TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024158764
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023074271
出願日
2023-04-28
発明の名称
検査方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20241031BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】第1コネクタの位置を精度よく検出することができる検査方法を提供する。
【解決手段】ロボットを用いて第1コネクタを第2コネクタに挿入する動作を含む検査を行う検査方法であって、前記第1コネクタを前記第2コネクタに挿入する方向に沿って並ぶ複数の認識マークの位置を画像認識で検出して、前記第1コネクタの位置を検出する位置検出ステップと、前記ロボットで前記第1コネクタを把持し、前記第2コネクタに対して前記第1コネクタの抜き挿しを行う挿抜ステップと、を含む。
【選択図】図8
特許請求の範囲
【請求項1】
ロボットを用いて第1コネクタを第2コネクタに挿入する動作を含む検査を行う検査方法であって、
前記第1コネクタを前記第2コネクタに挿入する方向に沿って並ぶ複数の認識マークの位置を画像認識で検出して、前記第1コネクタの位置を検出する位置検出ステップと、
前記ロボットで前記第1コネクタを把持し、前記第2コネクタに対して前記第1コネクタの抜き挿しを行う挿抜ステップと、を含むことを特徴とする検査方法。
続きを表示(約 930 文字)
【請求項2】
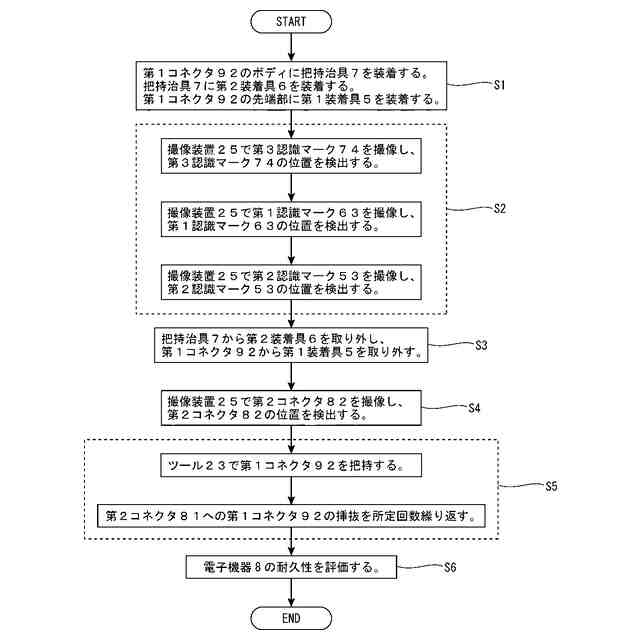
前記第1コネクタは、前記ロボットに把持される把持部を備える把持治具に、先端部を露出して装着され、
前記第1コネクタの前記先端部に第1装着具を装着し、
前記複数の認識マークは、前記把持部に配置されている第1認識マークと、前記第1装着具に配置されている第2認識マークと、を有する請求項1に記載の検査方法。
【請求項3】
前記第1認識マークは、前記把持治具に対して着脱できる請求項2に記載の検査方法。
【請求項4】
前記複数の認識マークは、前記把持治具に配置され、前記第1認識マークと前記第2認識マークとの間に位置する第3認識マークを有する請求項3に記載の検査方法。
【請求項5】
