TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025009168
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023111983
出願日
2023-07-07
発明の名称
異常検知システム、および異常検知方法
出願人
株式会社FUTU-RE
代理人
個人
主分類
G05B
23/02 20060101AFI20250110BHJP(制御;調整)
要約
【課題】マルチレベルフローモデルのモデリング手法を採用し、制御系が複雑でありかつその時系列での変化がたとえばプラントと比較して大きい場合でも、その制御系の異常を迅速に検知するとともにその異常箇所を特定および可視化することができる異常検知装置および異常検知方法を提供する。
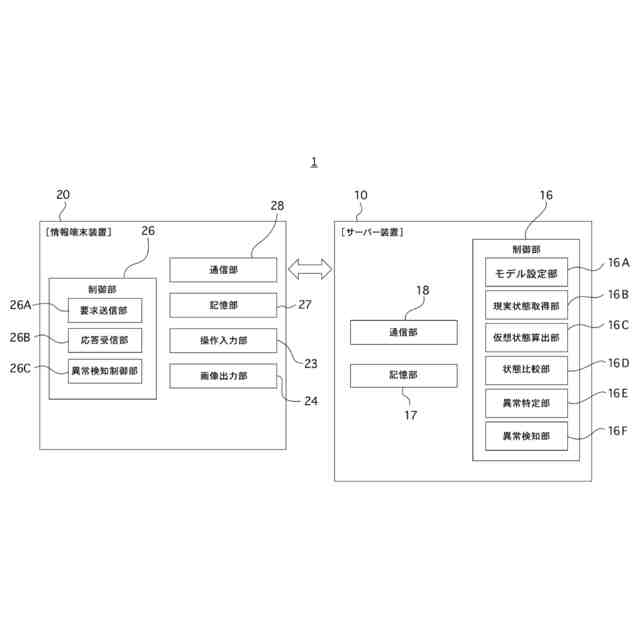
【解決手段】異常検知システム1は、電気回路系(回路系の一例)も含んで構成されて現実に稼働する所定のモータ制御系(制御系の一例)に対しハードウェア的に接続して、当該制御系をソフトウェア上でモデル化した上で当該制御系の異常を検知する異常検知システム1である。異常検知システム1は、マルチレベルフローモデルの手法に従って制御系の機能のそれぞれに個別に対応する複数の機能要素Fを設けるモデル設定部16Aを含んで構成される。
【選択図】図5
特許請求の範囲
【請求項1】
回路系も含んで構成されて現実に稼働する所定の制御系に対しハードウェア的に接続して、当該制御系をソフトウェア上でモデル化した上で当該制御系の異常を検知する異常検知システムであって、
マルチレベルフローモデルの手法に従って前記制御系の機能のそれぞれに個別に対応する複数の機能要素を設け、互いに直列に接続してその上端からその末端に向かってシリアルに情報が流れる前記複数の機能要素で表現される1つのメイングループと、互いに直接に接続してその上端からその末端に向けてシリアルに情報が流れる前記複数の機能要素で表現されるとともにそのそれぞれの最末端の前記機能要素で前記メイングループの前記複数の機能要素のうちいずれか1つに接続する1または複数のサブグループと、を設定するモデル設定部と、
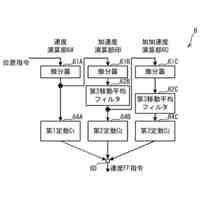
前記メイングループおよび前記複数のサブグループのそれぞれにおける前記複数の機能要素のそれぞれの現実の状態量を取得し当該状態量を行列形式で表現する現実状態取得部と、
前記メイングループおよび前記複数のサブグループのそれぞれにおいて、当該メイングループまたは当該サブグループに属する前記機能要素の個数のそれぞれと同一の数量で複数の仮想状態量を行列形式で算出する仮想状態算出部と、
前記仮想状態算出部の算出した前記複数の仮想状態量のそれぞれに対し、前記現実状態取得部の取得結果と比較する状態比較部と、
前記状態比較部の比較結果に基づいて、異常が発生した前記機能要素を特定する異常特定部と、を含む、
異常検知システム。
続きを表示(約 3,700 文字)
【請求項2】
前記複数のサブグループが第L番目まで設定されており、前記サブグループのうち第j(jは自然数;j=1,・・・,L)番目において前記複数の機能要素がその最上端からその情報の流れに沿って計数してその最末端の第M(Mは自然数)番目まで設定される場合において、
前記現実状態取得部は、前記第j番目の前記サブグループにおける第k(kは自然数;k=1,・・・,M)番目の前記機能要素の現実の前記状態量S
jk
(前記第j番目のサブグループにおける前記第k番目の前記機能要素の前記状態量を示す)のそれぞれをベクトル形式で表現するとともに、前記第j番目の前記サブグループの全体での現実の前記状態量を示すサブ全体状態量P
j
を後記の数式1に従って行列形式で表現し、
前記仮想状態算出部は、当該第j番目の前記サブグループにおける前記複数の仮想状態Q
jk
を後記の数式2に従って算出し、
前記状態比較部は、その対象とする前記サブグループごとに、当該サブグループの前記複数の仮想状態Q
jk
のそれぞれに対し当該サブグループの前記サブ全体状態量P
j
を比較して一致するか否かを判定する、
請求項1に記載の異常検知システム。
[数式1]
P
j
=(S
