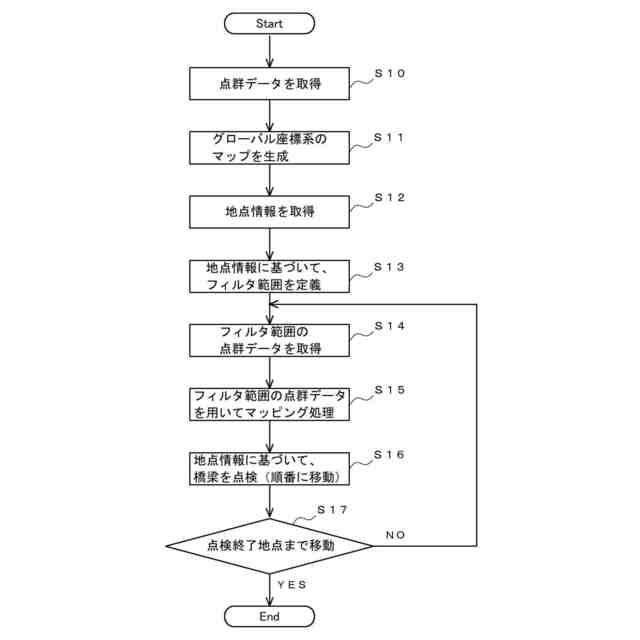
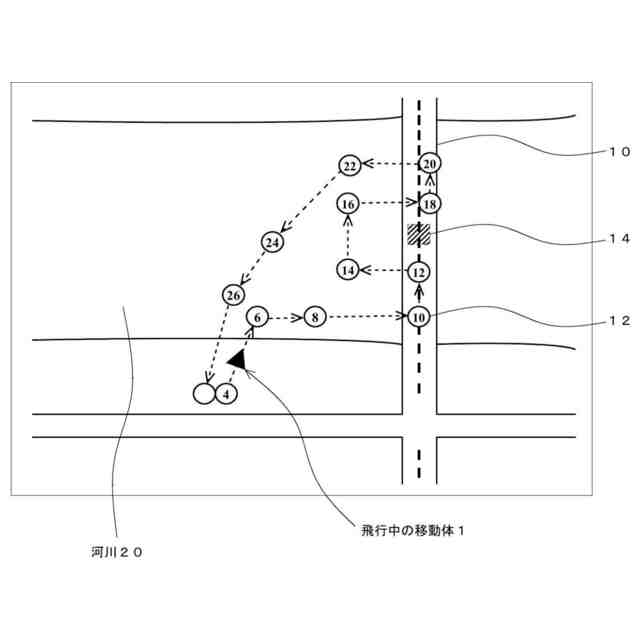
範囲決定部は、移動体の移動経路となる複数の地点について、各地点の座標を含んだ地点情報を取得し、地点情報に基づいて、それぞれの軸方向において最大の座標値及び最小の座標値を決定し、決定した前記座標値からフィルタ範囲を定義する。
取得部は、移動体の移動中における点群データを取得し、マッピング処理部は、フィルタ範囲によるフィルタリング後の点群データを用いて、マッピング処理を行う。
【選択図】図1
特許請求の範囲
【請求項1】
SLAM処理によって自律移動を行う為の移動体システムであって、
移動体システムは、範囲決定部と、取得部と、マッピング処理部と、を備え、
前記範囲決定部は、移動体の移動経路となる複数の地点について、各地点の座標を含んだ地点情報を取得し、前記地点情報に基づいて、それぞれの軸方向において最大の座標値及び最小の座標値を決定し、決定した前記座標値からフィルタ範囲を定義し、
前記取得部は、前記移動体の移動中における点群データを取得し、
前記マッピング処理部は、前記フィルタ範囲によるフィルタリング後の前記点群データを用いて、マッピング処理を行う、
移動体システム。
続きを表示(約 1,400 文字)
【請求項2】
前記マッピング処理部は、前記点群データを所定の種別に分類処理し、前記分類処理の結果に基づいて前記点群データを除外して前記マッピング処理を行う、
請求項1に記載の移動体システム。
【請求項3】
前記移動体システムは、更に計測部と推定処理部を備え、
前記計測部は、前記移動体の移動中における気圧を含んだ環境情報を経時的に計測し、
前記推定処理部は、前記環境情報を利用して前記移動体の自己位置を推定処理する、
請求項1に記載の移動体システム。
【請求項4】
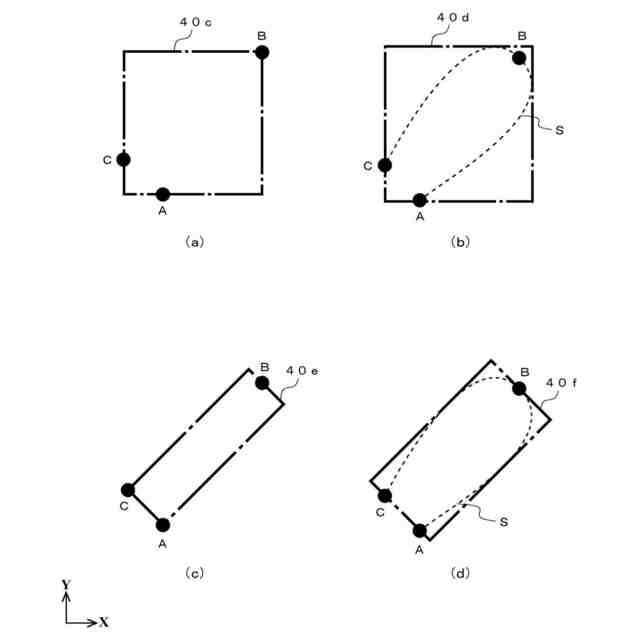
前記範囲決定部は、前記地点情報に基づいて、前記移動経路上の複数地点を通る曲線を作成し、
前記曲線上の座標から、前記最大の座標値及び前記最小の座標値を決定する、
請求項1に記載の移動体システム。
【請求項5】
前記地点情報は、前記移動経路の開始点、終了点及び中継点の座標を含み、
前記範囲決定部は、前記地点情報に含まれた複数地点の座標を通る曲線を作成し、前記曲線の導関数から平方根を算出し、
前記平方根によって特定される前記曲線上の座標値及び、前記地点情報に含まれた座標値から、前記最大の座標値及び最小の座標値を決定する、
請求項4に記載の移動体システム。
【請求項6】
前記範囲決定部は、前記最大の座標値及び最小の座標値を決定し、これら座標値から定義される領域にマージンを付加して、前記フィルタ範囲を定義する、
請求項1に記載の移動体システム。
【請求項7】
前記範囲決定部は、3軸方向における前記最大の座標値及び最小の座標値から、3次元の前記フィルタ範囲を定義する、
請求項1に記載の移動体システム。
【請求項8】
前記地点情報は、自律移動の開始地点を含み、
前記取得部は、GNSS座標を取得し、
