TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025012744
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115815
出願日
2023-07-14
発明の名称
船舶の操縦運動モデルの係数同定プログラム、操縦運動モデルの同定した係数の利用方法、及び操縦運動モデルの係数同定システム
出願人
国立研究開発法人 海上・港湾・航空技術研究所
代理人
個人
,
個人
主分類
B63B
79/20 20200101AFI20250117BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】一般に実船の海上公試等で取得されることが多い操縦性指標を用いて操縦運動モデルの係数を同定する。
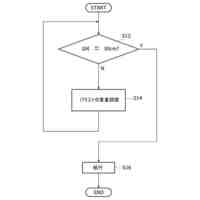
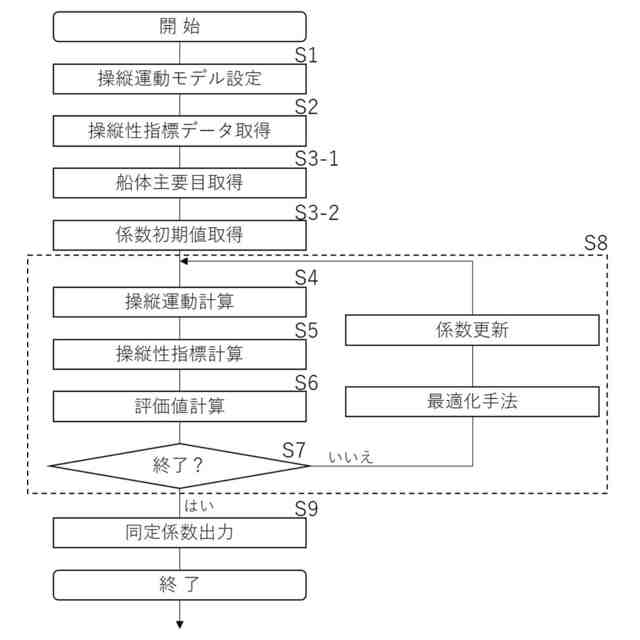
【解決手段】船舶の操縦運動モデルの係数同定プログラムは、コンピュータに、操縦性指標データを取得するステップS2と、操縦運動モデルの係数の初期値を取得するステップS3-2と、係数の初期値を操縦運動モデルに適用し操縦運動の計算を行うステップS4と、操縦運動の計算結果に基づいて操縦性指標を計算するステップS5と、操縦性指標データと操縦性指標とに基づいて評価値を計算するステップS6と、評価値の計算結果と終了判定条件とに基づいて終了を判定するステップS7と、終了が否定された場合に最適化アルゴリズムに基づいて操縦運動モデルの係数を更新し、ステップS4からステップS7を繰り返すステップS8と、終了が肯定された場合に直近で使用した係数を同定した係数として出力するステップS9とを実行させる。
【選択図】図1
特許請求の範囲
【請求項1】
船舶の操縦運動モデルの係数を同定するプログラムであって、
コンピュータに、
前記船舶の操縦性指標データを取得する操縦性指標データ取得ステップと、
設定された操縦運動モデルの前記係数の初期値を取得する係数初期値取得ステップと、
取得した前記係数の前記初期値を前記操縦運動モデルに適用し操縦運動の計算を行う操縦運動計算ステップと、
操縦運動の計算結果に基づいて操縦性指標を計算する操縦性指標計算ステップと、
取得した前記操縦性指標データと計算した前記操縦性指標とに基づいて評価値を計算する評価値計算ステップと、
評価値の計算結果と予め定めた終了判定条件とに基づいて終了を判定する終了判定ステップと、
終了が否定された場合に最適化アルゴリズムに基づいて前記操縦運動モデルの前記係数を更新し、前記操縦運動計算ステップ、前記操縦性指標計算ステップ、前記評価値計算ステップ、及び前記終了判定ステップを繰り返す繰り返しステップと、
終了が肯定された場合に直近で使用した前記係数を同定した係数として出力する同定係数出力ステップとを実行させることを特徴とする船舶の操縦運動モデルの係数同定プログラム。
続きを表示(約 1,000 文字)
【請求項2】
複数の操縦運動モデルの中から選択された前記操縦運動モデルを設定する操縦運動モデル設定ステップをさらに実行させることを特徴とする請求項1に記載の船舶の操縦運動モデルの係数同定プログラム。
【請求項3】
前記操縦運動モデルが、ゲインと時定数を用いた一次遅れ応答モデルであるKTモデル、前記船舶に働く流体力を船体、プロペラ及び舵並びにそれらの干渉項の成分の線形和として表現し、これを外力として前記船舶の運動方程式に入力するモデルであるMMGモデル、並びに低速操縦運動モデルのいずれかであることを特徴とする請求項2に記載の船舶の操縦運動モデルの係数同定プログラム。