j1
S
j2
・・・ S
j(M-1)
S
jM
)
ただし、jは自然数;j=1,・・・,L
[数式2]
Q
jk
=(S
j1
・・・ S
j(k-1)
S
jk
T
1
1
・S
jk
・・・ T
1
M-k
・S
jk
)
ただし、j,kはいずれも自然数;j=1,・・・,L;k=1,・・・,M
T
j
は、当該第j番目の前記サブグループにおいて隣接して配置される前記機能要素の間に設定される仮想異常伝達関数である。
【請求項3】
前記異常特定部の特定結果に基づいて、前記制御系の機能における異常箇所を検知する異常検知部と、をさらに含み、
前記仮想状態量Q
jk
は、前記第j番目の前記サブグループにおける前記第k番目の前記機能要素に対応するものとして設定され、
前記異常特定部は、前記状態比較部での比較の結果、当該第j番目のサブグループにおいて1つのみ一致する場合にはその一致した前記仮想状態量Q
jk
に基づいて当該仮想状態量Q
jk
に対応する前記第k番目の前記機能要素を特定し、あるいは当該第j番目のサブグループにおいて複数一致する場合、その一致した複数の前記仮想状態量Q
jk
に基づいて、当該仮想状態量Q
jk
の対応する前記機能要素のうち最も上側に配置される前記機能要素を特定し、
前記異常検知部は、前記異常特定部によって特定した前記機能要素に対応する前記制御系の機能に異常が発生していることを検知する、
請求項2に記載の異常検知システム。
【請求項4】
前記メイングループにおいて、前記複数の機能要素がその最上端からその情報の流れに沿って計数してその最末端の第N(Nは自然数)番目まで設定される場合において、
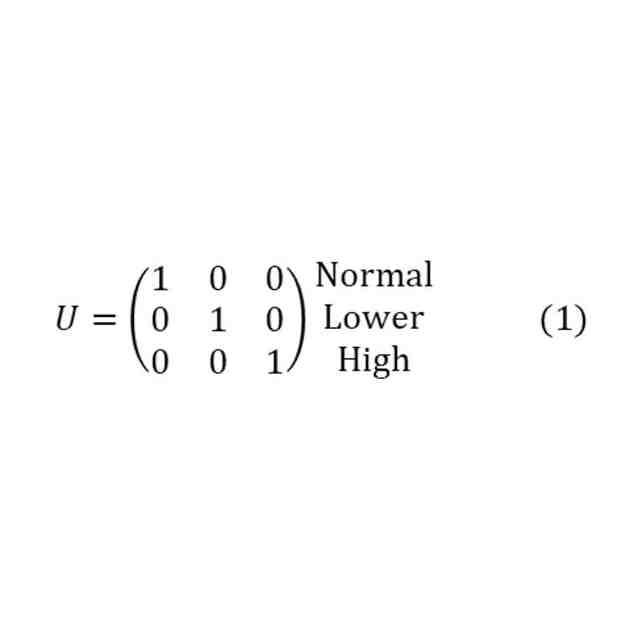
前記現実状態取得部は、前記メイングループにおける第i(iは自然数;i=1,・・・,N)番目の前記機能要素の前記状態量U
i
(前記メイングループにおける前記第i番目の前記機能要素の前記状態量を示す)のそれぞれをベクトル形式で表現するとともに、前記メイングループの全体の前記状態量を示すメイン全体状態量Vを後記の数式3に従って行列形式で表現し、
前記仮想状態算出部は、当該メイングループにおける前記複数の仮想状態量W
i
を後記の数式4に従って算出し、
さらに前記仮想状態算出部は、前記メイングループの第x(1<=x<=N)番目の前記機能要素に対して第y(1<=y<=L(Lは自然数))番目の前記サブグループの最末端に配置される前記機能要素が接続する場合、当該複数の仮想状態量W
i
のそれぞれに対し後記の数式4においてその横方向に並列される行列要素のうち前記第x番目よりも次以降の前記行列要素でありかつ後記の仮想伝達関数Tが行列乗算されて算出された前記行列要素と判定される1または複数の前記行列要素にのみ、前記第y番目の前記サブグループの最末端に配置される前記機能要素の実際の前記状態量S
y
をさらにそれぞれ行列乗算して、複数の仮想状態量W
i
’(i=1,・・・,N)を算出し、
前記状態比較部は、前記メイングループの前記複数の仮想状態量W
i
’のそれぞれに対して前記メイン全体状態量Vを比較して一致するか否かを判定する、
請求項1に記載の異常検知システム。
[数式3]
V = (U
1
U
2
・・・ U
N-1
U
N
)
[数式4]
W
i
= (U
1
・・・ U
i-1
U
i
T
1
・U
i
・・・ T
N-i
・U
i
)
ただし、iは自然数;i=1,・・・,N
Tは、前記メイングループにおいて隣接して配置される前記機能要素の間に設定される仮想異常伝達関数である。
【請求項5】
前記異常特定部の特定結果に基づいて、前記制御系の機能における異常箇所を検知する異常検知部と、をさらに含み、
前記仮想状態量W
i
’は、前記メイングループにおける前記第i番目の前記機能要素に対応するものとして設定され、
前記異常特定部は、前記状態比較部での比較の結果、1つのみ一致する場合にはその一致した前記仮想状態量W
i
’に基づいて当該仮想状態量W
i
’に対応する前記第i番目の前記機能要素を特定し、あるいは複数一致する場合、その一致した複数の前記仮想状態量W
i
’に基づいて、当該仮想状態量W
i
’の対応する前記機能要素のうち最も上側に配置される前記機能要素を特定し、
