TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025013547
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2024194619,2023080256
出願日
2024-11-06,2019-01-31
発明の名称
制御装置、学習モデルの学習方法、コンピュータプログラム、および記憶媒体
出願人
株式会社シマノ
代理人
個人
,
個人
主分類
B62J
45/20 20200101AFI20250117BHJP(鉄道以外の路面車両)
要約
【課題】伸縮機構を含むコンポーネントを最適に自動制御するコンポーネントの制御装置、学習モデルの学習方法、コンピュータプログラム、および記憶媒体を提供する。
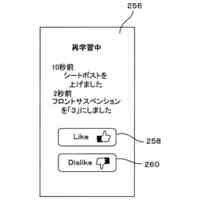
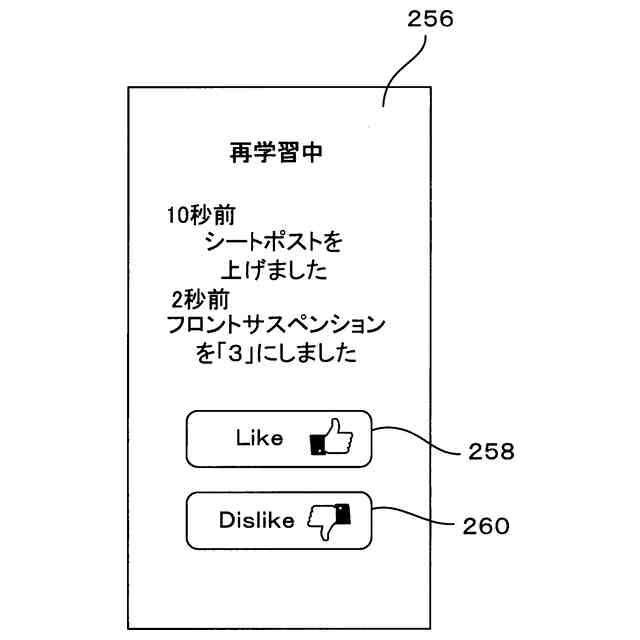
【解決手段】制御装置は、人力駆動車の走行に関する前記人力駆動車の走行情報および前記人力駆動車の走行環境情報の少なくともいずれか1つを含む入力情報に応じて学習モデルによって出力される伸縮機構の制御に関する出力情報に基づいて前記伸縮機構を制御する制御部と、前記学習モデルによって出力される前記出力情報を評価する評価部を備え、前記評価部は、前記人力駆動車のユーザからの前記出力情報に基づく制御に対する評価を受け付ける評価ボタンであり、前記評価部の評価に基づいて前記学習モデルを更新する。
【選択図】図11
特許請求の範囲
【請求項1】
人力駆動車の走行に関する前記人力駆動車の走行情報および前記人力駆動車の走行環境情報の少なくともいずれか1つを含む入力情報に応じて学習モデルによって出力される伸縮機構の制御に関する出力情報に基づいて前記伸縮機構を制御する制御部と、
前記学習モデルによって出力される前記出力情報を評価する評価部を備え、
