TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002577
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023102854
出願日
2023-06-22
発明の名称
制御設計装置、方法、及びプログラム
出願人
日本製鉄株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B61F
5/22 20060101AFI20241226BHJP(鉄道)
要約
【課題】鉄道車両の車体の傾斜角を目標角へ追従させるように空気ばねへの給排気を制御するコントローラを設計する際に用いる車体運動モデルのパラメータを精度よく同定する。
【解決手段】制御設計装置は、複数の給排気条件の各々について、左右の何れか一方の空気ばねへ給排気条件で一定の給排気を行う給排気指令を給排気装置に入力したときの、車体の運動を表す時系列波形を取得する波形取得部と、複数の給排気条件のうち、最も悪い給排気条件について、取得された時系列波形と給排気指令との組み合わせに基づいて推定される、伝達関数についての周波数伝達特性と、鉄道車両の車体の運動をモデル化した車体運動モデルの周波数伝達特性と、が対応するように同定された、車体運動モデルのパラメータを取得するモデルパラメータ取得部と、取得されたパラメータを有する車体運動モデルを用いて、コントローラを設計する制御設計部と、を含む。
【選択図】図5
特許請求の範囲
【請求項1】
車体を台車の上に支持する左右の空気ばねを有する鉄道車両の前記車体の傾斜角を目標角へ追従させる制御指令を出力する制御装置を設計するための制御設計装置であって、
複数の給排気条件の各々について、前記制御指令として前記空気ばねへの給排気指令であって、左右の何れか一方の前記空気ばねへ前記給排気条件で一定の給排気を行う給排気指令を給排気装置に入力したときの、前記車体の運動を表す時系列波形を取得する波形取得部と、
前記複数の給排気条件のうち、車体の傾斜又は運動に関する値が最も悪い給排気条件について、前記波形取得部によって取得された前記時系列波形と前記給排気指令との組み合わせに基づいて推定される、前記給排気指令を入力とし、前記時系列波形を出力する伝達関数についての周波数伝達特性と、前記鉄道車両の前記車体の運動をモデル化した車体運動モデルの前記周波数伝達特性と、が対応するように同定された、前記車体運動モデルのパラメータを取得するモデルパラメータ取得部と、
前記取得されたパラメータを有する前記車体運動モデルを用いて、前記制御装置が前記制御指令を計算する際に用いるコントローラを設計する制御設計部と、
を含む制御設計装置。
続きを表示(約 2,800 文字)
【請求項2】
前記モデルパラメータ取得部は、
前記波形取得部によって取得された前記時系列波形に基づいて、前記複数の給排気条件のうち、車体の傾斜又は運動に関する値が最も悪い給排気条件を選択する選択部と、
前記選択された給排気条件について、前記波形取得部によって取得された前記時系列波形と前記給排気指令との組み合わせに基づいて、前記伝達関数を推定する伝達関数推定部と、
前記選択された給排気条件について、前記推定された伝達関数についての周波数伝達特性を計算する周波数伝達特性計算部と、
前記選択された給排気条件について、前記鉄道車両の前記車体の運動をモデル化した車体運動モデルの前記周波数伝達特性と、前記計算された前記周波数伝達特性とが対応するように、前記車体運動モデルのパラメータを同定するモデルパラメータ同定部と、
