TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014387
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023116897
出願日
2023-07-18
発明の名称
経路追従制御装置および経路追従制御方法
出願人
日本製鉄株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G05B
13/02 20060101AFI20250123BHJP(制御;調整)
要約
【課題】車両を目標経路に追従させる制御を行う経路追従制御装置において、制御ゲインの調整を容易に行えるようにする。
【解決手段】経路追従制御装置(3)は、位置実績値(y)と車両位置目標値(y
r
)を取得する第1の取得処理(S21)と、車両位置偏差と位置制御ゲイン(K
y
)とに基づき車両(1)の進行方向目標値(θ
r
)を算出する第1の算出処理(S22)と、を含むメジャーループ処理(S2)と、進行方向目標値と進行方向実績値(θ)を取得する第2の取得処理(S31)と、進行方向偏差と方向制御ゲイン(K
θ
)とに基づき車両の走行経路の曲率目標値(κ
r
)を算出する第2の算出処理(S32)と、曲率目標値に基づく情報を出力する出力処理(S33)と、を含むマイナーループ処理(S3)と、を含むカスケード制御(C)を所定周期で繰り返し実行する演算部(33)を備える。
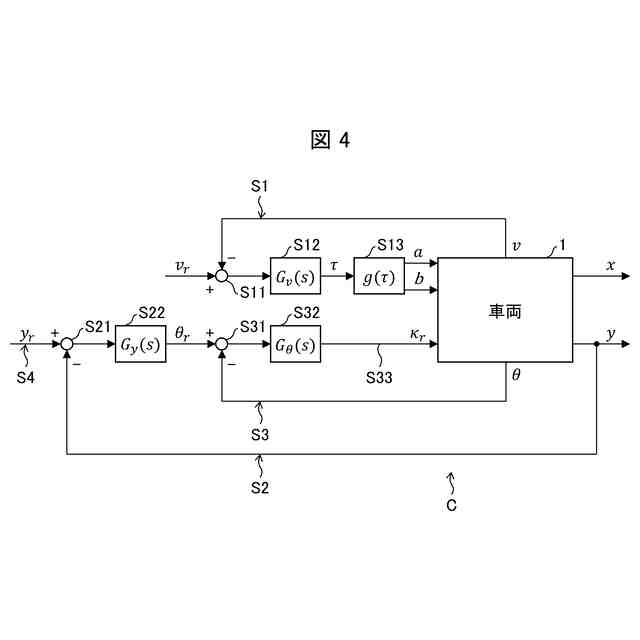
【選択図】図4
特許請求の範囲
【請求項1】
制御対象の車両に接続される経路追従制御装置であって、
前記車両の実際の位置を示す位置実績値と前記車両の位置の目標値である車両位置目標値を取得する第1の取得処理と、前記車両位置目標値と前記位置実績値との偏差である車両位置偏差と位置制御ゲインとに基づき前記車両の進行方向の目標値である進行方向目標値を算出する第1の算出処理と、を含むメジャーループ処理と、
前記第1の算出処理で算出された前記進行方向目標値と前記車両の実際の進行方向を示す進行方向実績値を前記車両から取得する第2の取得処理と、前記進行方向目標値と前記進行方向実績値との偏差である進行方向偏差と方向制御ゲインとに基づき前記車両の走行経路の曲率の目標値である曲率目標値を算出する第2の算出処理と、前記曲率目標値に基づく情報を出力する出力処理と、を含むマイナーループ処理と、
を含むカスケード制御を所定周期で繰り返し実行する演算部を備える、
ことを特徴とする経路追従制御装置。
続きを表示(約 1,900 文字)
【請求項2】
前記演算部は、
前記第1の算出処理において、前記車両位置偏差と、前記位置制御ゲインによって決まる方向算出用伝達関数と、の積を前記進行方向目標値として算出し、
前記第2の算出処理において、前記進行方向偏差と、前記方向制御ゲインによって決まる曲率算出用伝達関数と、の積を曲率目標値として算出するよう構成され、
前記方向算出用伝達関数および曲率算出用伝達関数は、前記車両の速度と逆比例するよう設定されている、
ことを特徴とする請求項1に記載の経路追従制御装置。
【請求項3】
前記位置制御ゲインおよび前記方向制御ゲインは、スカラーであり、
前記車両位置目標値と前記位置実績値との関係は、減衰率および固有角周波数で特徴付けられる2次遅れ系の伝達関数で表される、
ことを特徴とする請求項2に記載の経路追従制御装置。
【請求項4】
前記演算部は、前記メジャーループ処理を開始する前に、所定の目標経路に基づいて、一の時刻における前記位置実績値が示す位置に存在する前記車両が当該一の時刻における前記車両位置目標値が示す位置に移動するのに要する時間である遅れ時間に相当する分だけ、前記位置実績値の取得時よりも未来の前記車両の位置の目標値を前記車両位置目標値として算出する第3の算出処理を実行する、
ことを特徴とする請求項1から3の何れか一項に記載の経路追従制御装置。