前記評価部は、前記人力駆動車のユーザからの前記出力情報に基づく制御に対する評価を受け付ける評価ボタンであり、
前記評価部の評価に基づいて前記学習モデルを更新する、制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記評価部は、前記出力情報に基づく制御が快適であった場合に、前記人力駆動車のユーザから選択される高評価ボタンを含む、請求項1に記載の制御装置。
【請求項3】
前記評価部は、前記出力情報に基づく制御が快適でなかった場合に、前記人力駆動車のユーザから選択される低評価ボタンを含む、請求項1に記載の制御装置。
【請求項4】
前記伸縮機構の制御に関する指定操作を前記人力駆動車のユーザから受け付ける操作部を備え、
前記評価ボタンは前記操作部に設けられている、請求項1に記載の制御装置。
【請求項5】
前記操作部は、前記ユーザに前記伸縮機構の制御内容を報知するために設けられる表示部に表示されるボタンを含む、請求項4に記載の制御装置。
【請求項6】
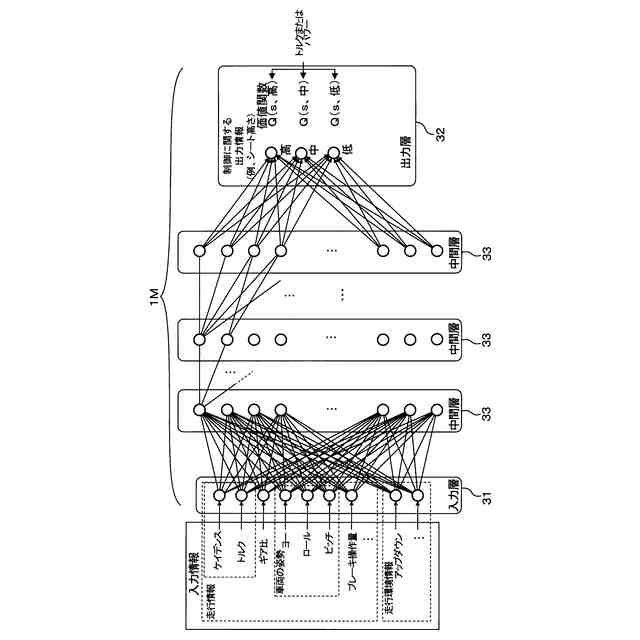
人力駆動車の走行に関する前記人力駆動車の走行情報および前記人力駆動車の走行環境情報の少なくともいずれか1つを含む入力情報が入力された場合に、前記人力駆動車のコンポーネントの内、伸縮機構の制御に関する出力情報を出力するニューラルネットワークを用い、
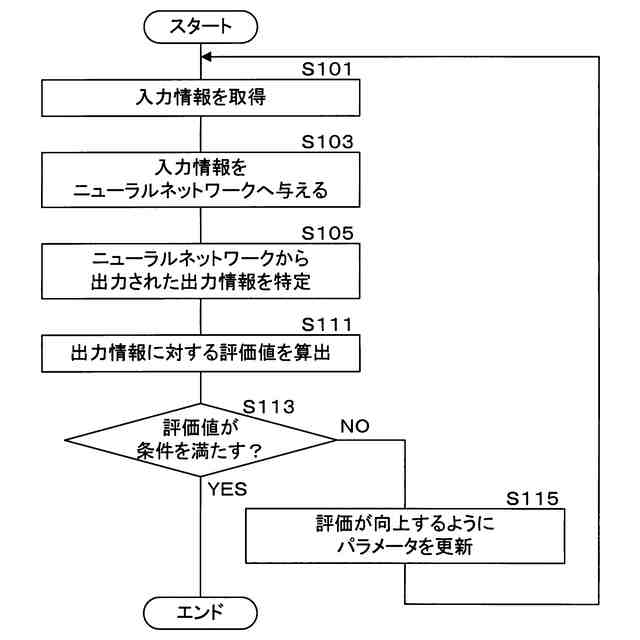
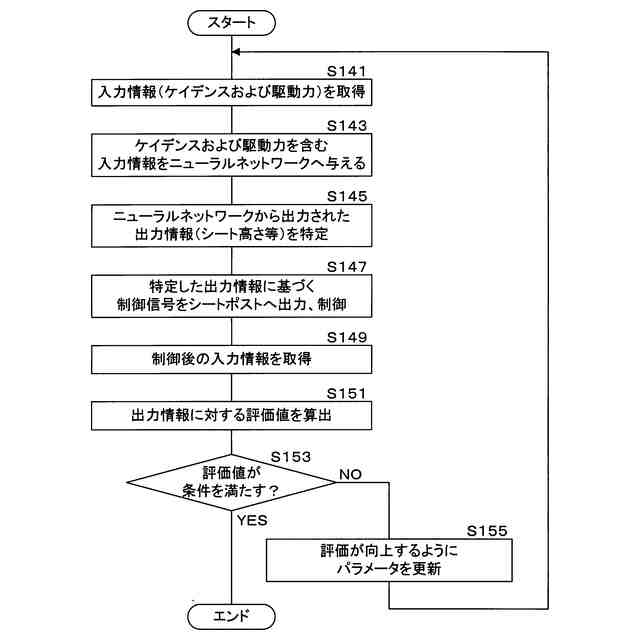
前記人力駆動車の走行に関する入力情報を取得し、
取得した前記入力情報を前記ニューラルネットワークへ与えることによって出力された出力情報を特定し、
特定された前記出力情報に基づいて前記伸縮機構を制御した後の前記人力駆動車の走行状態の評価を、前記人力駆動車のユーザから評価ボタンにより受け付け、