前記異常検知部は、前記異常特定部によって特定した前記機能要素に対応する前記制御系の機能に異常が発生していることを検知する、
請求項4に記載の異常検知システム。
【請求項6】
前記仮想異常伝達関数は、単位行列である、
請求項2または4に記載の異常検知システム。
【請求項7】
所定の装置および/またはプログラムを使用して、回路系も含んで構成されて現実に稼働する所定の制御系にハードウェア的に接続して、当該制御系をソフトウェア上でモデル化した上で当該制御系の異常を検知する異常検知方法であって、
マルチレベルフローモデルの手法に従って前記制御系の機能のそれぞれに個別に対応する複数の機能要素を設け、互いに直列に接続してその上端からその末端に向かってシリアルに情報が流れる前記複数の機能要素で表現される1つのメイングループと、互いに直接に接続してその上端からその末端に向けてシリアルに情報が流れる前記複数の機能要素で表現されるとともにそのそれぞれの最末端の前記機能要素で前記メイングループの前記複数の機能要素のうちいずれか1つに接続する1または複数のサブグループと、を設定するモデル設定ステップと、
前記メイングループおよび前記複数のサブグループのそれぞれにおける前記複数の機能要素のそれぞれの現実の状態量を取得し当該状態量を行列形式で表現する現実状態取得ステップと、
前記メイングループおよび前記複数のサブグループのそれぞれにおいて、当該メイングループまたは当該サブグループに属する前記機能要素の個数のそれぞれと同一の数量で複数の仮想状態量を行列形式で算出する仮想状態算出ステップと、
前記仮想状態算出ステップで算出した前記複数の仮想状態量のそれぞれに対し、前記現実状態取得ステップでの取得結果と比較する状態比較ステップと、
前記状態比較ステップでの比較結果に基づいて、異常が発生した前記機能要素を特定する異常特定ステップと、を含む、
異常検知方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、回路系も含んで構成されて現実に稼働する所定の制御系にハードウェア的に接続して、当該制御系をソフトウェア上でモデル化した上で当該制御系の異常を検知する異常検知システム、および異常検知方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
現実に稼働する所定の制御系に対する異常検知の従来技術として、制御系の状態量を計測する状態量計測装置と、計測量判定装置と、診断装置と、表示装置と、を備えるシステムが知られる(たとえば特許文献1参照)。
なお、特許文献1記載の装置が対象とする制御系は、プラントとされる。
【0003】
特許文献1記載の計測量判定装置は、状態量計測装置からの計測信号に基づいて異常診断の対象とするプラントモデルに対応する状態量を決定し、プラント制御装置からのプラントの稼働スケジュールを参照して基準値およびしきい値により正常・異常を判定する。特許文献1記載の診断装置は、計測量判定装置の判定結果を入力し、プラントモデル上の異常要素をあらかじめ決められた診断手法に従って同定する。特許文献1記載の表示装置は、診断装置の異常診断結果および推論過程を示す情報を表示する。
【0004】
また、他の従来技術として、特許文献1と同様に対象とする制御系がプラントであり、制御系の状態量を計測する状態量計測装置と、計測量判定装置と、診断装置と、表示装置と、を備えるシステムも知られる(たとえば特許文献2参照)。
【0005】
特許文献2記載の計測量判定装置は、状態量計測装置からの計測信号に基づいて異常診断の対象とするプラント機能階層モデルにかかる計測状態量の正常/異常を判定する。また、特許文献2記載の計測量判定装置は、プラント制御装置からのプラントの稼働スケジュールに応じて計測状態量の正常/異常判定用のしきい値の変更およびプラント機能階層モデルにおける各ゴールの優先度を決定する。特許文献2記載の診断装置は、計測量判定装置の判定結果に基づいてプラント機能階層モデル上の異常伝播ネットワークを求め、異常診断を行う。特許文献2記載の表示装置は、診断装置の異常診断結果および推論過程を表示する。
【先行技術文献】
【特許文献】
【0006】
特開平9-190219号公報