【請求項4】
前記係数初期値取得ステップで前記初期値として船体主要目を用いた簡易推定式を用いる場合に、前記船体主要目を取得する船体主要目取得ステップをさらに実行させることを特徴とする請求項1に記載の船舶の操縦運動モデルの係数同定プログラム。
【請求項5】
前記操縦性指標データは、前記船舶の海上公試データであることを特徴とする請求項1に記載の船舶の操縦運動モデルの係数同定プログラム。
【請求項6】
前記操縦性指標データとして、前記海上公試データのスカラー量を用いることを特徴とする請求項5に記載の船舶の操縦運動モデルの係数同定プログラム。
【請求項7】
設定された前記操縦運動モデルに対応して、前記海上公試データのうちの使用するデータを選択することを特徴とする請求項5に記載の船舶の操縦運動モデルの係数同定プログラム。
【請求項8】
前記評価値計算ステップにおける前記評価値の計算は、前記操縦性指標データと前記操縦性指標の差分の重み付き二乗和を用いて行うことを特徴とする請求項1に記載の船舶の操縦運動モデルの係数同定プログラム。
【請求項9】
前記終了判定ステップにおける前記終了を判定する前記終了判定条件は、繰り返し計算数、前記評価値の計算結果の収束、及び前記評価値の計算結果に対する閾値のいずれかであることを特徴とする請求項1に記載の船舶の操縦運動モデルの係数同定プログラム。
【請求項10】
前記繰り返しステップにおける前記係数の更新に当たっての最適化手法として遺伝的アルゴリズムを用いることを特徴とする請求項1に記載の船舶の操縦運動モデルの係数同定プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶の操縦運動モデルの係数同定プログラム、操縦運動モデルの同定した係数の利用方法、及び操縦運動モデルの係数同定システムに関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
離着桟操船の自動化システム等の開発では、実船搭載前のパラメータチューニングのために、計算上において対象船の操縦運動のシミュレーション計算を行う必要がある。
ここで、特許文献1には、非線形の自己回帰モデルによる船舶の航路保持方法において、船舶の海上における時系列データから船舶の動きを表現する動径基底関数を非線形の自己回帰モデルの回帰係数としてもつ統計モデルを作成し、最適制御理論により船舶の希望航路との航路偏差を最小化する最適な指令舵角を得て、この指令舵角による船舶の制御により、航路偏差がより少なくなるように船舶の位置制御を行う非線形の自己回帰モデルによる船舶の航路保持方法が開示されている。
また、特許文献2には、第1の手段として、方位角検出手段から得られるターンレートを針路偏差補正に加味して最適操舵量を算出し、その最適操舵量に基づいて舵角を制御し、第2の手段として、設定針路から所定角度ずらした仮想設定針路を設定し、その仮想設定針路に対する実際の航跡の差である針路偏差を計測し、その針路偏差から針路偏差オフセット値を算出し、その針路偏差オフセット値に基づいて最適操舵量を算出し、その最適操舵量に基づいて舵角を制御する自動操舵装置が開示されている。
また、特許文献3には、入出力データ記憶部からの出力データとモデルパラメータ学習部からのモデル出力との誤差をモデル誤差評価部で評価し、その評価結果に基づいて、ルール・中間層ユニット自己増殖部で、ルールおよび/または中間層ユニットを自動的に発生させてニューロファジィ知識ベースに設定し、知識獲得終了判定部でモデル誤差が最初に指定した値以下と判定されれば知識獲得処理全体を終了し、そうでない場合には上述の処理を繰り返し、ルール・中間層ユニット数がnのときのモデルパラメータの最終的な学習結果を、ルール・中間層ユニット数が(n+1)のときのパラメータ学習過程の初期値に反映させる自己増殖型ニューロファジィ知識獲得装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2014-4911号公報