前記評価ボタンにより受け付ける評価が向上するように、前記ニューラルネットワークの中間層におけるパラメータをコンピュータによって学習する、学習モデルの学習方法。
【請求項7】
人力駆動車の走行に関する前記人力駆動車の走行情報および前記人力駆動車の走行環境情報の少なくともいずれか1つを含む入力情報が入力された場合に、前記人力駆動車のコンポーネントの内、伸縮機構を有する部分の制御に関する出力情報を出力するニューラルネットワークを用い、
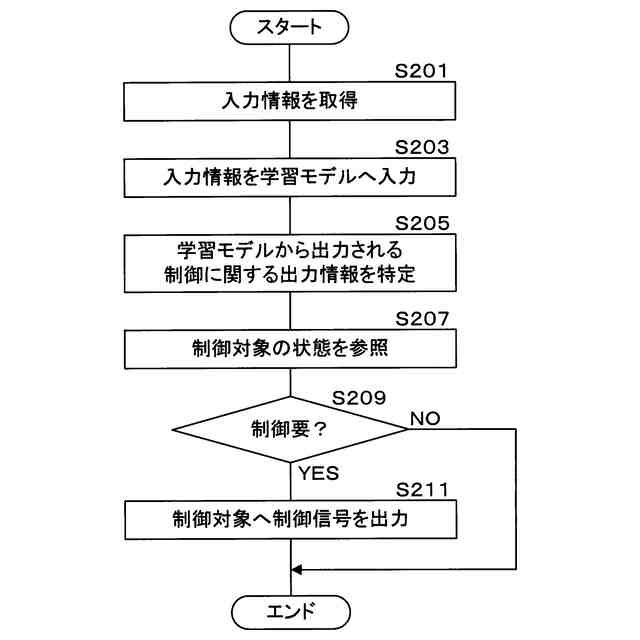
前記人力駆動車の走行に関する入力情報を取得し、
取得した前記入力情報を前記ニューラルネットワークへ与えることによって出力された出力情報を特定し、
特定された前記出力情報に基づいて前記伸縮機構を制御した後の前記人力駆動車の走行状態の評価を、前記人力駆動車のユーザから評価ボタンにより受け付け、
前記評価ボタンにより受け付ける評価を向上させるように、前記ニューラルネットワークの中間層におけるパラメータを学習する処理を、コンピュータに実行させる、コンピュータプログラム。
【請求項8】
請求項7に記載のコンピュータプログラムが記憶される記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、人力駆動車のコンポーネントの制御に関する制御装置、学習モデルの学習方法、コンピュータプログラム、および記憶媒体に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
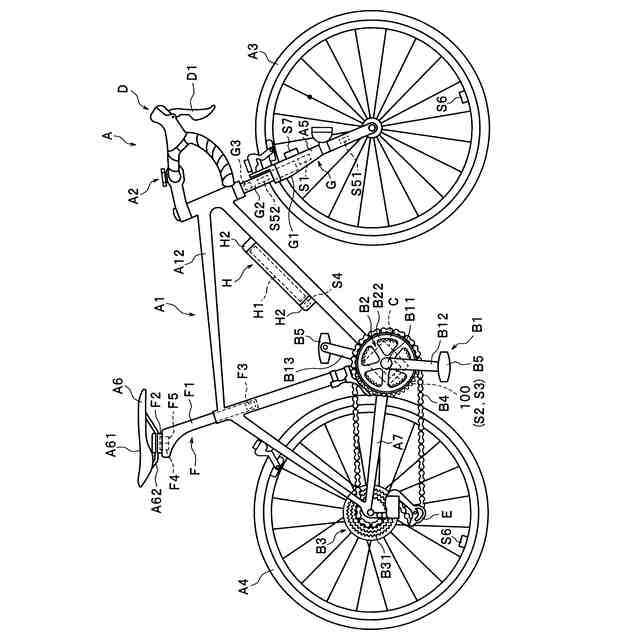
自転車をはじめとして電動アシスト付き自転車、Eバイクと呼ばれる電動自転車等、少なくとも部分的に人力が用いられる人力駆動車がある。人力駆動車は、変速機、ブレーキ装置、シートポスト、またはサスペンション等である複数のコンポーネントを備える。変速機のみならず複数のコンポーネントそれぞれに対し、無線通信信号によって動作指令を送信する方法が提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2018-089989号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