を含む請求項1記載の制御設計装置。
【請求項3】
前記モデルパラメータ取得部は、
前記複数の給排気条件の各々について、前記波形取得部によって取得された前記時系列波形と前記給排気指令との組み合わせに基づいて、前記伝達関数を推定する伝達関数推定部と、
前記複数の給排気条件の各々について、前記推定された伝達関数についての周波数伝達特性を計算する周波数伝達特性計算部と、
前記計算された前記周波数伝達特性に基づいて、前記複数の給排気条件のうち、車体の傾斜又は運動に関する値が最も悪い給排気条件を選択する選択部と、
前記選択された給排気条件について、前記鉄道車両の前記車体の運動をモデル化した車体運動モデルの前記周波数伝達特性と、前記計算された前記周波数伝達特性とが対応するように、前記車体運動モデルのパラメータを同定するモデルパラメータ同定部と、
を含む請求項1記載の制御設計装置。
【請求項4】
前記モデルパラメータ取得部は、
前記複数の給排気条件の各々について、前記波形取得部によって取得された前記時系列波形と前記給排気指令との組み合わせに基づいて、前記伝達関数を推定する伝達関数推定部と、
前記複数の給排気条件の各々について、前記推定された伝達関数についての周波数伝達特性を計算する周波数伝達特性計算部と、
前記複数の給排気条件の各々について、前記鉄道車両の前記車体の運動をモデル化した車体運動モデルの前記周波数伝達特性と、前記計算された前記周波数伝達特性とが対応するように、前記車体運動モデルのパラメータを同定するモデルパラメータ同定部と、
前記同定された前記車体運動モデルのパラメータに基づいて、前記複数の給排気条件のうち、車体の傾斜又は運動に関する値が最も悪い給排気条件を選択する選択部と、
を含む請求項1記載の制御設計装置。
【請求項5】
前記選択部は、前記波形取得部によって取得された前記時系列波形に基づいて、オーバーシュート率が最大となる給排気条件を選択する請求項2記載の制御設計装置。
【請求項6】
前記鉄道車両は、前記空気ばねへの給気を制御するための複数の電磁弁と、前記空気ばねの排気を制御するための複数の電磁弁と、を有し、
前記給排気指令は、前記複数の電磁弁の各々の開閉を制御するためのものであり、
前記給排気条件は、開閉する電磁弁の種類又は個数に関するものである請求項1~請求項5の何れか1項記載の制御設計装置。
【請求項7】
前記時系列波形は、前記車体の傾斜角の変化及び前記車体の左右加速度の変化を表し、
前記伝達関数を推定する際には、前記給排気指令を入力とし、前記車体の傾斜角の変化を出力する伝達関数と、前記給排気指令を入力とし、前記車体の左右加速度の変化を出力する伝達関数と、を推定し、
前記周波数伝達特性を計算する際には、前記車体の傾斜角の変化を出力する伝達関数についての周波数伝達特性、及び前記車体の左右加速度の変化を出力する伝達関数についての周波数伝達特性を計算する請求項1~請求項5の何れか1項記載の制御設計装置。
【請求項8】
車体を台車の上に支持する左右の空気ばねを有する鉄道車両の前記車体の傾斜角を目標角へ追従させる制御指令を出力する制御装置を設計するための制御設計装置における制御設計方法であって、
複数の給排気条件の各々について、前記制御指令として前記空気ばねへの給排気指令であって、左右の何れか一方の前記空気ばねへ前記給排気条件で一定の給排気を行う給排気指令を給排気装置に入力したときの、前記車体の運動を表す時系列波形を取得し、
