TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025014368
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023116864
出願日
2023-07-18
発明の名称
車両制御装置及び車両制御システム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250123BHJP(信号)
要約
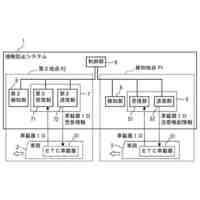
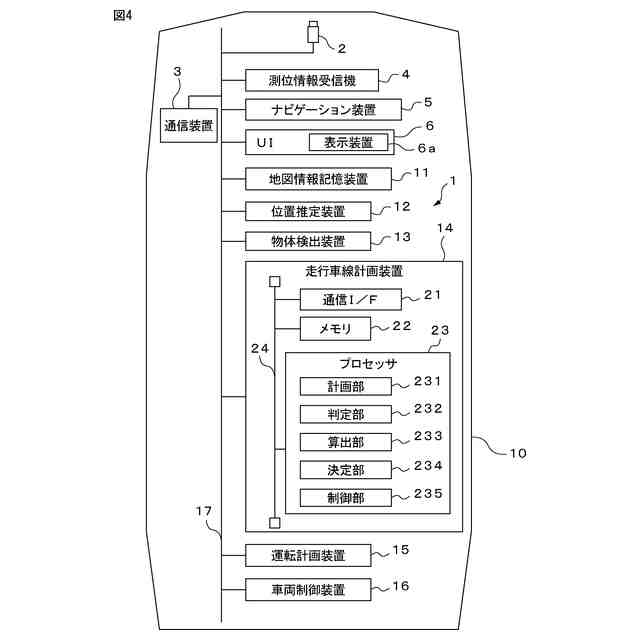
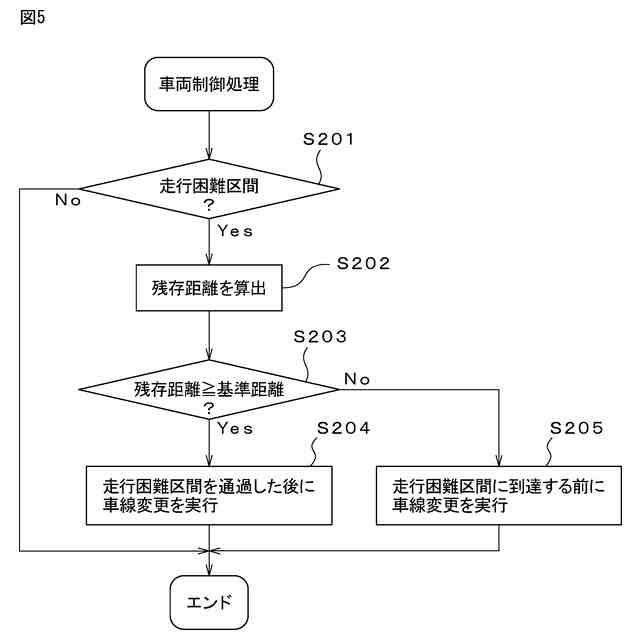
【課題】走行困難区間がある場合、車両が目的車線へ移動するための車線変更を行うことを、渋滞区間の前又は後のいずれで実行するかを決定できる車両制御装置を提供する。
【解決手段】車両制御装置は、車線変更完了位置と車両の現在位置との間に、走行困難区間があるか否かを判定する第1判定部と、走行困難区間があると判定された場合、走行困難区間における車両の進行方向における終端と、車線変更完了位置との間の第1距離を算出する算出部と、第1距離が基準距離以上であるか否かを判定する第2判定部と、第1距離が基準距離以上であると判定された場合、車両が走行困難区間を通過した後に、車両が目的車線へ移動するための車線変更を実行することを決定し、及び、第1距離が基準距離未満であると判定された場合、車両が走行困難区間へ到達する前に、車両が目的車線へ移動するための車線変更を実行することを決定する決定部とを有する。
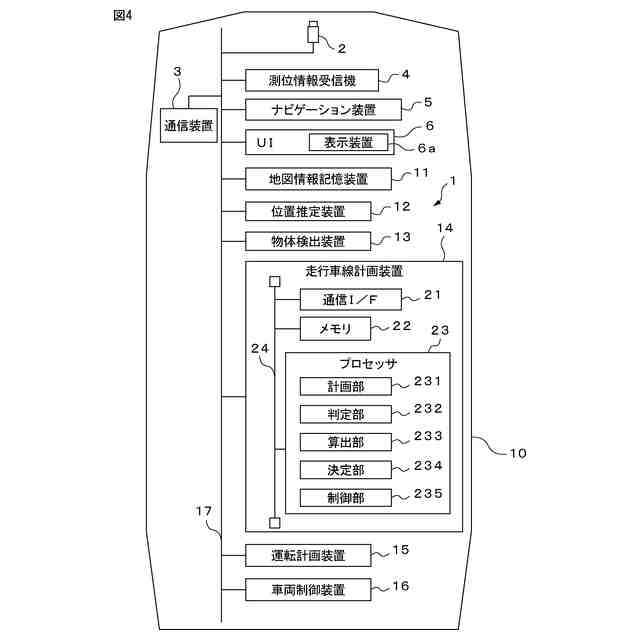
【選択図】図4
特許請求の範囲
【請求項1】
複数の車線を有する道路のうちの一の車線である目的車線上に設定された、車両が目的車線から他の車線への移動を完了する車線変更完了位置と、車両の現在位置との間に、車両が走行することが困難な走行困難区間があるか否かを判定する第1判定部と、
前記第1判定部によって前記走行困難区間があると判定された場合、前記走行困難区間における車両の進行方向における終端と、前記車線変更完了位置との間の第1距離を算出する算出部と、
前記第1距離が基準距離以上であるか否かを判定する第2判定部と、
前記第2判定部によって前記第1距離が前記基準距離以上であると判定された場合、車両が前記走行困難区間を通過した後に、車両が前記目的車線へ移動するための車線変更を実行することを決定し、及び、前記第2判定部によって前記第1距離が前記基準距離未満であると判定された場合、車両が前記走行困難区間へ到達する前に、車両が前記目的車線へ移動するための車線変更を実行することを決定する決定部と、
を有する、
ことを特徴とする車両制御装置。
続きを表示(約 1,400 文字)
【請求項2】
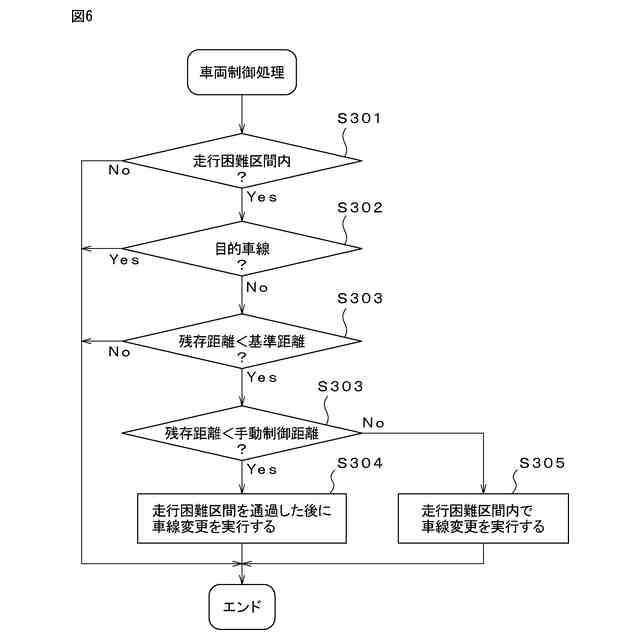
