TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025010848
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2023113109
出願日
2023-07-10
発明の名称
エレベータ制御装置、エレベータ制御システムおよびエレベータ制御方法
出願人
東芝エレベータ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B66B
5/02 20060101AFI20250116BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】非常事態時に実行される管制運転において、自律移動体が作業等の妨げとなることを防止し、かつ自律移動体の転倒による損壊を防止すること。
【解決手段】実施形態のエレベータ制御装置は、乗りかごに、自律的に移動可能な自律移動体が乗車可能なエレベータを制御するエレベータ制御装置であって、非常事態の発生が検知された場合に、前記乗りかごに乗車中の前記自律移動体に予め定められた動作を実行させるための制御を行い、前記乗りかごに対して前記非常事態に対応する管制運転を実行する制御部、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
乗りかごに、自律的に移動可能な自律移動体が乗車可能なエレベータを制御するエレベータ制御装置であって、
非常事態の発生が検知された場合に、前記乗りかごに乗車中の前記自律移動体に予め定められた動作を実行させるための制御を行い、前記乗りかごに対して前記非常事態に対応する管制運転を実行する制御部、
を備えるエレベータ制御装置。
続きを表示(約 1,700 文字)
【請求項2】
前記エレベータ制御装置は、前記自律移動体を制御し、前記乗りかごの昇降を制御する昇降機用サーバとネットワークに接続され、前記昇降機用サーバは、前記非常事態が発生した場合に、前記乗りかごの前記非常事態に対応した特定プログラムを前記自律移動体に送信する自律移動体用サーバにネットワークに接続され、
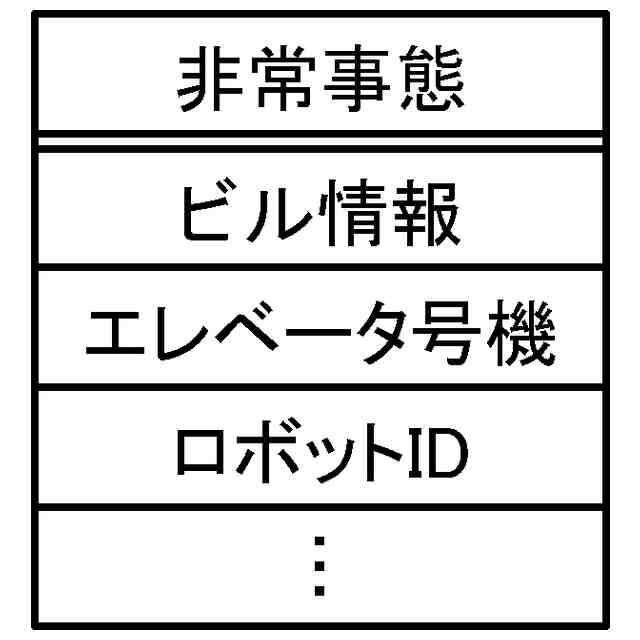
前記制御部は、前記非常事態が発生した場合に、前記乗りかごに乗車中の前記自律移動体に予め定められた動作を実行させるための制御として、前記昇降機用サーバに対して、前記非常事態が発生した旨の通知を送信する、
