TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025012718
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115772
出願日
2023-07-14
発明の名称
コンプライアンス機構を備えた保持装置
出願人
株式会社ユーシン精機
代理人
弁理士法人西浦特許事務所
主分類
B25J
17/02 20060101AFI20250117BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】フローティング状態とロック状態を、簡単な構造で形成することができるコンプライアンス機構を備えた保持装置を提供する。
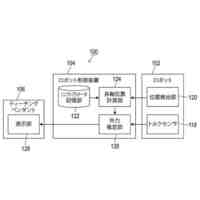
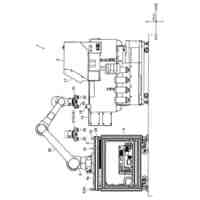
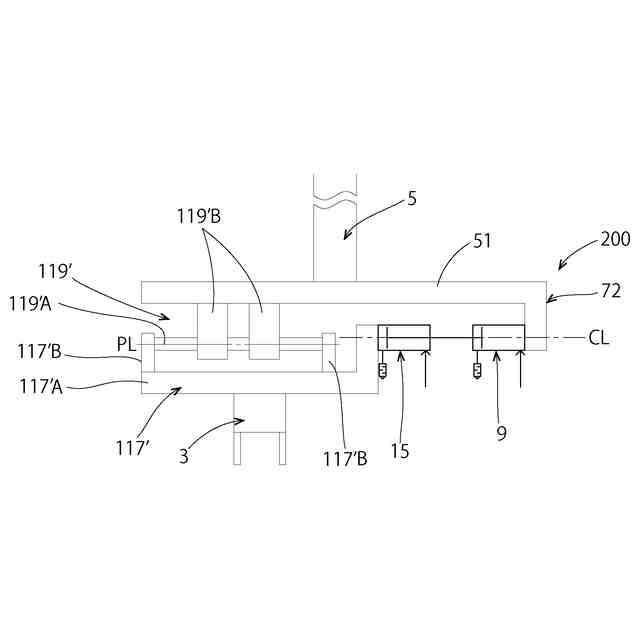
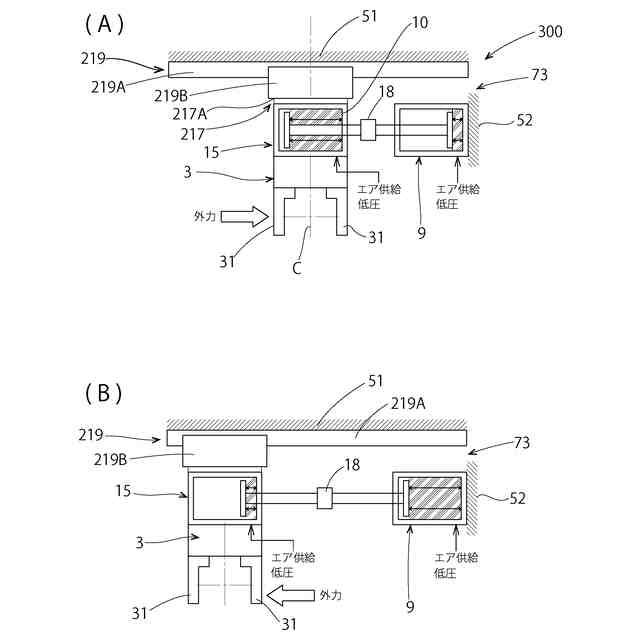
【解決手段】コンプライアンス機構7は、保持部3に掛かる負荷によって変位してワークWを移動させることなく保持できる位置に保持部3を移動させるフローティング状態と、支持部5に対する保持部3の位置の変位を阻止するロック状態を選択的に形成する。コンプライアンス機構7は、フローティング状態において、支持部5に対して装着部17が共通仮想中心線CLと平行な平行線PLに沿ってスライドすることを許容するスライド機構19と、第1のシリンダ機構9及び第2のシリンダ機構15と流体駆動源FSとの間に配置されて、フローティング状態とロック状態を選択的に形成する流体圧回路21を備えている。
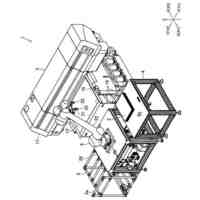
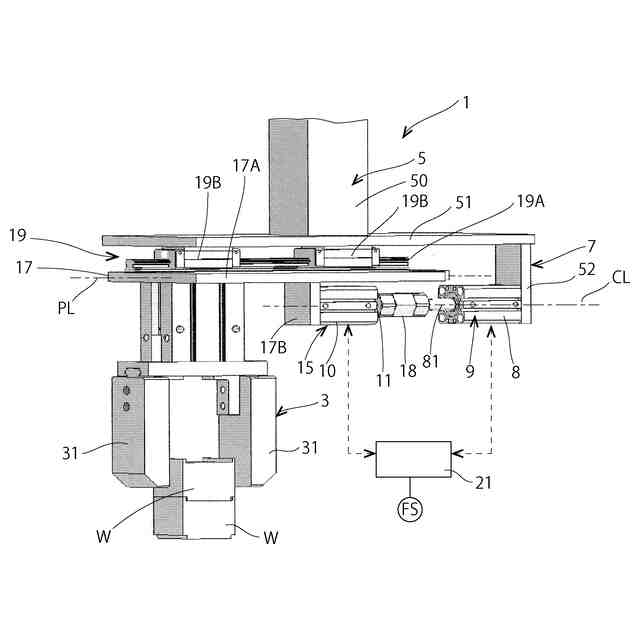
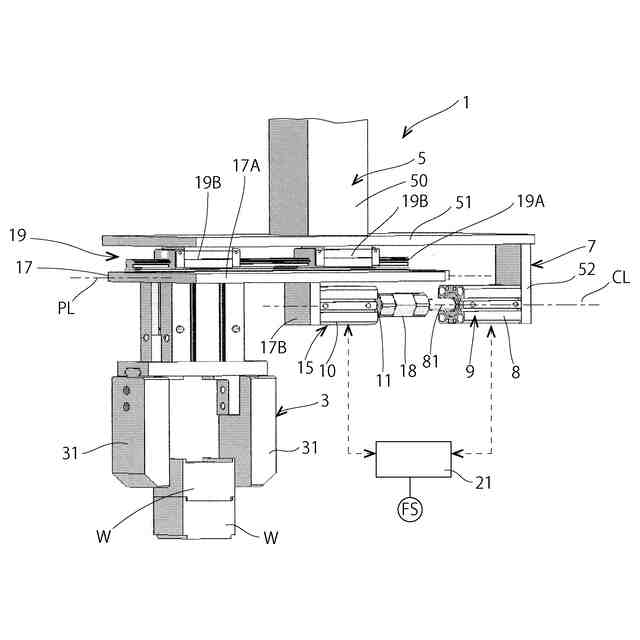
【選択図】 図1
特許請求の範囲
【請求項1】
ワークを保持する保持部と、
前記保持部を支持する支持部と、
前記保持部と前記支持部の間に配置され、前記保持部に掛かる負荷によって変位して前記ワークを移動させることなく保持できる位置に前記保持部を移動させるフローティング状態と、前記支持部に対する前記保持部の位置の変位を阻止するロック状態を選択的に形成するコンプライアンス機構を備えた保持装置であって、
前記コンプライアンス機構は、ロッドを備えて前記支持部に固定された1以上のシリンダを含む第1のシリンダ機構と、
ロッドを備えて前記保持部に装着される装着部に固定された1以上のシリンダを含む第2のシリンダ機構と、
前記第1のシリンダ機構の1以上の前記ロッドと前記第2のシリンダ機構の1以上の前記ロッドを共通仮想中心線に沿って直線移動可能に連結する連結部と、