【請求項5】
前記演算部は、
前記メジャーループ処理を開始する前に、所定の目標経路に基づいて、前記車両位置目標値を算出する第3の算出処理と、
前記車両位置目標値が示す位置において前記目標経路と接する接線の傾きを算出する第4の算出処理と、
前記車両位置目標値が示す位置における前記目標経路の曲率を算出する第5の算出処理と、
を実行し、
前記第2の取得処理において、前記傾きが加算された前記進行方向目標値を取得し、
前記出力処理において、前記曲率が加算された前記曲率目標値に基づく情報を前記車両へ出力する、
ことを特徴とする請求項1から3の何れか一項に記載の経路追従制御装置。
【請求項6】
、
前記曲率目標値を変化させてから前記進行方向実績値が変化するまでの間に応答のむだ時間が存在する場合、前記演算部は、前記第2の算出処理において、過去の前記曲率目標値を用いて算出した、現在から前記むだ時間経過後の前記位置実績値の予測値、および前記進行方向実績値の予測値に基づいて、現在の前記曲率目標値を算出する、
ことを特徴とする請求項1から3の何れか一項に記載の経路追従制御装置。
【請求項7】
前記演算部は、
前記曲率目標値に基づき、前記車両の前後方向と車輪が転がる方向とがなす角の大きさである操舵角を決定する決定処理を実行し、
前記出力処理において、前記操舵角を前記曲率目標値に基づく情報として出力する、
ことを特徴とする請求項1から3の何れか一項に記載の経路追従制御装置。
【請求項8】
前記演算部は、
前記曲率目標値に基づき、前記車両の進行方向の時間変化量である角速度を決定する決定処理を実行し、
前記出力処理において、前記角速度を前記曲率目標値に基づく情報として出力する、
ことを特徴とする請求項1から3の何れか一項に記載の経路追従制御装置。
【請求項9】
制御対象の車両を目標経路に追従させる経路追従制御方法であって、
前記車両の実際の位置を示す位置実績値と前記車両の位置の目標値である車両位置目標値を取得する第1の取得ステップと、
前記車両位置目標値と前記位置実績値との偏差である車両位置偏差と位置制御ゲインとに基づき前記車両の進行方向の目標値である進行方向目標値を算出する第1の算出ステップと、
前記第1の算出ステップにおいて算出された前記進行方向目標値と前記車両の実際の進行方向を示す進行方向実績値を前記車両から取得する第2の取得ステップと、
前記進行方向目標値と前記進行方向実績値との偏差である進行方向偏差と方向制御ゲインとに基づき前記車両の走行経路の曲率の目標値である曲率目標値を算出する第2の算出ステップと、
前記曲率目標値に基づく情報を出力する出力ステップと、
を所定周期で繰り返す、
ことを特徴とする経路追従制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、経路追従制御装置および経路追従制御方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、目標経路に沿って車両を自動的に走行させる各種の経路追従制御技術が提案されている。例えば特許文献1には、曲率が変化するような任意の目標経路に対して、目標経路上に、車両位置が目標経路の法線方向になるように参照点を設け、その座標系に対して、座標系を車両位置の絶対座標系から参照点を基準とした相対座標系に変換するとともに、目標経路からの相対的な横ずれ及び方位角のずれを計算又は計測し、ずれ量に応じたフィードバック的な操作量と、目標経路の曲率及び横ずれ量に応じたフィードフォワード的な操作量により、操舵角を決定する走行制御方法及び装置について記載されている。
【0003】