請求項1に記載のエレベータ制御装置。
【請求項3】
前記非常事態は、火災または地震である、
請求項2に記載のエレベータ制御装置。
【請求項4】
火災用の前記特定プログラムは、前記予め定められた動作として、前記自律移動体を前記乗りかごの四隅のいずれかの隅に移動することが定められている、
請求項3に記載のエレベータ制御装置。
【請求項5】
地震用の前記特定プログラムは、前記予め定められた動作として、前記自律移動体を前記乗りかごの壁際に移動することが定められている、
請求項3に記載のエレベータ制御装置。
【請求項6】
エレベータの乗りかごを制御するエレベータ制御装置と、前記乗りかごに乗車可能で自律的に移動可能な自律移動体と、前記エレベータ制御装置とネットワークで接続され、前記乗りかごの昇降を制御する昇降機用サーバと、前記自律移動体と前記昇降機用サーバとにネットワークで接続される自律移動体用サーバと、を備えるエレベータ制御システムであって、
前記エレベータ制御装置は、
非常事態の発生が検知された場合に、前記乗りかごに対して、前記非常事態に応じた管制運転を制御し、前記非常事態が発生した場合に、前記非常事態の発生の通知を、前記昇降機用サーバに送信する制御部と、を備え、
前記昇降機用サーバは、
前記エレベータ制御装置から前記非常事態の発生の通知を受信した場合に、前記自律移動体用サーバに、前記非常事態に対応した前記自律移動体の動作が定められた特定プログラムの前記自律移動体への送信要求を送信する第2の制御部、を備え、
前記自律移動体用サーバは、
前記昇降機用サーバから、前記送信要求を受信した場合に、前記乗りかごの自律移動体に、前記非常事態に対応する前記特定プログラムを送信する第3の制御部、を備え、
前記乗りかごに乗車中の自律移動体は、
前記自律移動体用サーバから、前記特定プログラムを受信し、受信した前記特定プログラムを実行することにより、前記特定プログラム定められた動作を実行する第4の制御部、
を備えるエレベータ制御システム。
【請求項7】
前記非常事態は、火災または地震である、
請求項6に記載のエレベータ制御システム。
【請求項8】
火災用の前記特定プログラムは、予め定められた動作として、前記自律移動体を前記乗りかごの四隅に移動することが定められている、
請求項7に記載のエレベータ制御システム。
【請求項9】
地震用の前記特定プログラムは、予め定められた動作として、前記自律移動体を前記乗りかごの壁際に移動することが定められている、
請求項8に記載のエレベータ制御システム。