前記支持部と前記装着部との間に配置されて、前記フローティング状態において、前記支持部に対して前記装着部が前記共通仮想中心線と平行な平行線に沿ってスライドすることを許容するスライド機構と、
前記第1のシリンダ機構及び前記第2のシリンダ機構と流体駆動源との間に配置されて、前記フローティング状態と前記ロック状態を選択的に形成する流体圧回路を備えていることを特徴とするコンプライアンス機構を備えた保持装置。
続きを表示(約 1,100 文字)
【請求項2】
前記流体圧回路は、前記第1のシリンダ機構及び第2のシリンダ機構に供給する流体の圧力として、前記ロック状態を実現する際には、前記第1のシリンダ機構及び第2のシリンダ機構に高い圧力の流体を供給し、前記フローティング状態を実現する際には、前記第1のシリンダ機構及び第2のシリンダ機構に供給する流体の圧力として、前記ロック状態を実現するために前記第1のシリンダ機構及び第2のシリンダ機構に供給する高い圧力よりも低い圧力の流体を供給する請求項1に記載のコンプライアンス機構を備えた保持装置。
【請求項3】
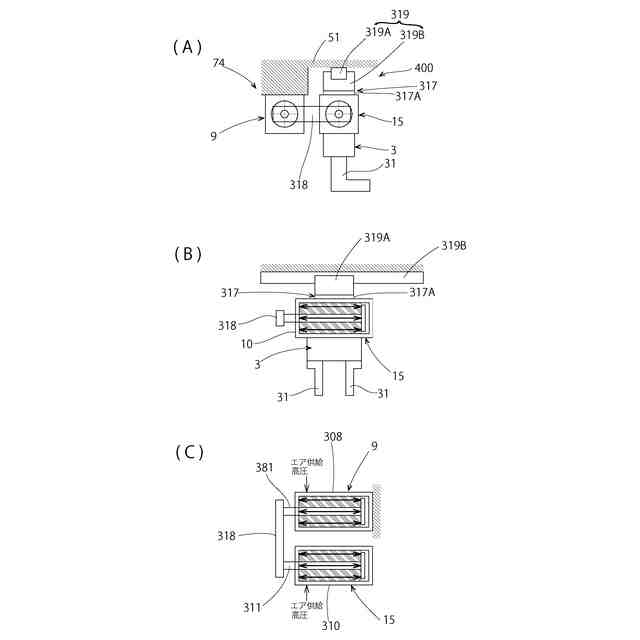
前記支持部は、駆動制御されるフレームと、該フレームと交差する方向に延びる支持体と、該支持体に設けられて前記第1のシリンダ機構が固定される被固定部とからなり、
前記装着部は前記スライド機構を介して前記支持体に沿ってスライドする装着部本体と該装着部本体に設けられて前記第2のシリンダ機構が固定される被固定部からなり、
前記保持部が前記装着部本体に対して取り付けられている請求項1に記載のコンプライアンス機構を備えた保持装置。
【請求項4】
前記フレームと前記支持体の間または前記装着部本体と前記保持部との間には、前記支持体または前記保持部を旋回させる旋回機構が配置されている請求項3に記載のコンプライアンス機構を備えた保持装置。
【請求項5】
前記第1のシリンダ機構及び前記第2のシリンダ機構の少なくとも一方は、それぞれ2以上の前記シリンダが並列に配置されて構成されており、
前記第1のシリンダ機構の1以上の前記ロッドと前記第2のシリンダ機構の1以上のロッドは、前記共通仮想中心線と直交する方向に延びる連結部に固定されている請求項1または2に記載のコンプライアンス機構を備えた保持装置。
【請求項6】
前記流体圧回路は、
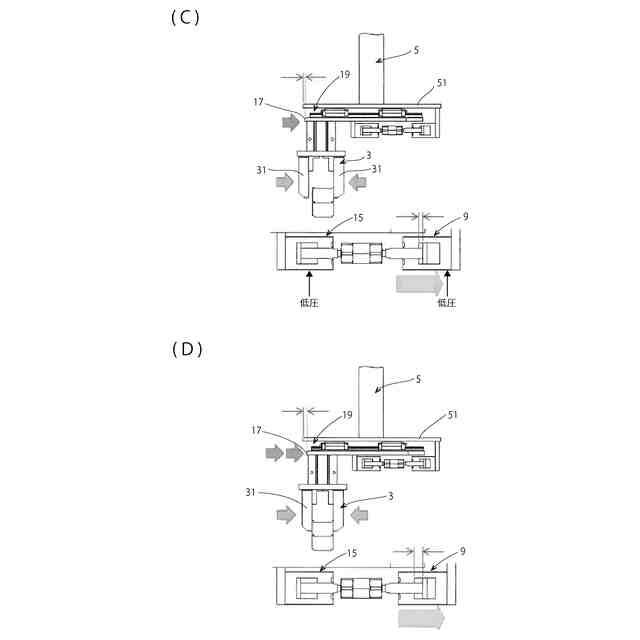
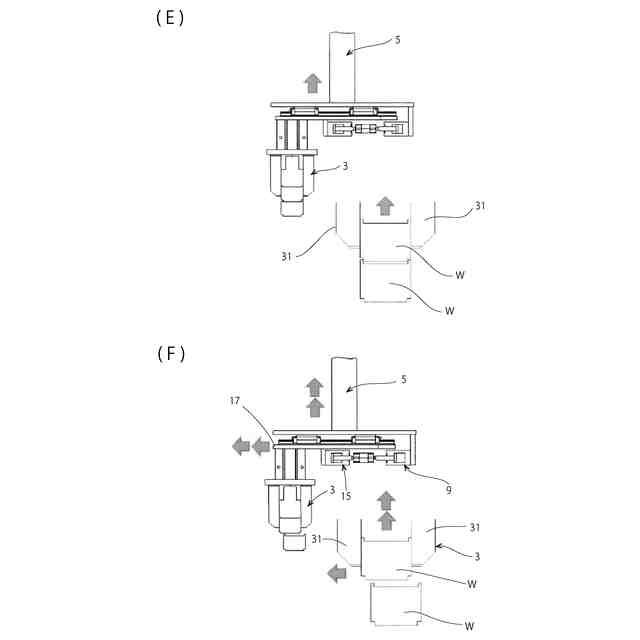
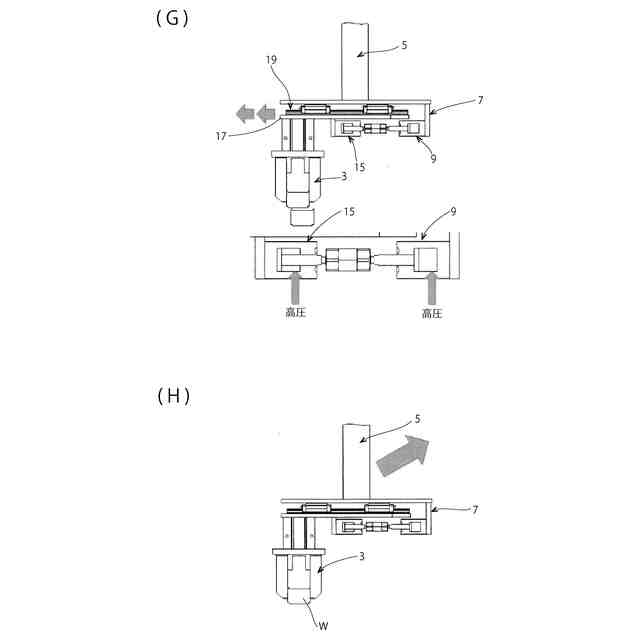
最初に第1及び第2のシリンダ機構に高圧流体を供給して、前記装着部と前記支持部の位置関係をロック状態にし、
その後前記第1及び第2のシリンダ機構に、前記高圧流体よりも低く且つ前記装着部が前記支持部に対して移動することを可能にする低圧力の流体を供給して、前記フローティング状態を形成し、