また、特許文献2は、目標経路に対する車両の横方向の位置ずれである車両位置偏差を演算する位置偏差演算部と、目標経路との間の方位偏差を演算する方位偏差演算部と、位置偏差と目標位置偏差とを入力パラメータとして第1操舵値を出力する第1制御演算部と、方位偏差と目標方位偏差と位置偏差とを入力パラメータとして第2操舵値を出力する第2制御演算部と、第1操舵値と前記第2操舵値とに基づいて目標経路に沿って走行するための操舵角を決定する自動走行圃場作業車両について記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2002‐215239号公報
特開2019‐038535号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
車両を自動運転させた結果、目標経路に対する追従の精度が十分でなかった場合には、各制御装置において操舵角の算出に用いられる制御ゲインを、人の手でそれぞれ調整する必要が生じる。しかし、従来技術はいずれも、目標経路に対する車両の横方向のずれである車両位置偏差を制御する制御装置と、進行方向と車両が向く方位との差異である進行方向偏差を制御する制御装置が並列して動作するようになっている。そして、従来技術は、それぞれの制御装置で算出される操舵角を統合して最終的な操舵角を決定するようになっている。このため、従来技術では、一方の制御装置の制御ゲインの調整結果が他方の制御装置の制御ゲインの調整に影響することがあった。このように、一方の制御ゲインが他方の制御装置の性能と何らかの関係を有している場合、各制御ゲインの調整を同時に行う必要がある。このような調整は手間がかかってしまうし、調整に手間取ることで調整が不十分になってしまうこともある。
【0006】
本発明の一態様は、車両を目標経路に追従させる制御を行う経路追従制御装置において、制御ゲインの調整を容易に行えるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様に係る経路追従制御装置は、制御対象の車両に接続される経路追従制御装置であって、前記車両の実際の位置を示す位置実績値と前記車両の位置の目標値である車両位置目標値を取得する第1の取得処理と、前記車両位置目標値と前記位置実績値との偏差である車両位置偏差と位置制御ゲインとに基づき前記車両の進行方向の目標値である進行方向目標値を算出する第1の算出処理と、を含むメジャーループ処理と、前記第1の算出処理で算出された前記進行方向目標値と前記車両の実際の進行方向を示す進行方向実績値を前記車両から取得する第2の取得処理と、前記進行方向目標値と前記進行方向実績値との偏差である進行方向偏差と方向制御ゲインとに基づき前記車両の走行経路の曲率の目標値である曲率目標値を算出する第2の算出処理と、前記曲率目標値に基づく情報を出力する出力処理と、を含むマイナーループ処理と、を含むカスケード制御を所定周期で繰り返し実行する演算部を備える。
【0008】
本発明の他の態様に係る経路追従制御方法は、制御対象の車両を目標経路に追従させる経路追従制御方法であって、前記車両の実際の位置を示す位置実績値と前記車両の位置の目標値である車両位置目標値を取得する第1の取得ステップと、前記車両位置目標値と前記位置実績値との偏差である車両位置偏差と位置制御ゲインとに基づき前記車両の進行方向の目標値である進行方向目標値を算出する第1の算出ステップと、前記第1の算出ステップにおいて算出された前記進行方向目標値と前記車両の実際の進行方向を示す進行方向実績値を前記車両から取得する第2の取得ステップと、前記進行方向目標値と前記進行方向実績値との偏差である進行方向偏差と方向制御ゲインとに基づき前記車両の走行経路の曲率の目標値である曲率目標値を算出する第2の算出ステップと、前記曲率目標値に基づく情報を出力する出力ステップと、を所定周期で繰り返す。
【発明の効果】
【0009】
本発明の一態様によれば、車両を目標経路に追従させる制御を行う経路追従制御装置において、制御ゲインの調整を容易に行うことができる。
【図面の簡単な説明】
【0010】
本発明の一態様の実施形態に係る経路追従制御装置の機械的構成の一例を示すブロック図である。
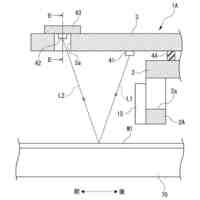