【請求項10】
乗りかごに自律的に移動可能な自律移動体が乗車可能なエレベータを制御するエレベータ制御装置で実行されるエレベータ制御方法あって、
非常事態の発生を検知するステップと、
非常事態が発生した場合に、前記乗りかごに乗車中の前記自律移動体に予め定められた動作を実行させるための制御を行い、前記乗りかごに対して前記非常事態に対応する管制運転を実行するステップと、
を含むエレベータ制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、エレベータ制御装置、エレベータ制御システムおよびエレベータ制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年のエレベータシステムにおいては、ロボット等の自律移動体をエレベータの乗りかごに乗せて各種作業を実行させている。ここで、非常用のエレベータは、非常事態としての火災時においても消火活動のため消防士がエレベータを利用可能でなければならない。このため、自律移動体が非常用エレベータを利用中に火災が発生した場合、非常用エレベータの乗りかごは、所定の基準階(例えば、1階等)に引き戻す運転である火災管制運転が行われ、乗りかご内に利用者がいない状態で消防活動が行われる。
【0003】
また、非常事態としての地震が発生した場合には、安全上の観点から利用者を乗りかご内から降車させるため、乗りかごを直ちに最寄階に着床させる地震管制運転が行われる。
【先行技術文献】
【特許文献】
【0004】
国際公開2021/124405号
特許第5787806号公報
特許第7081704号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、火災管制運転の場合において、乗りかご内に自律移動体がいる状態のまままでは、消防士の乗降や活動が妨げられるおそれがある。また、地震管制運転の場合には、自律移動体が乗りかごから降車するタイミングで、余震が発生した場合、自律移動体が転倒して損壊してしまうおそれがある。
【0006】
本実施形態の課題の一つは、非常事態時に実行される管制運転において、自律移動体が作業等の妨げとなることを防止し、かつ自律移動体の転倒による損壊を防止することができるエレベータ制御装置、エレベータ制御システムおよびエレベータ制御方法を提供することである。
【課題を解決するための手段】
【0007】
