TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025001630
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2024036878
出願日
2024-03-11
発明の名称
移動体、プログラム、位置推定方法
出願人
株式会社リコー
代理人
個人
,
個人
主分類
G05D
1/242 20240101AFI20241225BHJP(制御;調整)
要約
【課題】地図が歪んで作成されてしまう場合であっても、自律移動時における移動体の位置及び姿勢の精度の低下を抑制すること。
【解決手段】操作者による教示走行と、移動経路を自律移動することが可能な移動体であり、移動経路の各結節点及び複数の外界センサに対応付けて、教示走行時に通った結節点と自律移動時に通った地点のずれを計算することが可能な計算情報を作成する情報作成部と、複数の外界センサそれぞれについて、計算情報と自律移動時における外界センサのセンサ値とに基づきずれを算出するずれ算出部と、算出したずれを移動体の位置と姿勢を基準とする移動経路の各結節点の位置及び姿勢として推定する位置推定部と、複数の外界センサそれぞれについて推定された移動経路の各結節点の位置及び姿勢を統合する統合処理部と、統合処理部が統合した移動経路の各結節点の位置及び姿勢に基づいて移動経路を自律移動させる自律移動処理部と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
操作者の手動操作により移動経路を移動させた際の位置と姿勢を記憶させる教示走行と、前記移動経路を自律移動することが可能な移動体であって、
前記移動経路の各結節点及び複数の外界センサに対応付けて、教示走行時に通った結節点と自律移動時に通った地点のずれを計算することが可能な計算情報を作成する情報作成部と、
前記複数の外界センサそれぞれについて、前記計算情報と自律移動時における前記外界センサのセンサ値とに基づき前記ずれを算出するずれ算出部と、
算出した前記ずれを前記移動体の位置と姿勢を基準とする前記移動経路の各結節点の位置及び姿勢として推定する位置推定部と、
前記複数の外界センサそれぞれについて推定された前記移動経路の各結節点の位置及び姿勢を統合する統合処理部と、
前記統合処理部が統合した前記移動経路の各結節点の位置及び姿勢に基づいて前記移動経路を自律移動させる自律移動処理部と、
を有する移動体。
続きを表示(約 2,400 文字)
【請求項2】
移動量と移動方向を検出する1つ以上の内界センサを有し、
前記移動体が手動で移動させられた教示走行時に、
前記移動経路の前記結節点ごとに、前記複数の外界センサそれぞれと前記内界センサとによって得られた前記計算情報を、前記情報作成部が、前記外界センサに対応付けて憶部に保存する、請求項1に記載の移動体。