前記マッピング処理部は、前記点群データの座標値を前記GNSS座標に基づいて、前記移動体を基準としたローカル座標系からグローバル座標系に変換処理し、前記変換処理の結果に基づいてマッピング処理を行う、
請求項1に記載の移動体システム。
【請求項9】
前記地点情報は、自律移動の開始地点を含み、
前記取得部は、GNSS座標を取得し、
前記マッピング処理部は、マッピング処理後における前記点群データの座標値を前記GNSS座標に基づいて、前記移動体を基準としたローカル座標系からグローバル座標系に変換処理する、
請求項1に記載の移動体システム。
【請求項10】
SLAM処理によって自律移動を行う移動体の自律移動プログラムであって、
コンピュータを、範囲決定部と、取得部と、マッピング処理部と、として機能させ、
前記範囲決定部は、前記移動体の移動経路となる複数の地点について、各地点の座標を含んだ地点情報を取得し、前記地点情報に基づいて、それぞれの軸方向において最大の座標値及び最小の座標値を決定し、決定した前記座標点からフィルタ範囲を定義し、
前記取得部は、前記移動体の移動中における点群データを取得し、
前記マッピング処理部は、所定の条件によるフィルタリング後の前記点群データを用いて、前記フィルタ範囲をマッピング処理する、
自律移動プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、SLAM処理による移動体の自律移動の技術に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
近年、ロボットやドローンなどの移動体は、災害調査や各種点検などの用途に利用されている。これらの用途に移動体を利用するためには、当該移動体の自己位置を推定する技術が必要不可欠である。
【0003】
例えば特許文献1には、自己位置を高精度に推定できる移動体が開示されている。本移動体は、撮像部、マスク生成部、特徴量抽出部、自己位置推定部、などを備え、周囲の画像において自己位置を特定するのに有用でない範囲である非特徴領域にマスクを生成する技術が開示されている。
【0004】
この移動体によれば、異なる位置であるにも関わらず周囲に類似した特徴量が多く存在することにより、同一の位置と誤検出され易い環境であっても、区別して高精度に自己位置を推定することができる。
【先行技術文献】
【特許文献】
【0005】
特許第7151725号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ドローン等の移動体において自己位置推定を行う手法として、点群データを利用したSLAM処理(自己位置推定と環境MAP作成を同時に行う技術)が知られている。
【0007】
一般的に、移動体において高精度なSLAM処理を行うためには、高性能なマイコン(大きくて重いマイコン)等が必要となる。しかし、大きくて重いマイコンを移動体に搭載すると、飛行距離やバッテリー容量に影響がある。
【0008】
また、特許文献1の技術を利用して画像における非特徴領域にマスクを生成することで誤検出を抑制することができる一方、点群データを利用したSLAM処理を簡易化することはできない。