実施形態のエレベータ制御装置は、乗りかごに、自律的に移動可能な自律移動体が乗車可能なエレベータを制御するエレベータ制御装置であって、非常事態の発生が検知された場合に、前記乗りかごに乗車中の前記自律移動体に予め定められた動作を実行させるための制御を行い、前記乗りかごに対して前記非常事態に対応する管制運転を実行する制御部、を備える。
【図面の簡単な説明】
【0008】
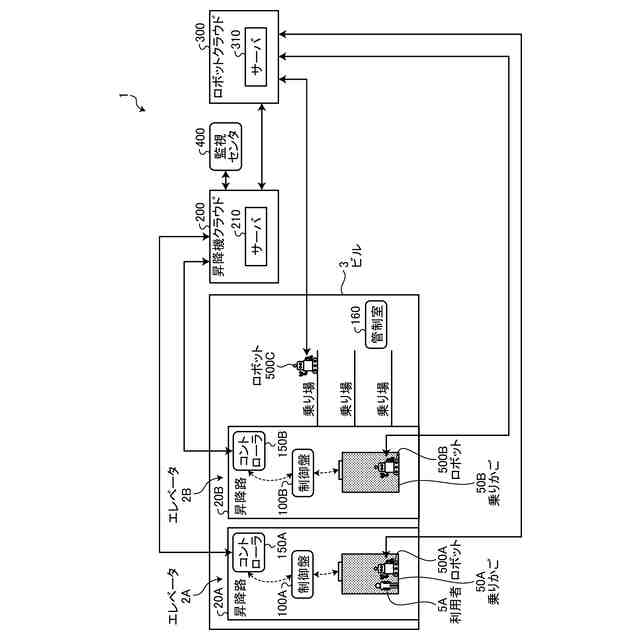
図1は、実施形態にかかるエレベータ制御システムの全体構成の一例を示す図である。
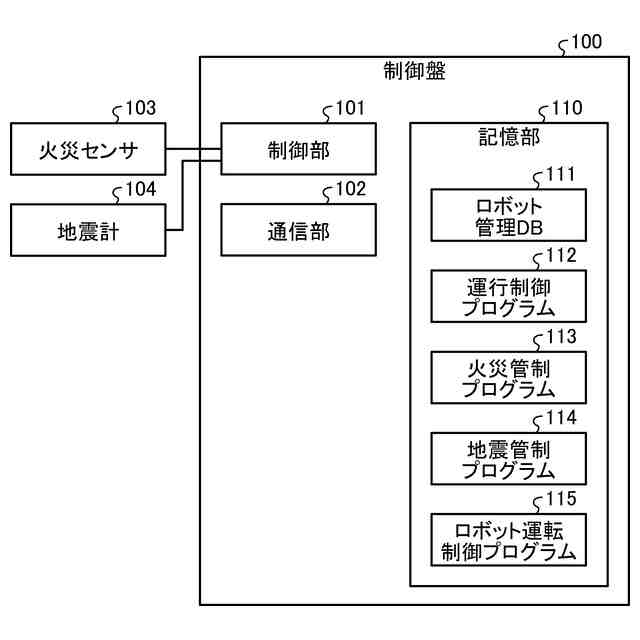
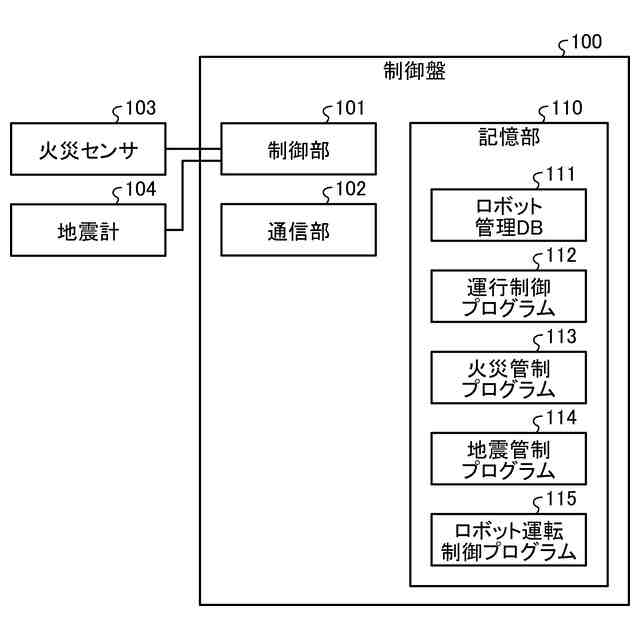
図2は、実施形態にかかる制御盤の機能的構成の一例を示すブロック図である。
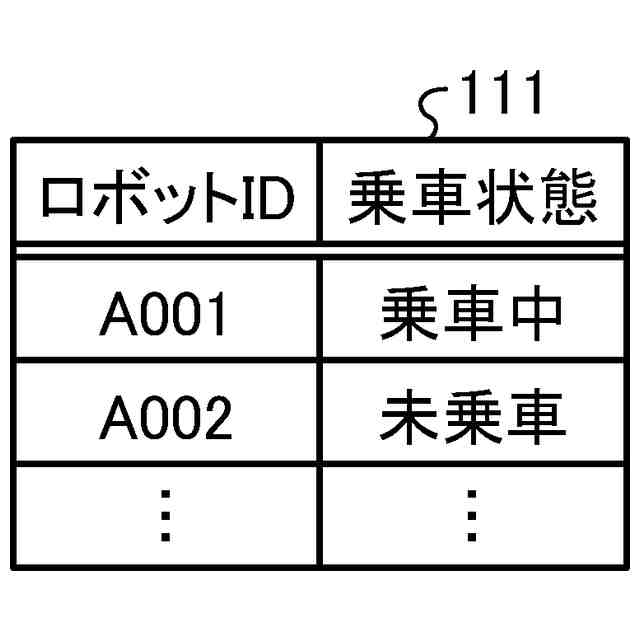
図3は、実施形態にかかるロボット管理DBのデータ構造の一例を示す図である。
図4は、実施形態にかかる火災または地震が発生した旨の通知の一例を示す図である。
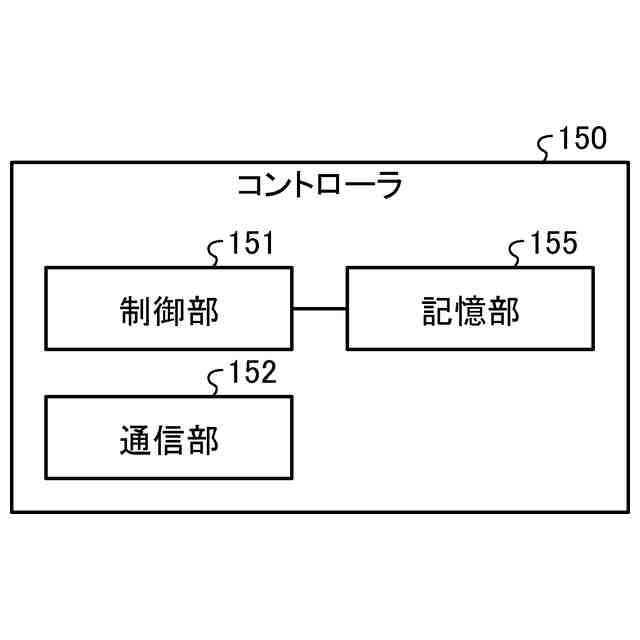
図5は、実施形態にかかるコントローラの機能的構成の一例を示すブロック図である。
図6は、実施形態にかかる昇降機クラウド内のサーバ210の機能的構成の一例を示すブロック図である。
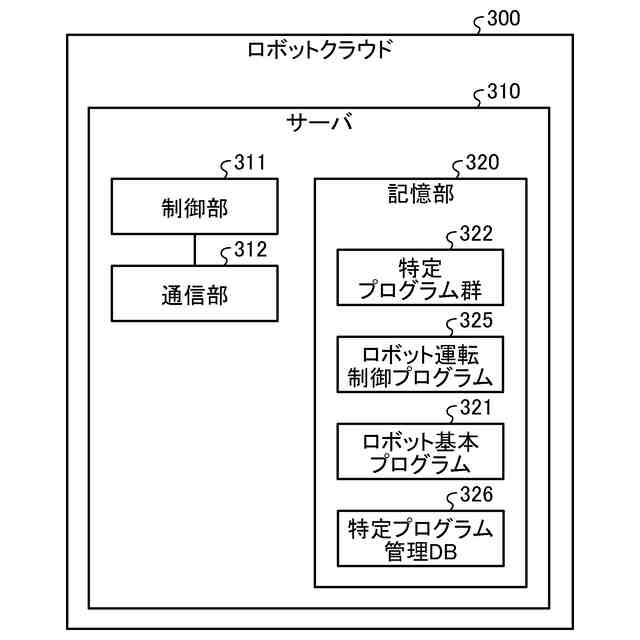
図7は、実施形態にかかるロボットクラウド内のサーバ310の機能的構成の一例を示すブロック図である。
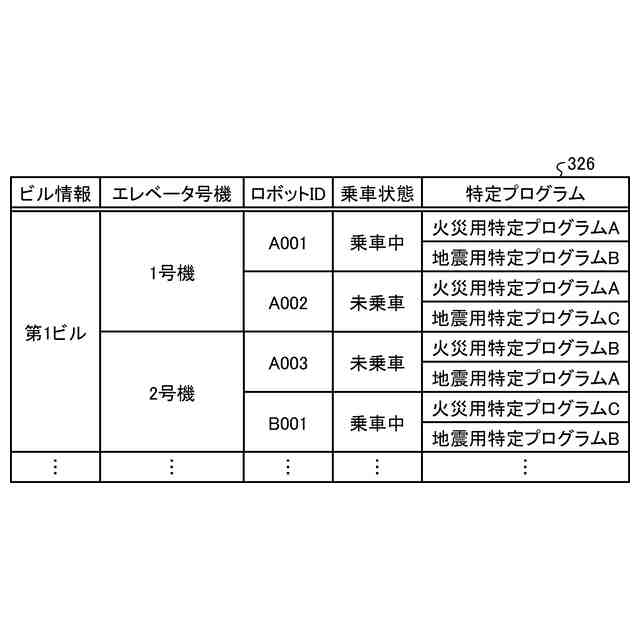
図8は、実施形態にかかる特定プログラム管理DBのデータ構造の一例を示す図である。
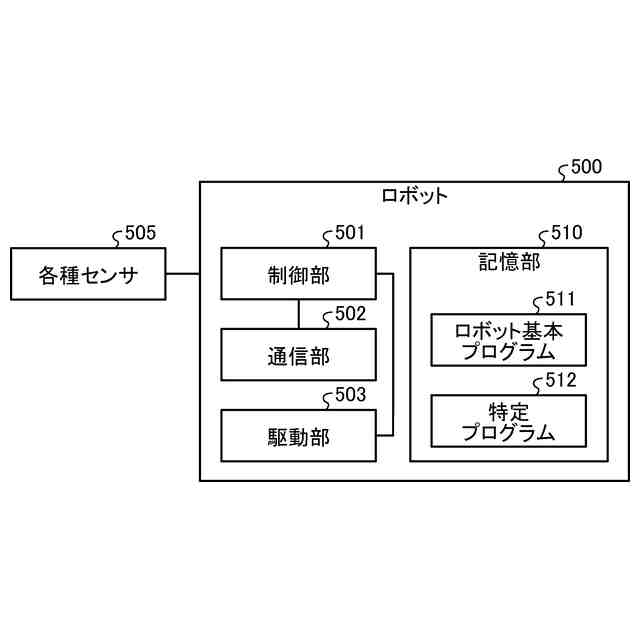
図9は、実施形態にかかるロボットの機能的構成の一例を示すブロック図である。
図10は、実施形態にかかるエレベータ制御処理の手順の一例を示すシーケンス図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して実施形態について説明する。
(実施形態)
図1は、本実施形態にかかるエレベータ制御システム1の全体構成の一例を示す図である。本実施形態のエレベータ制御システム1は、図1に示すように、エレベータ2A,2Bごとに設けられる制御盤100A,100Bと、エレベータ2A,2Bごとに設けられるコントローラ150A、150Bと、管制室160と、昇降機クラウド200内のサーバ210と、ロボットクラウド300内のサーバ310と、監視センタ400と、を主に備えている。