【請求項3】
前記統合処理部は、前記計算情報が有する信頼性と、自律移動時における前記外界センサのセンサ値の信頼性とに基づいて、前記複数の外界センサそれぞれについて推定された前記移動体の位置と姿勢を基準とする前記結節点の位置及び姿勢を重み付けして、
前記複数の外界センサそれぞれについて推定された前記結節点の位置及び姿勢を統合する請求項1または2に記載の移動体。
【請求項4】
自律移動時に、前記統合処理部が任意の前記結節点において、前記複数の外界センサそれぞれについて推定された前記結節点の位置及び姿勢を統合した場合、
統合された前記結節点の位置及び姿勢と、前記計算情報に含まれる結節点間の相対位置情報に基づいて、任意の前記結節点より後の前記結節点の位置と姿勢を計算し、任意の前記結節点における前記移動体の位置及び姿勢を原点とする前記移動経路を計算する自律移動処理部を有する請求項1に記載の移動体。
【請求項5】
前記複数の外界センサは、GNSS、2D-LiDAR、及び、距離情報を得られるカメラの2つ以上である請求項1に記載の移動体。
【請求項6】
第一外界センサがGNSSである場合、前記計算情報はGNSS座標系の位置と姿勢であり、第二外界センサが2D-LiDARである場合、前記計算情報は2次元占有格子地図であり、
前記位置推定部は、前記第一外界センサについて、前記計算情報に含まれる前記GNSS座標系の位置と姿勢に対する、自律移動時のセンサ値であるGNSS座標系の位置と姿勢のずれを、前記移動体の位置と姿勢を基準とする前記結節点の第一の位置及び姿勢として推定し、
前記第二外界センサについて、前記2次元占有格子地図と自律移動時のセンサ値であるスキャン点群を比較し、前記2次元占有格子地図の原点に対する前記移動体の位置と姿勢のずれを、前記移動体の位置と姿勢を基準とする前記結節点の第二の位置及び姿勢として推定し、
前記統合処理部は、前記第一の位置及び姿勢と第二の位置及び姿勢を統合する請求項5に記載の移動体。
【請求項7】
前記複数の外界センサは、GNSS、3D-LiDAR、及び、距離情報を得られるカメラの2つ以上である請求項1に記載の移動体。
【請求項8】
第一外界センサがGNSSである場合、前記計算情報はGNSS座標系の位置と姿勢であり、第二外界センサが3D-LiDARである場合、前記計算情報は3次元点群地図であり、
前記位置推定部は、前記第一外界センサについて、前記計算情報に含まれる前記GNSS座標系の位置と姿勢に対する、自律移動時のセンサ値であるGNSS座標系の位置と姿勢のずれを、前記移動体の位置と姿勢を基準とする前記結節点の第一の位置及び姿勢として推定し、
前記第二外界センサについて、前記3次元点群地図と自律移動時のセンサ値であるスキャン点群を比較し、前記3次元点群地図の原点に対する前記移動体の位置と姿勢のずれを、前記移動体の位置と姿勢を基準とする前記結節点の第二の位置及び姿勢として推定し、