前記位置検出ステップでは、前記第3認識マークと前記第1認識マークとの位置関係および前記第3認識マークと前記第2認識マークとの位置関係を検出し、
前記挿抜ステップでは、前記第3認識マークの位置と、前記第3認識マークと前記第1認識マークとの位置関係と、前記第1認識マークと前記把持部との位置関係と、に基づいて前記把持部の位置を検出し、検出結果に基づいて前記ロボットを動かして前記把持部を把持する請求項4に記載の検査方法。
【請求項6】
前記挿抜ステップでは、前記第3認識マークの位置と、前記第3認識マークと前記第2認識マークとの位置関係と、前記第2認識マークと前記第1コネクタの先端との位置関係と、に基づいて前記第1コネクタの先端の位置を検出し、検出結果に基づいて前記第2コネクタに対する前記第1コネクタの挿抜を行う請求項5に記載の検査方法。
【請求項7】
前記位置検出ステップと前記挿抜ステップとの間に行われ、
前記第1コネクタから前記第1装着具を取り外し、前記把持治具から前記第1認識マークを取り外す取り外しステップを含む請求項3に記載の検査方法。
【請求項8】
前記認識マークは、立体形状である請求項1に記載の検査方法。
【請求項9】
前記認識マークの側面は、テーパー状に傾斜している請求項8に記載の検査方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、検査方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、ロボットで第1コネクタを把持して第2コネクタに挿入するステップと、第1コネクタが第2コネクタに挿入されている状態で第1コネクタおよび第2コネクタを共振させるステップと、共振周波数に基づいて第1コネクタの挿入深さを調整するステップと、を行うロボット装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-012784号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のロボット装置では、第1コネクタの検出位置と実際位置とにずれがあると、第2コネクタへの第1コネクタの挿入成功確率が低下したり、挿入に要する時間が長くなってタクトタイムが低下したりする。
【課題を解決するための手段】
【0005】
本発明の検査方法は、ロボットを用いて第1コネクタを第2コネクタに挿入する動作を含む検査を行う検査方法であって、