前記決定部によって、車両が前記走行困難区間を通過した後に、車両が前記目的車線へ移動するための車線変更を実行することが決定された場合、車両が前記走行困難区間内に位置しているか否かを判定する第3判定部と、
前記第3判定部によって車両が前記走行困難区間内に位置していると判定された場合、車両の現在位置が前記目的車線に位置しているか否かを判定する第4判定部と、
前記第4判定部によって、車両の現在位置が前記目的車線に位置していないと判定された場合、前記算出部によって新たに算出された前記第1距離が基準距離未満であるか否かを判定する第5判定部と、
前記第5判定部によって前記第1距離が基準距離未満であると判定された場合、前記第1距離はドライバが手動制御で車両を前記目的車線へ移動させることが可能な第2距離以上であるか否かを判定する第6判定部と、
を有する、請求項1に記載の車両制御装置。
【請求項3】
前記第6判定部によって、前記第1距離が前記第2距離以上であると判定された場合、手動制御で車両を前記目的車線へ移動させることを求める車線変更要求を、通知部を介して、ドライバへ通知する通知制御部を有する、請求項2に記載の車両制御装置。
【請求項4】
車両が走行している道路の複数の車線のそれぞれに対して、前記目的車線から離れる程前記基準距離が長くなるように、車線ごとの前記基準距離が設定されており、
前記算出部は、複数の車線のそれぞれに対して、前記走行困難区間における車両の進行方向側の終端と、前記車線変更完了位置との間の前記第1距離を算出し、
前記第2判定部は、複数の車線のそれぞれに対して、前記第1距離が前記基準距離以上であるか否かを判定し、
前記第2判定部によって、全ての複数の車線のそれぞれに対して、前記第1距離が前記基準距離以上であると判定された場合、前記決定部は、車両が前記走行困難区間を通過した後に、車両が前記目的車線へ移動するための車線変更を実行することを決定する、請求項1から3の何れか一項に記載の車両制御装置。
【請求項5】
複数の車線を有する道路のうちの一の車線である目的車線上に設定された、車両が目的車線から他の車線への移動を完了する車線変更完了位置と、車両の現在位置との間に、車両が走行することが困難な走行困難区間があるか否かを判定する第1判定部と、
前記第1判定部によって前記走行困難区間があると判定された場合、前記走行困難区間における車両の進行方向における終端と、前記車線変更完了位置との間の第1距離を算出する算出部と、
前記第1距離が基準距離以上であるか否かを判定する第2判定部と、
前記第2判定部によって前記第1距離が前記基準距離以上であると判定された場合、車両が前記走行困難区間を通過した後に、車両が前記目的車線へ移動するための車線変更を実行することを決定し、及び、前記第2判定部によって前記第1距離が前記基準距離未満であると判定された場合、車両が前記走行困難区間へ到達する前に、車両が前記目的車線へ移動するための車線変更を実行することを決定する決定部と、
を有する、
ことを特徴とする車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置及び車両制御システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