前記統合処理部は、前記第一の位置及び姿勢と第二の位置及び姿勢を統合する請求項7に記載の移動体。
【請求項9】
操作者の手動操作により移動経路を移動させた際の位置と姿勢を記憶させる教示走行と、前記移動経路を自律移動することが可能な移動体が行う位置推定方法であって、
前記移動経路の各結節点及び複数の外界センサに対応付けて、教示走行時に通った結節点と自律移動時に通った地点のずれを計算することが可能な計算情報を作成する処理と、
前記複数の外界センサそれぞれについて、前記計算情報と自律移動時における前記外界センサのセンサ値とに基づき前記ずれを算出する処理と、
算出した前記ずれを前記移動体の位置と姿勢を基準とする前記移動経路の各結節点の位置及び姿勢として推定する処理と、
前記複数の外界センサそれぞれについて推定された前記移動経路の各結節点の位置及び姿勢を統合する処理と、
統合された前記移動経路の各結節点の位置及び姿勢に基づいて前記移動経路を自律移動させる処理と、
を行う位置推定方法。
【請求項10】
操作者の手動操作により移動経路を移動させた際の位置と姿勢を記憶させる教示走行と、前記移動経路を自律移動することが可能な移動体を、
前記移動経路の各結節点及び複数の外界センサに対応付けて、教示走行時に通った結節点と自律移動時に通った地点のずれを計算することが可能な計算情報を作成する情報作成部と、
前記複数の外界センサそれぞれについて、前記計算情報と自律移動時における前記外界センサのセンサ値とに基づき前記ずれを算出するずれ算出部と、
算出した前記ずれを前記移動体の位置と姿勢を基準とする前記移動経路の各結節点の位置及び姿勢として推定する位置推定部と、
前記複数の外界センサそれぞれについて推定された前記移動経路の各結節点の位置及び姿勢を統合する統合処理部と、
前記統合処理部が統合した前記移動経路の各結節点の位置及び姿勢に基づいて前記移動経路を自律移動させる自律移動処理部、
として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体、プログラム、及び、位置推定方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
化学プラントなどの屋外に設置されている構造物(配管、メータ、バルブなど)に漏れや異常が無いかについて点検する場合、これまでは点検員が、構造物が設置してある場所を巡回し、目視で点検していたが、近年、上記の点検作業について、自律移動する移動体により無人化しようとする技術が開発されている。移動体は、屋外環境ではGNSS(Global Navigation Satellite System)測位技術を使い、比較的狭い屋内環境ではSLAM(Simultaneous Localization and Mapping。)技術を使って、目的地まで自立移動できる。