複数のコンポーネントの内、伸縮機構を含むシートポスト、サスペンションは、人力駆動車の乗り心地に大きく関連する振動に関わる。シートポストおよびサスペンションにて、振動の抑制、またはバネ係数を適切な係数とする制御によって、人力駆動車の乗り心地を向上させ、少ない力で効率的な運転を可能とする。乗り手が運転中にシートポストおよびサスペンションを適切に手動で制御するためには技量が必要である。人力駆動車の走行状況、または路面状況、目的に応じた最適な自動制御の実現が、ユーザの嗜好に合わせてなされることが期待される。
【0005】
本発明の目的は、伸縮機構を含むコンポーネントを最適に自動制御するコンポーネントの制御装置、学習モデルの学習方法、コンピュータプログラム、および記憶媒体を提供することである。
【課題を解決するための手段】
【0006】
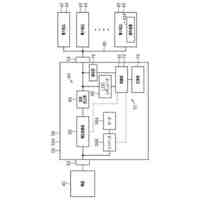
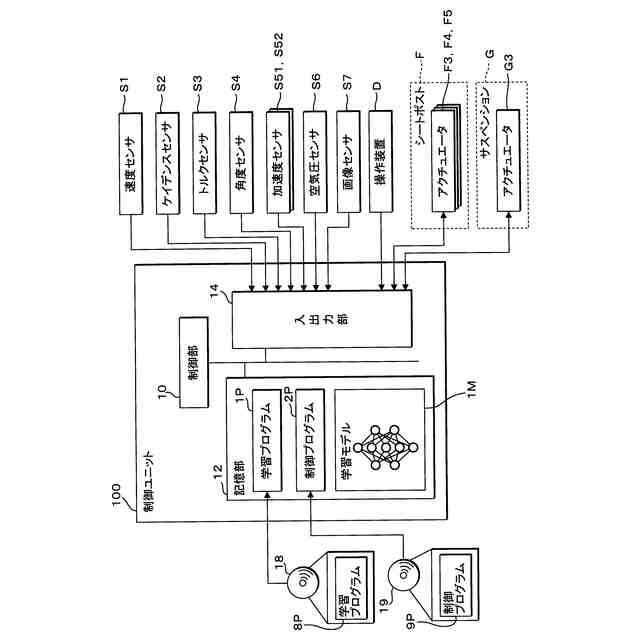
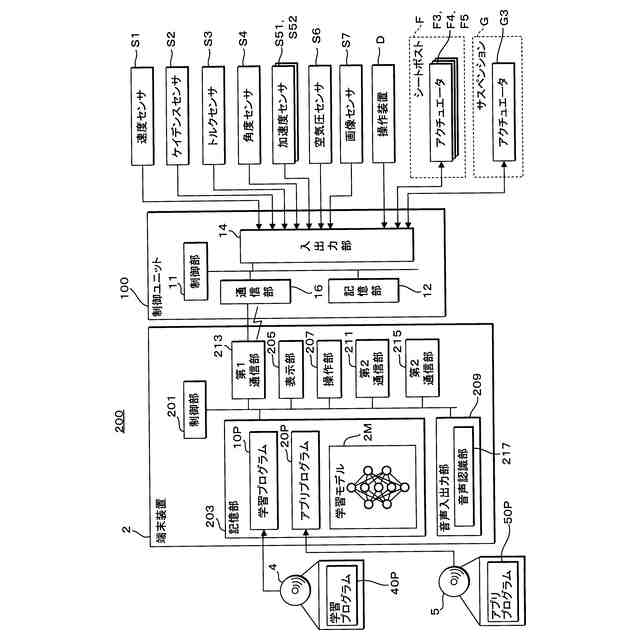
(1)本発明の第1側面に従う制御装置は、人力駆動車の走行に関する入力情報に応じて学習モデルによって出力される伸縮機構の制御に関する出力情報に基づいて前記伸縮機構を制御する制御部を備える。
このため、人力駆動車の走行に関する多様な入力情報に基づく様々なシチュエーションまたは走行環境に合わせた伸縮機構の自動制御が実現される。
【0007】
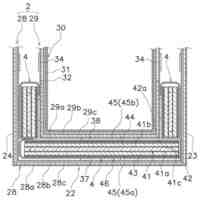
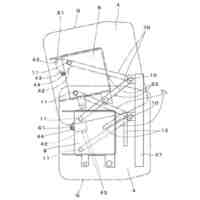