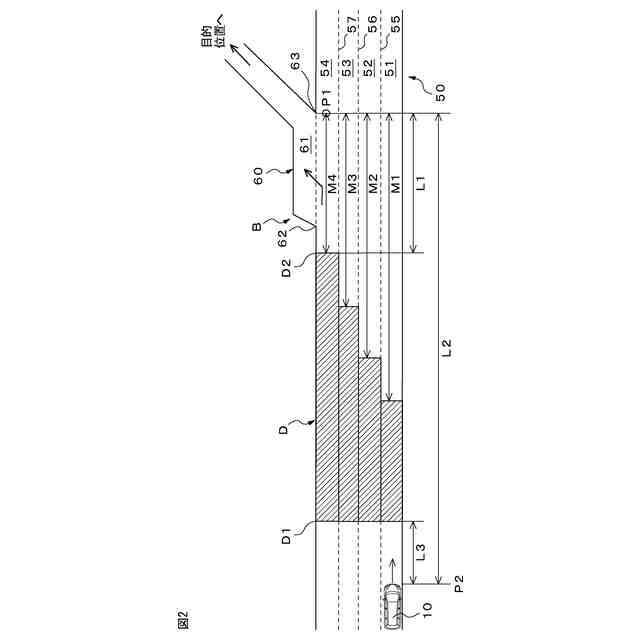
車両が現在走行している走行道路から分岐する分岐道路へ退出する場合、車両の自動制御装置は、分岐道路の車線と隣接する走行道路内の目的車線上に、車線変更完了位置を設定する。車線変更完了位置は、車両が分岐道路の車線への移動を完了する目的車線上の位置である。車両が走行道路内の目的車線以外の他の車線を走行している場合、車両は目的車線へ移動して、車線変更完了位置までに分岐道路の車線へ移動する。
【0003】
一方、車両の現在位置と車線変更完了位置との間に渋滞区間がある場合、渋滞区間内において車両と他車両との間に安全な距離を保って、車両が自動制御で車線間を移動することは困難な場合がある。
【0004】
そこで、車両が目的車線へ移動する場合、車両が渋滞区間を通過した後に車両が目的車線へ移動するための車線変更を行うこと、及び、車両が渋滞区間に到達する前に車両が目的車線へ移動するための車線変更を行うことがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
特許第7123645号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
車両が渋滞区間を通過した後に車両が目的車線へ移動するための車線変更を行う場合、車両と車線変更完了位置との距離が短いと、自動制御で車線変更を行えないおそれがある。
【0007】
そこで、本開示は、車両の現在位置と車線変更完了位置との間に走行困難区間がある場合、車両が目的車線へ移動するための車線変更を行うことを、渋滞区間の前又は後のいずれで実行するかを決定できる車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)一の実施形態によれば、車両制御装置が提供される。この車両制御装置は、複数の車線を有する道路のうちの一の車線である目的車線上に設定された、車両が目的車線から他の車線への移動を完了する車線変更完了位置と、車両の現在位置との間に、車両が走行することが困難な走行困難区間があるか否かを判定する第1判定部と、第1判定部によって走行困難区間があると判定された場合、走行困難区間における車両の進行方向における終端と、車線変更完了位置との間の第1距離を算出する算出部と、第1距離が基準距離以上であるか否かを判定する第2判定部と、第2判定部によって第1距離が基準距離以上であると判定された場合、車両が走行困難区間を通過した後に、車両が目的車線へ移動するための車線変更を実行することを決定し、及び、第2判定部によって第1距離が基準距離未満であると判定された場合、車両が走行困難区間へ到達する前に、車両が目的車線へ移動するための車線変更を実行することを決定する決定部と、を有する、ことを特徴とする。
【0009】
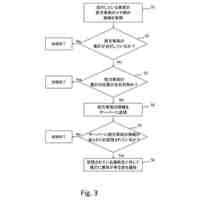