【0003】
移動体を屋内及び屋外でシームレスに走行可能にする技術が知られている(例えば、特許文献1参照)。特許文献1では、SLAM技術を利用し、距離センサによる距離計測の結果得られた地形データを用いて環境地図を予め作成しておき、自律移動時においては環境地図と各時点の距離データをマップマッチングさせることにより、自己位置推定を行っている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では、例えば、GNSS測位精度が継続的に低下している環境で環境地図が作成されると、地図が歪んで作成されてしまう場合があり、自律移動時における移動体の位置及び姿勢の精度が低下してしまうといった問題があった。
【0005】
本発明は、上記課題に鑑み、地図が歪んで作成されてしまう場合であっても、自律移動時における移動体の位置及び姿勢の精度の低下を抑制する技術を提供する。
【課題を解決するための手段】
【0006】
上記課題に鑑み、本発明は、操作者の手動操作により移動経路を移動させた際の位置と姿勢を記憶させる教示走行と、前記移動経路を自律移動することが可能な移動体であって、前記移動経路の各結節点及び複数の外界センサに対応付けて、教示走行時に通った結節点と自律移動時に通った地点のずれを計算することが可能な計算情報を作成する情報作成部と、前記複数の外界センサそれぞれについて、前記計算情報と自律移動時における前記外界センサのセンサ値とに基づき前記ずれを算出するずれ算出部と、算出した前記ずれを前記移動体の位置と姿勢を基準とする前記移動経路の各結節点の位置及び姿勢として推定する位置推定部と、前記複数の外界センサそれぞれについて推定された前記移動経路の各結節点の位置及び姿勢を統合する統合処理部と、前記統合処理部が統合した前記移動経路の各結節点の位置及び姿勢に基づいて前記移動経路を自律移動させる自律移動処理部と、を有する。
【発明の効果】
【0007】
本発明は、地図が歪んで作成されてしまう場合であっても、自律移動時における移動体の位置及び姿勢の精度の低下を抑制する技術を提供できる。
【図面の簡単な説明】
【0008】
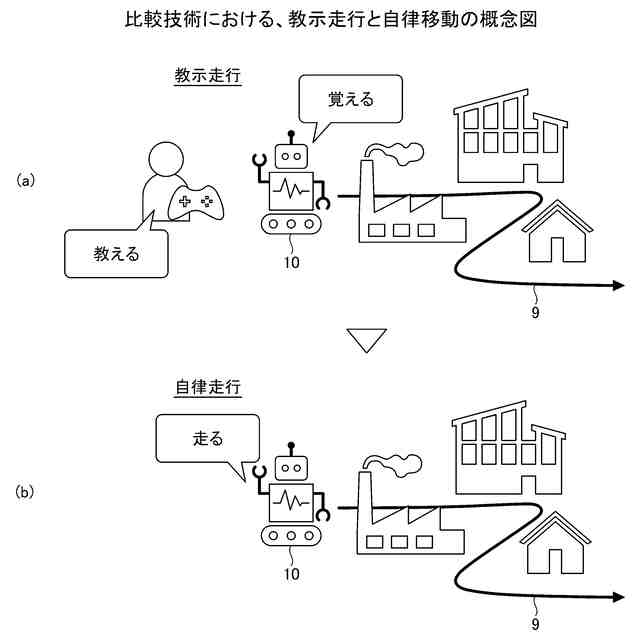
比較技術における、教示走行と自律移動の概念図である。
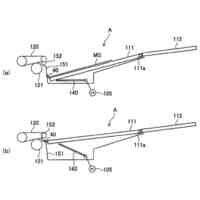
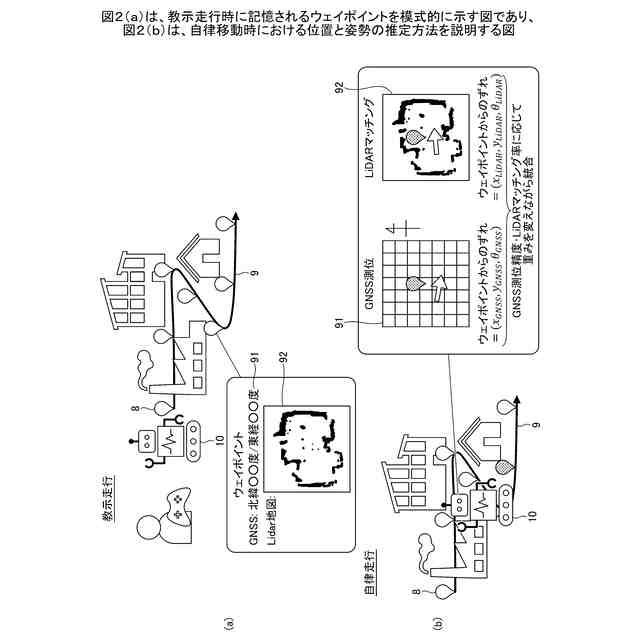
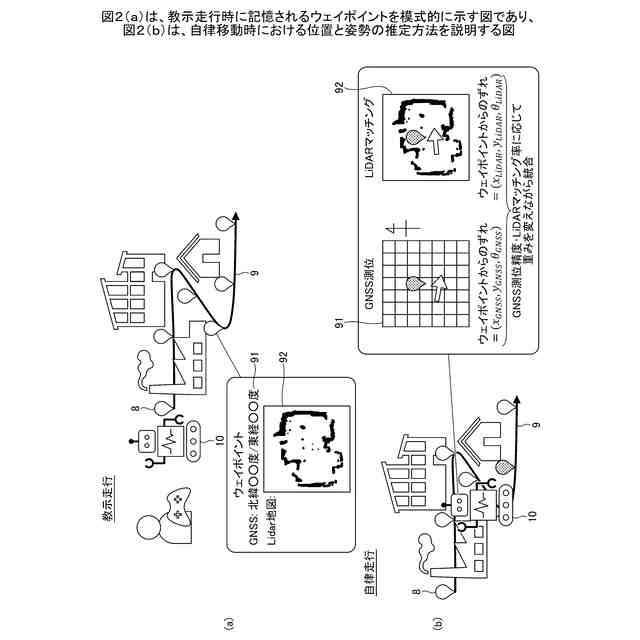
図2(a)は、教示走行時に記憶されるウェイポイントを模式的に示す図であり、図2(b)は、自律移動時における位置と姿勢の推定方法を説明する図である。
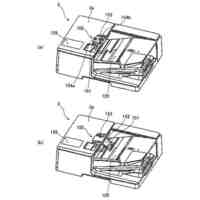