前記複数の給排気条件のうち、車体の傾斜又は運動に関する値が最も悪い給排気条件について、前記取得された前記時系列波形と前記給排気指令との組み合わせに基づいて推定される、前記給排気指令を入力とし、前記時系列波形を出力する伝達関数についての周波数伝達特性と、前記鉄道車両の前記車体の運動をモデル化した車体運動モデルの前記周波数伝達特性と、が対応するように同定された、前記車体運動モデルのパラメータを取得し、
前記取得されたパラメータを有する前記車体運動モデルを用いて、前記制御装置が前記制御指令を計算する際に用いるコントローラを設計する
制御設計方法。
【請求項9】
車体を台車の上に支持する左右の空気ばねを有する鉄道車両の前記車体の傾斜角を目標角へ追従させる制御指令を出力する制御装置を設計するためのプログラムであって、
コンピュータを、
複数の給排気条件の各々について、前記制御指令として前記空気ばねへの給排気指令であって、左右の何れか一方の前記空気ばねへ前記給排気条件で一定の給排気を行う給排気指令を給排気装置に入力したときの、前記車体の運動を表す時系列波形を取得する波形取得部、
前記複数の給排気条件のうち、車体の傾斜又は運動に関する値が最も悪い給排気条件について、前記波形取得部によって取得された前記時系列波形と前記給排気指令との組み合わせに基づいて推定される、前記給排気指令を入力とし、前記時系列波形を出力する伝達関数についての周波数伝達特性と、前記鉄道車両の前記車体の運動をモデル化した車体運動モデルの前記周波数伝達特性と、が対応するように同定された、前記車体運動モデルのパラメータを取得するモデルパラメータ取得部、及び
前記取得されたパラメータを有する前記車体運動モデルを用いて、前記制御装置が前記制御指令を計算する際に用いるコントローラを設計する制御設計部
として機能させるための制御設計プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御設計装置、方法、及びプログラムに関する。特に、本発明は、鉄道車両のコントローラを設計するための制御設計装置、方法、及びプログラムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来より、車体傾斜制御装置の制御系に含まれるコントローラを設計するために必要な周波数特性を把握する方法が知られている(特許文献1、2)。
【先行技術文献】
【特許文献】
【0003】
特開2006-315519号公報
特開2009-40078号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、鉄道車両の車体の傾斜角を目標角へ追従させるように気体ばねへの給排気を制御するコントローラの設計において改善の余地がある。
【0005】
本発明は、上記の事情を考慮してなされたものであり、鉄道車両の車体の傾斜角を目標角へ追従させるように空気ばねへの給排気を制御するコントローラを設計する際に用いる車体運動モデルのパラメータを精度よく同定することができる制御設計装置、方法、及びプログラムを提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明に係る制御設計装置は、車体を台車の上に支持する左右の空気ばねを有する鉄道車両の前記車体の傾斜角を目標角へ追従させる制御指令を出力する制御装置を設計するための制御設計装置であって、複数の給排気条件の各々について、前記制御指令として前記空気ばねへの給排気指令であって、左右の何れか一方の前記空気ばねへ前記給排気条件で一定の給排気を行う給排気指