(2)(1)の車両制御装置において、決定部によって、車両が走行困難区間を通過した後に、車両が目的車線へ移動するための車線変更を実行することが決定された場合、車両が走行困難区間内に位置しているか否かを判定する第3判定部と、第3判定部によって車両が走行困難区間内に位置していると判定された場合、車両の現在位置が目的車線に位置しているか否かを判定する第4判定部と、第4判定部によって、車両の現在位置が目的車線に位置していないと判定された場合、算出部によって新たに算出された第1距離が基準距離未満であるか否かを判定する第5判定部と、第5判定部によって第1距離が基準距離未満であると判定された場合、第1距離はドライバが手動制御で車両を目的車線へ移動させることが可能な第2距離以上であるか否かを判定する第6判定部と、を有することが好ましい。
【0010】
(3)(2)の車両制御装置において、第6判定部によって、第1距離が第2距離以上であると判定された場合、手動制御で車両を目的車線へ移動させることを求める車線変更要求を、通知部を介して、ドライバへ通知する通知制御部を有することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
1か月前
個人
火器使用警報装置
3か月前
ニッタン株式会社
煙感知器
2か月前
個人
迷子支援システム
22日前
株式会社ニカデン
検出装置
8日前
株式会社サンライン
発炎筒携行容器
1か月前
株式会社あおい興産
避難誘導灯
16日前
アズビル株式会社
測定システム
3か月前
能美防災株式会社
表示灯カバー
1か月前
株式会社国際電気
防災システム
3日前
ニッタン株式会社
発信機
22日前
ニッタン株式会社
発信機
22日前
ニッタン株式会社
発信機
3か月前
能美防災株式会社
非常放送システム
1か月前
京セラ株式会社
案内システム及び案内方法
2か月前
日本無線株式会社
人物探索システム
2か月前
日本信号株式会社
情報提供システム
3か月前
個人
安全に飛び乗りが可能な低速自動運転車
2か月前
京セラ株式会社
制御装置
22日前
トヨタ自動車株式会社
運転支援システム
2か月前
株式会社F2Fグループ
疲労度判定方法
2か月前
シャープ株式会社
表示装置
1か月前
京セラ株式会社
表示システム
2か月前
株式会社豊田自動織機
運行表示装置
9日前
トヨタ自動車株式会社
照度推定装置
3か月前
トヨタ自動車株式会社
運転支援装置
2か月前
日本信号株式会社
信号システム及び信号灯器
15日前
戸田建設株式会社
検知システム
1か月前
株式会社創発システム研究所
交通検知システム
2か月前
株式会社JR西日本テクシア
接触防止システム
15日前
能美防災株式会社
防災設備
2か月前
トヨタ自動車株式会社
情報提供システム
1か月前
トヨタ自動車株式会社
ドライブレコーダ
2か月前
トヨタ自動車株式会社
渋滞検知システム
2か月前
本田技研工業株式会社
制御装置
1か月前
株式会社ケア・テック
警報システム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