前記第1コネクタを前記第2コネクタに挿入する方向に沿って並ぶ複数の認識マークの位置を画像認識で検出して、前記第1コネクタの位置を検出する位置検出ステップと、
前記ロボットで前記第1コネクタを把持し、前記第2コネクタに対して前記第1コネクタの抜き挿しを行う挿抜ステップと、を含む。
【図面の簡単な説明】
【0006】
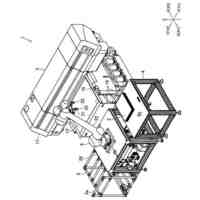
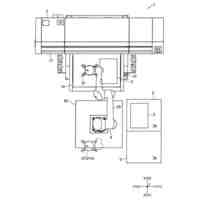
第1実施形態に係るロボットシステムの構成図である。
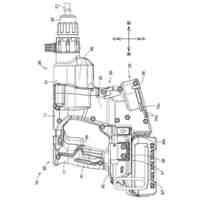
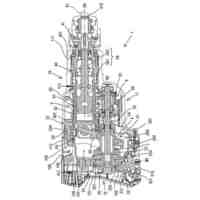
検査で用いるケーブルを示す平面図である。
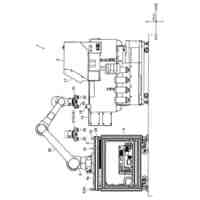
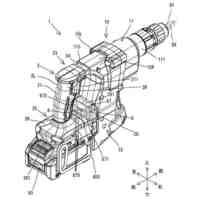
電子機器を背面から見た図である。
把持治具、第1装着具および第2装着具を示す斜視図である。
把持治具、第1装着具および第2装着具を示す斜視図である。
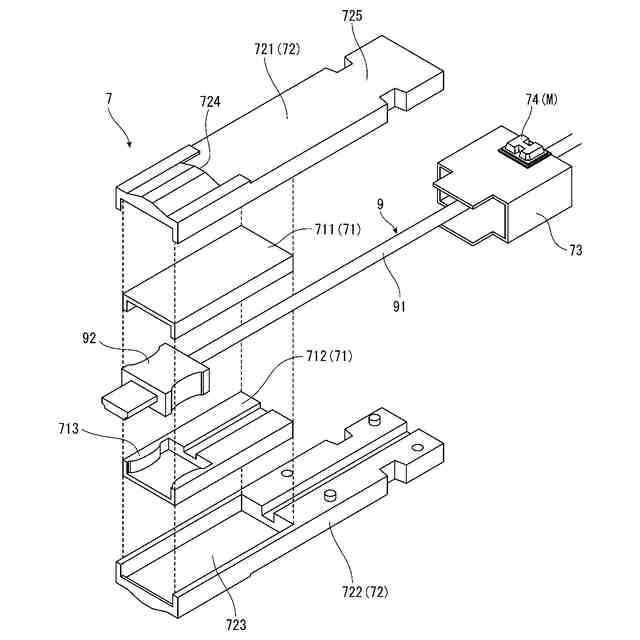
把持治具の分解斜視図である。
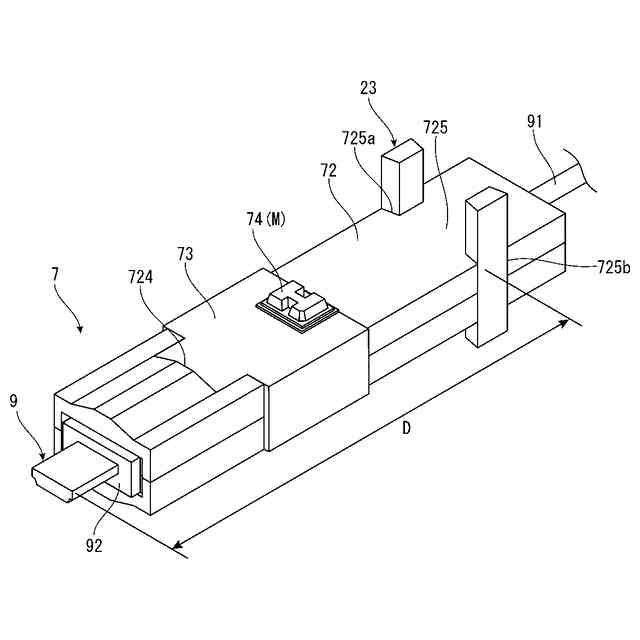
ツールが把持治具を把持した様子を示す斜視図である。
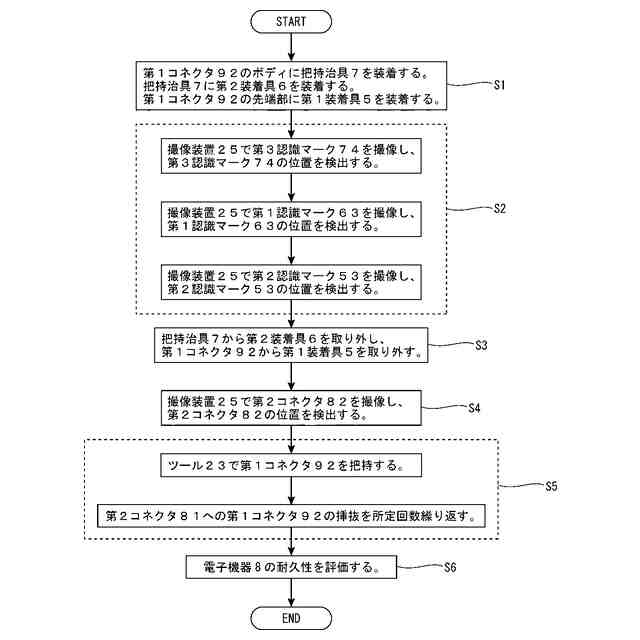
検査工程を示すフローチャートである。
第2実施形態に係るロボットシステムの構成図である。
第3実施形態に係る検査で用いるケーブルの平面図である。
【発明を実施するための形態】
【0007】
以下、本発明の検査方法を添付図面に示す実施形態に基づいて詳細に説明する。
【0008】
<第1実施形態>
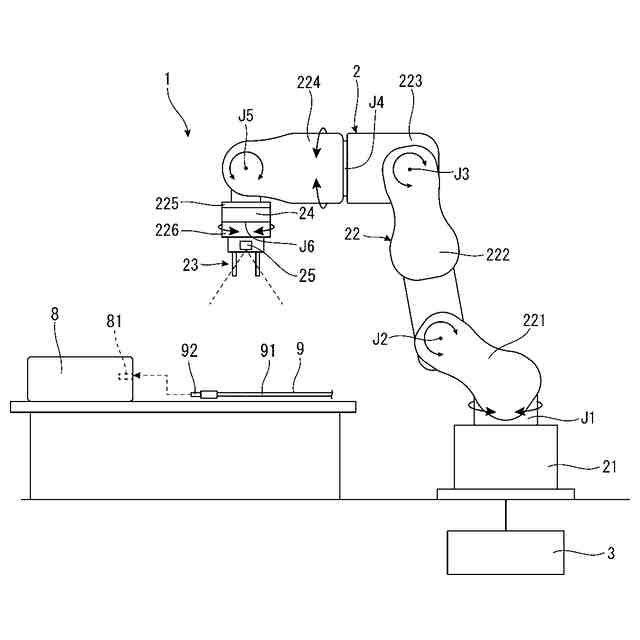
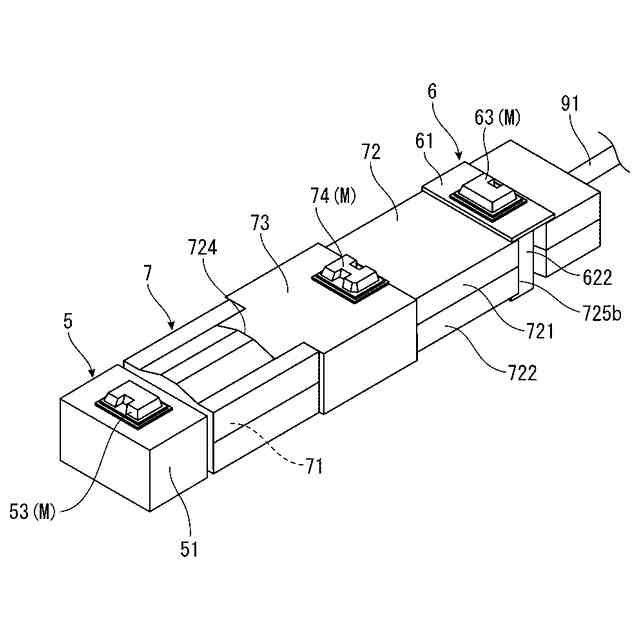
図1は、第1実施形態に係るロボットシステムの構成図である。図2は、検査で用いるケーブルを示す平面図である。図3は、電子機器を背面から見た図である。図4および図5は、それぞれ、把持治具、第1装着具および第2装着具を示す斜視図である。図6は、把持治具の分解斜視図である。図7は、ツールが把持治具を把持した様子を示す斜視図である。図8は、検査工程を示すフローチャートである。
【0009】