令を給排気装置に入力したときの、前記車体の運動を表す時系列波形を取得する波形取得部と、前記複数の給排気条件のうち、車体の傾斜又は運動に関する値が最も悪い給排気条件について、前記波形取得部によって取得された前記時系列波形と前記給排気指令との組み合わせに基づいて推定される、前記給排気指令を入力とし、前記時系列波形を出力する伝達関数についての周波数伝達特性と、前記鉄道車両の前記車体の運動をモデル化した車体運動モデルの前記周波数伝達特性と、が対応するように同定された、前記車体運動モデルのパラメータを取得するモデルパラメータ取得部と、前記取得されたパラメータを有する前記車体運動モデルを用いて、前記制御装置が前記制御指令を計算する際に用いるコントローラを設計する制御設計部と、を含んで構成されている。
【0007】
本発明に係る制御設計方法は、車体を台車の上に支持する左右の空気ばねを有する鉄道車両の前記車体の傾斜角を目標角へ追従させる制御指令を出力する制御装置を設計するための制御設計装置における制御設計方法であって、複数の給排気条件の各々について、前記制御指令として前記空気ばねへの給排気指令であって、左右の何れか一方の前記空気ばねへ前記給排気条件で一定の給排気を行う給排気指令を給排気装置に入力したときの、前記車体の運動を表す時系列波形を取得し、前記複数の給排気条件のうち、車体の傾斜又は運動に関する値が最も悪い給排気条件について、前記取得された前記時系列波形と前記給排気指令との組み合わせに基づいて推定される、前記給排気指令を入力とし、前記時系列波形を出力する伝達関数についての周波数伝達特性と、前記鉄道車両の前記車体の運動をモデル化した車体運動モデルの前記周波数伝達特性と、が対応するように同定された、前記車体運動モデルのパラメータを取得し、前記取得されたパラメータを有する前記車体運動モデルを用いて、前記制御装置が前記制御指令を計算する際に用いるコントローラを設計する。
【0008】
本発明に係る制御設計プログラムは、車体を台車の上に支持する左右の空気ばねを有する鉄道車両の前記車体の傾斜角を目標角へ追従させる制御指令を出力する制御装置を設計するためのプログラムであって、コンピュータを、複数の給排気条件の各々について、前記制御指令として前記空気ばねへの給排気指令であって、左右の何れか一方の前記空気ばねへ前記給排気条件で一定の給排気を行う給排気指令を給排気装置に入力したときの、前記車体の運動を表す時系列波形を取得する波形取得部、前記複数の給排気条件のうち、車体の傾斜又は運動に関する値が最も悪い給排気条件について、前記波形取得部によって取得された前記時系列波形と前記給排気指令との組み合わせに基づいて推定される、前記給排気指令を入力とし、前記時系列波形を出力する伝達関数についての周波数伝達特性と、前記鉄道車両の前記車体の運動をモデル化した車体運動モデルの前記周波数伝達特性と、が対応するように同定された、前記車体運動モデルのパラメータを取得するモデルパラメータ取得部、及び前記取得されたパラメータを有する前記車体運動モデルを用いて、前記制御装置が前記制御指令を計算する際に用いるコントローラを設計する制御設計部として機能させるためのプログラムである。
【発明の効果】
【0009】
本発明の一態様である制御設計装置、方法、及びプログラムによれば、鉄道車両の車体の傾斜角を目標角へ追従させるように空気ばねへの給排気を制御するコントローラを設計する際に用いる車体運動モデルのパラメータを精度よく同定することができる。
【図面の簡単な説明】
【0010】