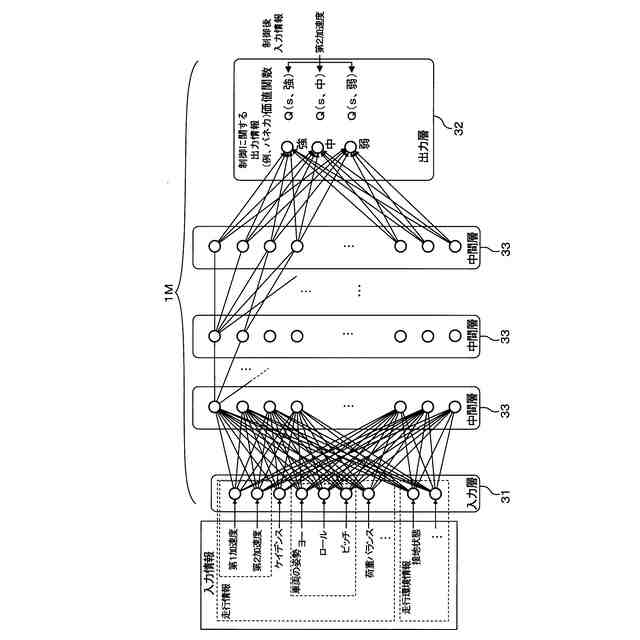
(2)本発明の第2側面に従う制御装置では、前記伸縮機構は、前記人力駆動車のサスペンションであり、前記出力情報は、ストローク長、ロックアウト状態、バネ力、ダンピングレートの内の少なくともいずれか1つを含む。
このため、人力駆動車の走行に関する多様な入力情報に基づく様々なシチュエーションまたは走行環境に合わせた前記人力駆動車のサスペンションの自動制御が実現される。
【0008】
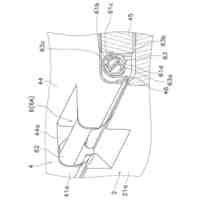
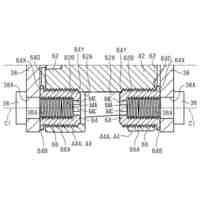
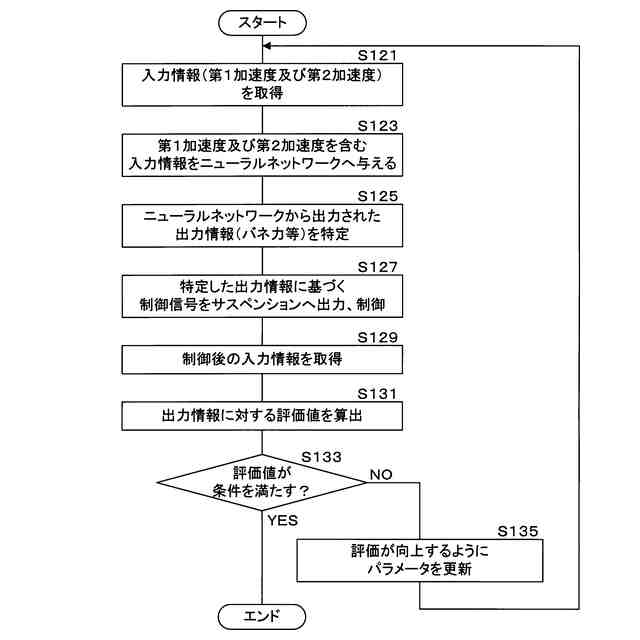
(3)本発明の第3側面に従う制御装置では、サスペンションは、第1部材と、前記第1部材に対して移動可能に設けられる第2部材とを含み、前記入力情報は、前記第1部材に取り付けられる第1加速度センサによって出力される第1加速度と、前記第2部材に取り付けられる第2加速度センサによって出力される第2加速度とを含む。
このため、人力駆動車の走行に関し、可動部材に設けられた加速度センサから得られる振動に関する情報に基づく路面状況に合わせたサスペンションの自動制御が実現される。
【0009】
(4)本発明の第4側面に従う制御装置では、前記学習モデルは、第1加速度と第2加速度との差が所定範囲になるように前記出力情報を出力する。
このため、人力駆動車の走行に関し、路面状況に合わせつつも振動の吸収を適切な範囲内とするサスペンションの自動制御が実現される。
【0010】
(5)本発明の第5側面に従う制御装置は、前記伸縮機構は、前記人力駆動車のシートポストであり、前記出力情報は、シート高さ、座面の傾き、前後位置、および左右位置、の内の少なくともいずれか1つを含む。