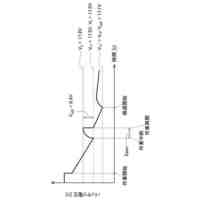
同実施形態に係る経路追従制御装置が制御対象とする車両、目標経路および各値の関係を示す模式図である。
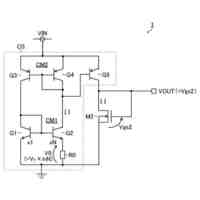
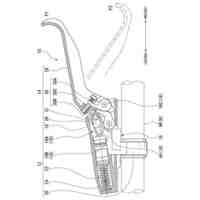
同実施形態に係る経路追従制御装置が制御対象とする車両の操舵動作モデルの一例を示すブロック図である。
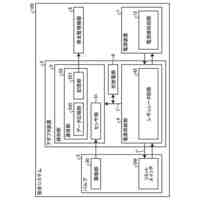
同実施形態に係る経路追従制御装置の機能的構成の一例を示すブロック図である。
同実施形態に係る経路追従制御装置の制御により自動走行した車両の軌跡および目標経路を示すグラフである。
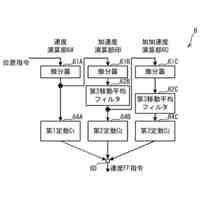
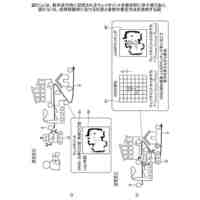
変形例1に係る経路追従制御装置の機能的構成、および制御対象の車両の操舵動作モデルの一例を示すブロック図である。
変形例1に係る経路追従制御装置の動作の考え方について説明する図である。
変形例1に係る経路追従制御装置の制御により自動走行した車両の軌跡および目標経路を示すグラフである。
変形例2に係る経路追従制御装置の機能的構成、および制御対象の車両の操舵動作モデルの一例を示すブロック図である。
変形例2に係る経路追従制御装置の制御により自動走行した車両の軌跡および目標経路を示すグラフである。
変形例3に係る経路追従制御装置の機能的構成、および制御対象の車両の操舵動作モデルの一例を示すブロック図である。
本発明の他の態様の実施形態に係る経路追従制御方法の流れの一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
アズビル株式会社
制御装置
24日前
村田機械株式会社
産業機械
1か月前
トヨタ自動車株式会社
自律移動体
1か月前
コフロック株式会社
流量制御装置
25日前
株式会社丸和製作所
入力機器
24日前
株式会社クボタ
作業車
1か月前
株式会社豊田自動織機
荷役車両
17日前
株式会社明電舎
車両
1か月前
株式会社フジキン
流量制御装置
24日前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社シンテックホズミ
搬送ロボット
6日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社村田製作所
温度補償回路
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
10日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
キヤノン株式会社
情報処理装置
1か月前
旭精機工業株式会社
監視データ処理装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
25日前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
株式会社ディスコ
搬送車
1か月前
株式会社FUJI
工作機械
25日前
ローム株式会社
定電圧生成回路
1か月前
ローム株式会社
定電圧生成回路
10日前
ローム株式会社
定電圧生成回路
1か月前
ブラザー工業株式会社
調整方法及び数値制御装置
18日前
アズビル株式会社
保全システム
17日前
株式会社マキタ
作業ロボット
1か月前
キヤノン株式会社
制御システム及び制御方法
1か月前
株式会社シマノ
人力駆動車の操作装置
17日前
富士電機株式会社
制御システム
1か月前
株式会社リコー
移動体、プログラム、位置推定方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