少なくとも前記保持部が前記ワークを保持するまで前記フローティング状態を維持し、
前記保持部が前記ワークを保持し且つ前記ワークが隣接するワークと非接触状態になった後、前記第1及び第2のシリンダ機構に前記高圧流体を供給して、前記装着部と前記支持部の位置関係をロック状態にする請求項1乃至5のいずれか1項に記載のコンプライアンス機構を備えた保持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワークの保持装置に関し、特にコンプライアンス機構を備えた保持装置に関するものである。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
特開平5-269689号公報(特許文献1)には、フローティング機構を備え且つ保持部として把持部を備えた従来の保持装置が開示されている。この従来の保持装置では、保持部と支持部(本体)の間に配置されたロック手段を含むコンプライアンス機構が、保持部に掛かる負荷によって変位してワークを移動させることなく保持できる位置に保持部を移動させるフローティング状態と、支持部に対する保持部の位置の変位を阻止するロック状態を選択的に形成する。ワークを把持によって保持する際には、保持部のコンプライアンス(柔らかさ)が欲しい。一方、把持したワークをライン状に搭載する際は、ある程度の硬さ(ロック)が必要である。従来の保持装置では、コンプライアンス(柔らかさ)は、フローティング状態で付与する。そして移送中はロック状態で硬さを実現する。
【先行技術文献】
【特許文献】
【0003】
特開平5-269689号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら特許文献1に示された保持装置では、ロック手段の構成が明確に開示されていないために、保持部でワークを保持する前に、ロック状態を選択することによって、保持部を原点位置に戻すのか否かが不明である。そのため特許文献1を見ても、ロック手段を備えたコンプライアンス機構を簡単に構成することができない。保持部を原点位置に戻すことができれば、保持部の位置が支持部に対してどのような位置にある場合でも、保持動作の制御を正確に行える。
【0005】
また特許文献1に示された構造では、フローティング状態で支持部が鉛直方向に対して傾いていると、ワークを持ち上げた途端、鉛直下向き方向にワークを保持した保持部がずれて、ガイド端に衝突して、ワークが衝撃で落下する恐れがある。このような支持部の傾きは、例えば、食品工場において「ウェットエリア」と呼ばれる場所に設置される保持装置において常時生じている。「ウェットエリア」では、清掃のために、生産設備などの配置に合わせた排水計画と適切な床勾配を形成することが重要になる。