図1に示すロボットシステム1は、把持したケーブル9を電子機器8に挿抜するロボット2と、ロボット2の駆動を制御する制御装置3と、を有する。
【0010】
ロボット2は、6つの駆動軸を有する6軸垂直多関節ロボットである。このようなロボット2は、ベース21と、ベース21に回動自在に連結されたロボットアーム22と、ロボットアーム22の先端に装着されたツール23と、ロボットアーム22とツール23との間に配置された力検出部としての力覚センサー24と、ツール23に配置された撮像装置25と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
11日前
株式会社マキタ
電動工具
19日前
株式会社マキタ
電動工具
4日前
川崎重工業株式会社
ロボットリスト
19日前
川崎重工業株式会社
ロボットアーム
19日前
川崎重工業株式会社
ロボットアーム
19日前
日本車輌製造株式会社
締め付け工具
19日前
川崎重工業株式会社
ロボットシステム
19日前
CKD株式会社
吸着型搬送装置
1か月前
日本信号株式会社
作業機制御システム
4日前
川崎重工業株式会社
塗装ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
株式会社京阪エンジニアリング
脱着装置
5日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社スター精機
ワーク搬送装置
8日前
株式会社マキタ
集塵アタッチメント
4日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
19日前
工機ホールディングス株式会社
作業機
1か月前
モトコマ株式会社
寄せポンチホルダー
20日前
川崎重工業株式会社
ロボットシステム
11日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社DailyColor
ロボットハンド
20日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
有限会社松尾エンジニアリング
連結部材
20日前
個人
ターンバックル用工具
26日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
25日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