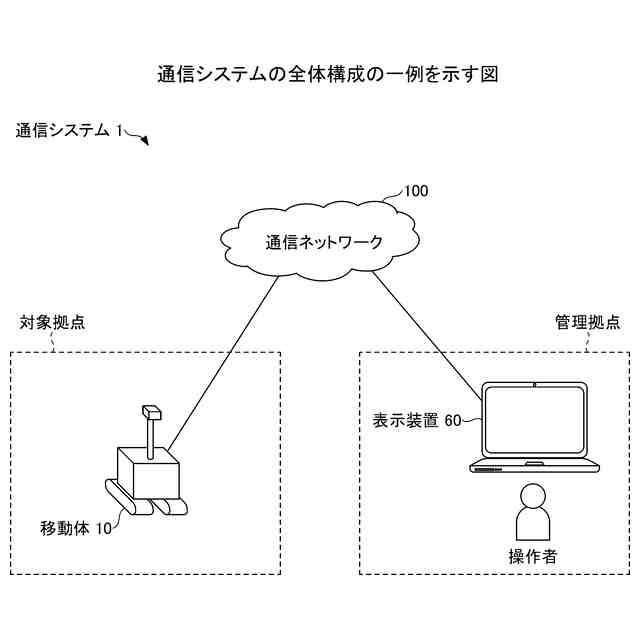
通信システムの全体構成の一例を示す図である。
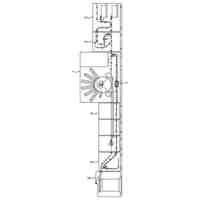
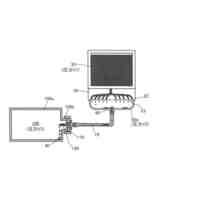
移動体の外観斜視図の一例である。
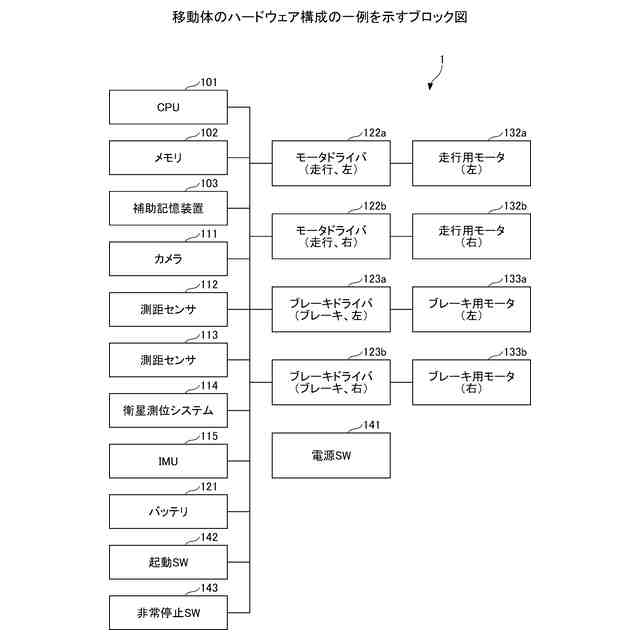
移動体のハードウェア構成の一例を示すブロック図である。
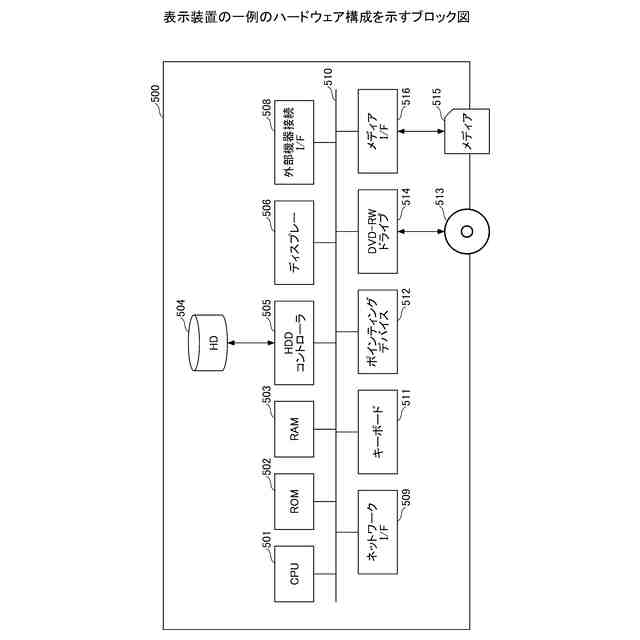
表示装置の一例のハードウェア構成を示すブロック図である。
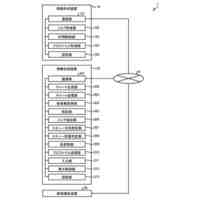
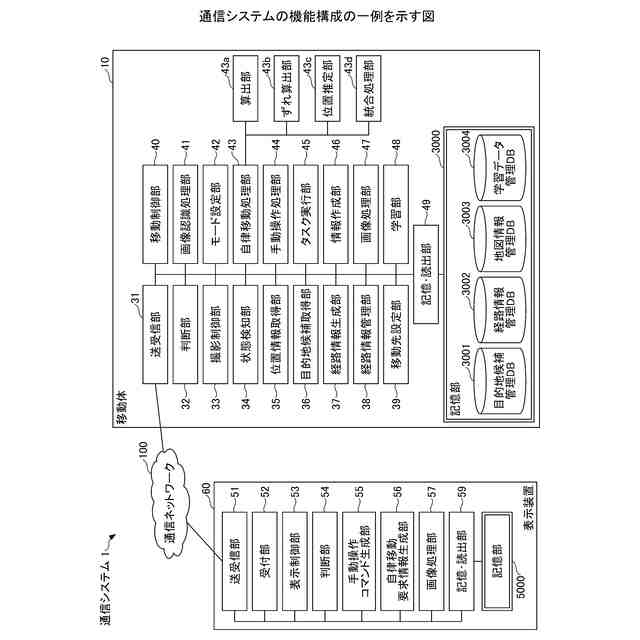
通信システムの機能構成の一例を示す図である。
目的地候補管理テーブルの一例を示す概念図である。
経路情報管理テーブルの一例を示す概念図である。
地図情報管理テーブルの一例を示す概念図である。
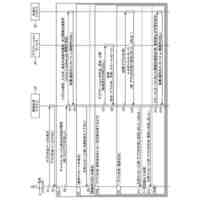
目的地候補の登録処理の一例を示すシーケンス図である。
操作画面の一例を示す図である。
移動体の手動操作処理の一例を示すシーケンス図である。
移動体の移動状態に応じた目的地候補の登録処理の一例を示すフローチャートである。
移動体の目的地の設定処理の一例を示すシーケンス図である。
選択画面の一例を示す図である。
選択画面の一例を示す図である。
移動体の自律移動処理の一例を示すフローチャートである。
トポロジカルマップの概念図である。
外界センサと局所地図を用いた本実施形態の移動制御を示す一例のブロック図である。
ルート教示フェーズの処理を説明する一例のフローチャート図である。
自律移動フェーズの処理を説明する一例のフローチャート図である。
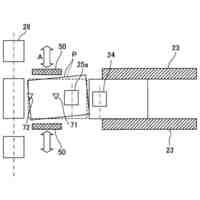
2次元占有格子地図と2D-LiDARのスキャン点群のマッチング計算を模式的に示す図である。
障害物量に基づくb
0
の評価の流れを説明するフローチャート図の一例である。
表示装置がHMDである場合の表示装置のハードウェアブロック図の一例である。
HMDである表示装置が表示した画像データの一例を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明を実施するための形態の一例として移動体、及び、移動体が行う位置推定方法について図面を参照しながら説明する。
【0010】
[第1実施形態]
<測位技術に関する補足>