このため、人力駆動車の走行に関する多様な入力情報に基づく様々なシチュエーションまたは走行環境に合わせた前記人力駆動車のシートポストの自動制御が実現される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社シマノ
保冷バッグ
17日前
株式会社シマノ
クーラーボックス
19日前
株式会社シマノ
人力駆動車用のコンポーネントおよび歯車
16日前
株式会社シマノ
人力駆動車用の制御装置、人力駆動車用の電源装置、および、人力駆動車用のコンポーネント
2日前
株式会社シマノ
制御装置、学習モデルの学習方法、コンピュータプログラム、および記憶媒体
16日前
個人
折り畳み自転車
2か月前
個人
自転車用傘捕捉具
3か月前
個人
体重掛けリフト台車
2か月前
個人
自転車用荷台
6か月前
井関農機株式会社
作業車両
8か月前
個人
アタッチメント
3か月前
個人
自転車用荷物台
2か月前
個人
キャンピングトライク
16日前
個人
ステアリングの操向部材
20日前
個人
ステアリングの操向部材
6か月前
株式会社CPM
駐輪機
3か月前
三甲株式会社
台車
5か月前
三甲株式会社
台車
5か月前
株式会社三五
リアサブフレーム
2か月前
祖峰企画株式会社
平台車
7か月前
豊田合成株式会社
操舵装置
3か月前
ヤマハ発動機株式会社
車両
3か月前
ヤマハ発動機株式会社
車両
3か月前
ヤマハ発動機株式会社
車両
3か月前
ダイハツ工業株式会社
車両
4か月前
ヤマハ発動機株式会社
車両
3か月前
学校法人千葉工業大学
車両
1か月前
学校法人千葉工業大学
車両
1か月前
学校法人千葉工業大学
車両
1か月前
アルインコ株式会社
運搬台車
8か月前
アルインコ株式会社
運搬台車
8か月前
株式会社クボタ
作業車
6か月前
株式会社クボタ
作業車
6か月前
株式会社カインズ
台車
2か月前
株式会社宝島社
アシスト自転車
6か月前
株式会社アテックス
自走式乗用草刈機
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