特開平10-20932号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、制御系をモデリングして適応的に制御するモデリング手法として、マルチレベルフローモデル(Multi-Level Flow Models: MLFM、以下「MLFM」ともいう。)が知られる。
【0008】
MLFMは、プロセス制御または制御システムの設計などに使用され、現実の物理的な要素がモデル内の要素として表現され、モデルが現実世界とより直接的に対応することが可能となる。さらに、MLFMは、システムダイナミクスの表現が可能である。すなわち、MLFMは、制御系(システム)内のフィードバックループおよび時系列的な変化を適切に表現して、制御系の安定性または振動、成長または衰退などの制御系のダイナミクスを精度よく分析することが可能となる。さらに、MLFMでは、制御系の複雑さを適切に分割および統合することが可能であり、大規模で複雑な制御系を扱う場合でもそのオペレータなどにとってその理解や分析が容易となる。
【0009】
そのように、MLFMは、種々の利点を有するモデリング手法ではあるが、前述の特許文献1および特許文献2のような従来のシステムは、そのモデリング手法としてMLFMまで対応するものではなく、たとえば特許文献1の装置ではマス・エネルギーの流れを表現するニューラル・ネットワークに基づくものである。MLFMへの適用という点で、改善の余地があったといえる。また、前述のように、制御系が複雑でありかつその時系列での変化がたとえばプラントと比較して大きい場合でも、異常検知システムにMLFMのモデル手法を採用することで適応的にかつ迅速に対応することが可能となる。
【0010】
本発明は、前述した事情に鑑みてなされたものであり、その目的は、マルチレベルフローモデルのモデリング手法を採用し、制御系が複雑でありかつその時系列での変化がたとえばプラントと比較して大きい場合でも、その制御系の異常を迅速に検知するとともにその異常箇所を特定および可視化することができる異常検知装置および異常検知方法を提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
制御装置
1か月前
コフロック株式会社
流量制御装置
1か月前
和研工業株式会社
多連レバー機構
9日前
スター精密株式会社
工作機械
25日前
株式会社丸和製作所
入力機器
1か月前
株式会社フジキン
流量制御装置
1か月前
株式会社豊田自動織機
荷役車両
1か月前
ローム株式会社
半導体集積回路
4日前
株式会社シンテックホズミ
搬送ロボット
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
愛知機械テクノシステム株式会社
無人搬送車
18日前
株式会社ダイフク
物品搬送設備
1か月前
アズビル株式会社
制御システムおよび制御方法
10日前
アズビル株式会社
制御システムおよび制御方法
10日前
アズビル株式会社
制御システムおよび制御方法
19日前
日本精工株式会社
制御装置および制御方法
16日前
トヨタ自動車株式会社
自律走行装置
1か月前
チームラボ株式会社
走行システム及び走行路
23日前
ローム株式会社
半導体装置
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
18日前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
19日前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
定電圧生成回路
1か月前
ミツミ電機株式会社
多方向入力装置
2日前
ミツミ電機株式会社
多方向入力装置
2日前
ミツミ電機株式会社
多方向入力装置
16日前
ミツミ電機株式会社
多方向入力装置
2日前
ミツミ電機株式会社
多方向入力装置
16日前
ミツミ電機株式会社
多方向入力装置
16日前
ブラザー工業株式会社
調整方法及び数値制御装置
1か月前
ミツミ電機株式会社
多方向入力装置
2日前
ミツミ電機株式会社
多方向入力装置
2日前
ミツミ電機株式会社
多方向入力装置
16日前
ミツミ電機株式会社
多方向入力装置
16日前
株式会社マキタ
作業ロボット
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