開けた屋外環境ではGNSS測位技術を使い、比較的狭い屋内環境では測距センサ(LiDAR:Light Detection And Ranging)やカメラを用いて作成した地図を使った自律移動技術(SLAM技術)が発展してきた。また、広大だがGNSS測位精度が必ずしも高くないような場所においても精度のよい位置と姿勢を推定するために、複数のセンサを用いて地図作成・自己位置推定をする技術も知られている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
液体吐出装置
4日前
株式会社リコー
服薬支援装置
4日前
株式会社リコー
定着装置、及び、画像形成装置
2日前
株式会社リコー
後処理装置及び画像形成システム
4日前
株式会社リコー
シート給送装置、及び、画像形成装置
3日前
株式会社リコー
給送装置、画像読取装置及び画像形成装置
11日前
株式会社リコー
給送装置、画像読取装置及び画像形成装置
3日前
株式会社リコー
画像形成装置、画像形成方法、およびプログラム
3日前
株式会社リコー
指標部材、給送装置、画像読取装置及び画像形成装置
2日前
株式会社リコー
液体を吐出する装置、真空廃液タンク及びノズル吸引方法
4日前
株式会社リコー
情報処理システム、サーバ装置、情報処理方法及びプログラム
9日前
株式会社リコー
情報処理装置、情報処理システム、情報処理方法及びプログラム
10日前
株式会社リコー
情報処理装置、情報処理システム、情報処理方法およびプログラム
11日前
株式会社リコー
情報処理装置、アプリ生成システム、プログラム、アプリケーション生成方法
2日前
株式会社リコー
イベント管理システム、イベント管理装置、イベント管理方法及びプログラム
4日前
株式会社リコー
画像処理装置、画像形成システム、画像処理方法およびプログラム
2日前
株式会社リコー
プログラム、表示を提供する方法、通信端末および画像通信システム
9日前
アズビル株式会社
制御装置
2か月前
エイブリック株式会社
基準電圧回路
16日前
和研工業株式会社
多連レバー機構
29日前
コフロック株式会社
流量制御装置
2か月前
株式会社クボタ
作業車
19日前
スター精密株式会社
工作機械
1か月前
株式会社丸和製作所
入力機器
2か月前
株式会社豊田自動織機
荷役車両
2か月前
株式会社ダイフク
搬送車
19日前
ローム株式会社
半導体集積回路
24日前
株式会社フジキン
流量制御装置
2か月前
株式会社シンテックホズミ
搬送ロボット
2か月前
エイブリック株式会社
ボルテージレギュレータ
16日前
トヨタ自動車株式会社
工作機械の制御装置
17日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
株式会社ダイフク
物品搬送設備
17日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社やまびこ
走行制御装置
4日前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