特開2008-230484号公報
特開平6-35707号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
計算機上において対象船の操縦運動のシミュレーション計算を行うためには、対象船ごとに操縦運動モデルの係数を設定する必要がある。これまで、自由航走の運動時系列を目標とした個船の操舵制御モデルの同定や、拘束模型試験・CFD計算を用いた操縦運動モデルの係数同定が行われてきたが、操縦運動モデルの係数を同定することを目的に実船又は模型船を用いた自由航走試験やCFD計算を行うには、多大な人的・金銭的・時間的コストがかかってしまう。また、自由航走試験の時系列データ等から操縦運動モデルの係数を同定する場合は、データのフォーマットが統一されていないため、実施者毎にデータの加工や1次解析等が必要になる。
ここで、特許文献1~3は、模型試験やCFD計算を用いる従来の手法よりも簡易かつ安価に操縦運動モデルの係数を同定しようとするものではない。特許文献1、2は、いずれも船舶で検出したデータを用いて、その船舶の制御パラメータを直接的に最適化するものであり、特許文献3は、自己増殖型ファジィ知識獲得装置を用いて、指定されたモデル精度を実現する最少のモデル構造および適切なモデルパラメータの初期値を自動的に設定するものであり、船舶に関するものではない。
そこで本発明は、多大なコストがかかる模型試験やCFD計算を必要とせず、一般に実船の海上公試等で取得されることが多い操縦性指標を用いて操縦運動モデルの係数を同定することを目的とする。
【課題を解決するための手段】
【0005】
請求項1記載に対応した船舶の操縦運動モデルの係数同定プログラムにおいては、船舶の操縦運動モデルの係数を同定するプログラムであって、コンピュータに、船舶の操縦性指標データを取得する操縦性指標データ取得ステップと、設定された操縦運動モデルの係数の初期値を取得する係数初期値取得ステップと、取得した係数の初期値を操縦運動モデルに適用し操縦運動の計算を行う操縦運動計算ステップと、操縦運動の計算結果に基づいて操縦性指標を計算する操縦性指標計算ステップと、取得した操縦性指標データと計算した操縦性指標とに基づいて評価値を計算する評価値計算ステップと、評価値の計算結果と予め定めた終了判定条件とに基づいて終了を判定する終了判定ステップと、終了が否定された場合に最適化アルゴリズムに基づいて操縦運動モデルの係数を更新し、操縦運動計算ステップ、操縦性指標計算ステップ、評価値計算ステップ、及び終了判定ステップを繰り返す繰り返しステップと、終了が肯定された場合に直近で使用した係数を同定した係数として出力する同定係数出力ステップとを実行させることを特徴とする。
請求項1に記載の本発明によれば、操縦運動シミュレーションを行うにあたって必要となる船舶の操縦運動モデルの係数を、操縦性指標データを用いることにより従来の手法に比べて簡易かつ低コストで同定することができる。
【0006】
請求項2記載の本発明は、複数の操縦運動モデルの中から選択された操縦運動モデルを設定する操縦運動モデル設定ステップをさらに実行させることを特徴とする。
請求項2に記載の本発明によれば、実船への搭載対象となる自動操船システムの適用範囲に即した運動を表現する操縦運動モデルを、利用者が選択して設定することができる。