【0009】
本発明は、上記従来技術の課題に鑑みて行われたものであって、その目的は、SLAM処理による移動体システムの新規な技術を提供することにある。
【0010】
上記課題を解決するために、本発明は、SLAM処理によって自律移動を行う為の移動体システムであって、
移動体システムは、範囲決定部と、取得部と、マッピング処理部と、を備え、
前記範囲決定部は、移動体の移動経路となる複数の地点について、各地点の座標を含んだ地点情報を取得し、前記地点情報に基づいて、それぞれの軸方向において最大の座標値及び最小の座標値を決定し、決定した前記座標値からフィルタ範囲を定義し、
前記取得部は、前記移動体の移動中における点群データを取得し、
前記マッピング処理部は、前記フィルタ範囲によるフィルタリング後の前記点群データを用いて、マッピング処理を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
14日前
アズビル株式会社
制御装置
7日前
村田機械株式会社
産業機械
28日前
コフロック株式会社
流量制御装置
8日前
トヨタ自動車株式会社
自律移動体
28日前
株式会社クボタ
作業車
28日前
株式会社丸和製作所
入力機器
7日前
株式会社フジキン
流量制御装置
7日前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社明電舎
車両
28日前
株式会社村田製作所
温度補償回路
14日前
株式会社ダイフク
搬送設備
15日前
トヨタ自動車株式会社
ロボットシステム
1か月前
トヨタ自動車株式会社
ロボットシステム
28日前
株式会社ダイフク
物品搬送設備
15日前
株式会社ダイフク
物品搬送設備
21日前
株式会社ダイフク
物品搬送設備
15日前
キヤノン株式会社
情報処理装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
8日前
旭精機工業株式会社
監視データ処理装置
22日前
ブラザー工業株式会社
数値制御装置及び工作機械
28日前
株式会社ディスコ
搬送車
1か月前
ローム株式会社
定電圧生成回路
1か月前
株式会社FUJI
工作機械
8日前
ローム株式会社
定電圧生成回路
28日前
ブラザー工業株式会社
調整方法及び数値制御装置
1日前
富士電機株式会社
制御システム
28日前
株式会社マキタ
作業ロボット
15日前
キヤノン株式会社
制御システム及び制御方法
21日前
株式会社リコー
移動体、プログラム、位置推定方法
1か月前
富士電機株式会社
分析装置、分析方法及びプログラム
25日前
ミネベアパワーデバイス株式会社
半導体装置
21日前
トヨタ自動車株式会社
スキャン制御装置
15日前
ローム株式会社
電源制御装置、電源装置
15日前
トヨタ自動車株式会社
スキャン制御装置
15日前
株式会社FUTU-RE
異常検知システム、および異常検知方法
25日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