【0010】
本実施形態では、オフィスビルやマンションビル等のビル3に、二つのエレベータ2A、2Bが設置されている。エレベータ2A,2Bのそれぞれは、各昇降路20A,20B内に乗りかご50A,50Bを備える。この他、各昇降路20A,20B内には、不図示の巻上機およびカウンターウェイトを備える。乗りかご50A,50Bとカウンターウェイトは、それぞれに昇降路20A,20B内に立設された不図示の一対のガイドレールに昇降自在に支持されており、ロープを介して昇降動作する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
5か月前
ユニパルス株式会社
吊具
7か月前
ユニパルス株式会社
吊具
11か月前
ユニパルス株式会社
吊具
12か月前
個人
海上コンテナ昇降装置
1か月前
ユニパルス株式会社
荷役装置
26日前
ユニパルス株式会社
吊具装置
2か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
1か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
荷役車両
11日前
株式会社日本キャリア工業
昇降機
5か月前
ユニパルス株式会社
荷役助力装置
9か月前
株式会社北川鉄工所
吊荷制御方法
10か月前
個人
建築部材の吊り上げ装置
3か月前
フジテック株式会社
エレベータ
11か月前
株式会社豊田自動織機
フォークリフト
6か月前
株式会社大林組
養生方法
4か月前
大同特殊鋼株式会社
治具
10か月前
株式会社ニシキ
可変型吊り天秤
8か月前
フジテック株式会社
エレベータ
18日前
ブラザー工業株式会社
架台
7か月前
小野谷機工株式会社
ジャッキ装置
7か月前
白山工業株式会社
腕重量補償機構
3か月前
株式会社タダノ
高所作業車
3か月前
ウエダ産業株式会社
鋼板保持装置
6か月前
有限会社サエキ
玉掛用器具
1か月前
フジテック株式会社
乗客搬送装置
12か月前
株式会社キトー
吊具
4か月前
ブラザー工業株式会社
架台
7か月前
株式会社スギヤス
車両整備用リフト
2か月前
株式会社スギヤス
車両整備用リフト
2か月前
株式会社スギヤス
車両整備用リフト
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