【0007】
請求項3記載の本発明は、操縦運動モデルが、ゲインと時定数を用いた一次遅れ応答モデルであるKTモデル、船舶に働く流体力を船体、プロペラ及び舵並びにそれらの干渉項の成分の線形和として表現し、これを外力として船舶の運動方程式に入力するモデルであるMMGモデル、並びに低速操縦運動モデルのいずれかであることを特徴とする。
請求項3に記載の本発明によれば、KTモデル、MMGモデル、又は低速操縦運動モデルを操縦運動モデルとして設定することで、実船への搭載対象となる自動操船システムの適用範囲に即した運動を的確に表現することができる。
【0008】
請求項4記載の本発明は、係数初期値取得ステップで初期値として船体主要目を用いた簡易推定式を用いる場合に、船体主要目を取得する船体主要目取得ステップをさらに実行させることを特徴とする。
請求項4に記載の本発明によれば、解析対象とする船舶の船体主要目を取得して、係数初期値を簡易推定式を利用して得ることができる。
【0009】
請求項5記載の本発明は、操縦性指標データは、船舶の海上公試データであることを特徴とする。
請求項5に記載の本発明によれば、一般に船舶の新造時や改造時に必ず実施する海上公試で取得される操縦性指標を用いて、操縦運動モデルの係数を同定することができる。
【0010】
請求項6記載の本発明は、操縦性指標データとして、海上公試データのスカラー量を用いることを特徴とする。
請求項6に記載の本発明によれば、船舶の操縦性の良し悪しを判定するための指標として国際的に広く認知されているデータのスカラー量を用いることにより、例えば、航跡データの一次加工を必要とすることなく、航跡データが残っていない場合であっても操縦運動モデルの係数を同定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
川下り用船
2か月前
個人
シーアンカー
4か月前
個人
発電船
3か月前
個人
船舶用プロペラ
11か月前
個人
流体抵抗低減省エネ船
10か月前
小柳建設株式会社
台船
5か月前
ウラカミ合同会社
曳航ロボット
6か月前
炎重工株式会社
浮標
25日前
炎重工株式会社
浮標
25日前
個人
水陸両用移動装置
5か月前
炎重工株式会社
移動体
3か月前
個人
船舶
25日前
ダイハツ工業株式会社
ジャケット
7か月前
個人
海洋「いかだ」上の風力発電システム
10か月前
株式会社テラサン
位置保持システム
4か月前
個人
キャタピラ推進式高速船
9か月前
トヨタ自動車株式会社
ガンネル治具
8か月前
ヤマハ発動機株式会社
船外機
25日前
常石造船株式会社
メタノール燃料船
1か月前
誠加興業股分有限公司
呼吸用マスク
6か月前
株式会社神戸タフ興産
船舶の甲板構造
2か月前
川崎汽船株式会社
ドライアイス輸送船
7か月前
炎重工株式会社
自律航行浮遊体
25日前
藤倉コンポジット株式会社
架台
1か月前
株式会社大林組
水中潜行システム
17日前
個人
搬送器材
10か月前
株式会社 ASC
航海用低燃費航行方法
11か月前
ヤマハ発動機株式会社
船外機および船舶
10日前
ヤマハ発動機株式会社
船外機および船舶
4日前
サームトロン株式会社
外付けスラスタ装置
11か月前
ASTI株式会社
操作機構取付構造
3か月前
株式会社小野田産業
シェルタ
7か月前
高階救命器具株式会社
救命具
7か月前
ヤマト発動機株式会社
レース艇
2か月前
個人
水中観察ボート、曲肱システム及び動揺病軽減
8か月前
ヤマハ発動機株式会社
船舶推進機および船舶
7か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