そのためロボットやパレットの接地面は、床勾配(1.0~2.0/100)を有している。このような床勾配がある場所に保持装置が設置されると、保持部を構成する把持部がワークを持ち上げた瞬間に速やかにロック状態にすればよいが、高速でロック状態にすると、フローティング状態であるために、把持部の爪とワークが衝突しながらセンタリングされることになる。把持部がワークの中央からずれていると、どちらかの爪にワークが接触した際に、フリー状態のため場合によっては弾んで逆側の爪がワークにぶつかる。このようなことがあると、ワークを落下させる恐れがあるだけでなく、チャック爪の摩耗・破損にもつながる問題がある。
【0006】
本発明の目的は、フローティング状態とロック状態を、簡単な構造で形成することができるコンプライアンス機構を備えた保持装置を提供することにある。
【0007】
本発明の更なる目的は、フローティング状態において急に保持部が変位することがないコンプライアンス機構を備えた保持装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明は、ワークを保持する保持部と、保持部を支持する支持部と、保持部と支持部の間に配置されるコンプライアンス機構を備えた保持装置を対象とする。コンプライアンス機構は、保持部に掛かる負荷によって変位してワークを移動させることなく保持できる位置に保持部を移動させるフローティング状態と、支持部に対する保持部の位置の変位を阻止するロック状態を選択的に形成する。コンプライアンス機構は、ロッドを備えて支持部に固定された1以上のシリンダを含む第1のシリンダ機構と、ロッドを備えて保持部が装着される装着部に固定された1以上のシリンダを含む第2のシリンダ機構と、第1のシリンダ機構の1以上のロッドと第2のシリンダ機構の1以上のロッドを共通仮想中心線CLに沿って直線移動可能に連結する連結部と、支持部と装着部との間に配置されて、フローティング状態において、支持部に対して装着部が共通仮想中心線CLと平行な平行線PLに沿ってスライドすることを許容するスライド機構と、第1のシリンダ機構及び第2のシリンダ機構と流体駆動源との間に配置されて、フローティング状態とロック状態を選択的に形成する流体圧回路を備えている。なお保持部は、少なくとも一対の保持用のツメを備えた機械的な構造を有する把持部でもよいし、吸着パッドを備えた吸着部のいずれでもよい。
【0009】
本発明によれば、コンプライアンス機構の第1及び第2のシリンダ機構に流体圧回路から高圧流体を供給して最初にロック状態にすると、保持部が装着された装着部は支持部に対する原点位置に必ず復帰する。言い換えれば、ワークを保持して搬送する前に、常に装着部に装着された保持部を支持部に対する原点に戻して位置制御することができる。その結果、保持部の位置制御が正確になる。そして保持部でワークを保持する際には、流体圧回路から供給する流体圧の制御によりコンプライアンス機構をフローティング状態にすれば、ワークに倣って保持部が移動することにより保持部を装着した装着部はスムースに移動する。その結果、保持部はワークを保持するのに適した位置で、ワークを正確に保持することが可能になる。
【0010】
保持部がワークを保持した後にワークの搬送をする際に、流体圧回路によりコンプライアンス機構をロック状態にして、支持部を移動させると、ワークを保持した保持部が装着された装着部の支持部に対する位置が変わることがない。よってワークに必要以上の振動が加わることがなく、確実にワークを保持して、搬送することができる。このように本発明によれば、シリンダ機構を用いてフローティング状態とロック状態を、簡単な構造で確実に形成することができるコンプライアンス機構を備えた保持装置を提供することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エビス
連結具
1か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社ダイヘン
搬送装置
2か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボット
1か月前
株式会社マキタ
ハンマドリル
1か月前
学校法人立命館
ロボットハンド
2か月前
CKD株式会社
吸着型搬送装置
7日前
川崎重工業株式会社
塗装ロボット
14日前
ジヤトコ株式会社
圧入装置
6日前
長堀工業株式会社
締結装置
23日前
株式会社安川電機
ロボット
10日前
株式会社安川電機
ロボット
10日前
株式会社安川電機
ロボット
10日前
株式会社アイエイアイ
グリッパー
2か月前
株式会社不二越
ロボットの操作装置
1か月前
株式会社山下工業研究所
ラチェットレンチ
1か月前
株式会社アマダ
磁気吸着装置
13日前
株式会社不二越
協働ロボットシステム
2か月前
工機ホールディングス株式会社
作業機
13日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
13日前
株式会社マキタ
電動作業機
2か月前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
22日前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
22日前
ムラテックメカトロニクス株式会社
吸着ハンド
2か月前
工機ホールディングス株式会社
電気機器
1か月前
モトコマ株式会社
バールとその製造方法
2か月前
株式会社ミマキエンジニアリング
印刷システム
22日前
個人
ターンバックル用工具
今日
トヨタ自動車株式会社
経路決定システム及び方法
14日前
セイコーエプソン株式会社
検査方法
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