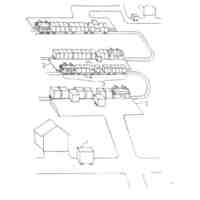
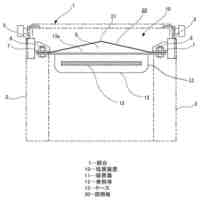
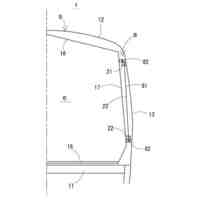
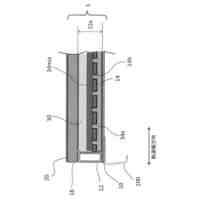
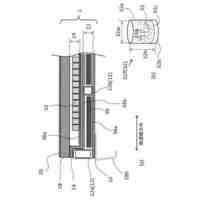
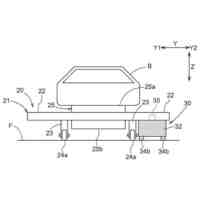
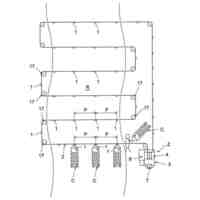
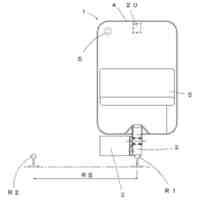
本発明の実施形態に係る鉄道車両の概略構成を示す模式図である。
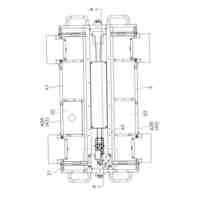
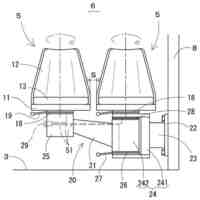
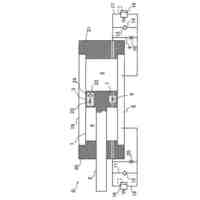
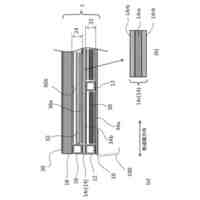
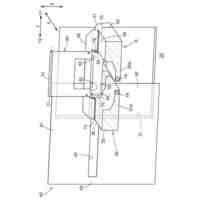
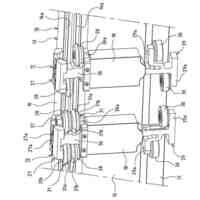
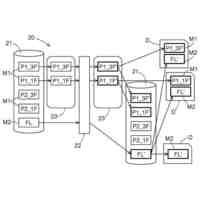
本発明の実施形態に係る鉄道車両の給排気装置の概略構成を示す模式図である。
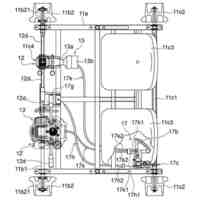
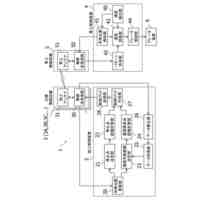
本発明の実施形態に係る鉄道車両の制御装置の概略構成を示す模式図である。
左右の空気ばねに対する給排気指令及び車体傾斜角の変化の一例を示す図である。
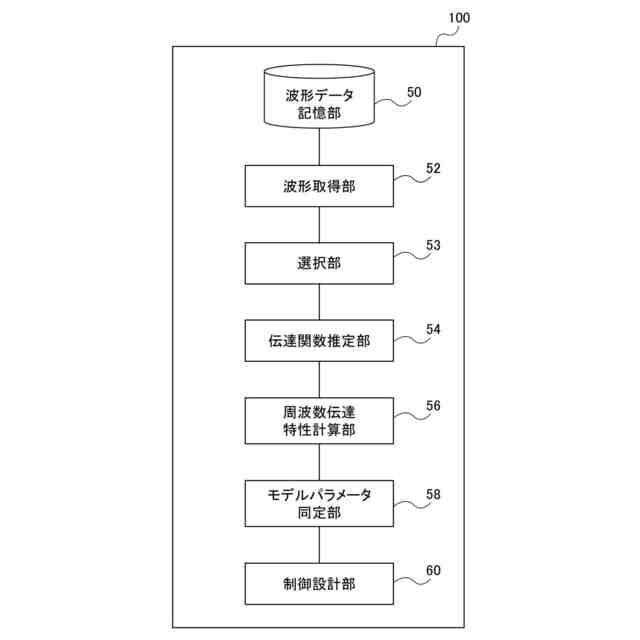
本発明の第1実施形態に係る制御設計装置の概略構成を示す模式図である。
伝達関数を推定する方法を説明するための図である。
車体運動モデルを説明するための図である。
車体運動モデルを説明するための図である。
車体運動モデルを説明するための図である。
車体運動モデルを説明するための図である。
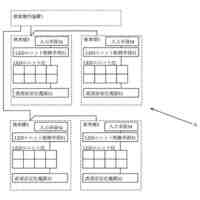
制御設計装置として機能するコンピュータの一例の概略ブロック図である。
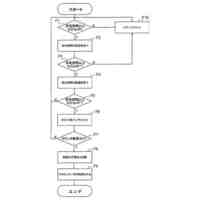
本発明の第1実施形態における制御設計処理の一例のフローチャートである。
本発明の第2実施形態に係る制御設計装置の概略構成を示す模式図である。
本発明の第2実施形態における制御設計処理の一例のフローチャートである。
本発明の第3実施形態に係る制御設計装置の概略構成を示す模式図である。
本発明の第3実施形態における制御設計処理の一例のフローチャートである。
実施例における給排気指令及び車体傾斜角の変化を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
コンテナ輸送システム
6か月前
東光産業株式会社
電動台車
7か月前
日本信号株式会社
検査装置
1か月前
コイト電工株式会社
暖房装置
6か月前
コイト電工株式会社
座席装置
7か月前
株式会社新陽社
発車標
5か月前
コイト電工株式会社
暖房装置
6か月前
日本車輌製造株式会社
鉄道車両
5か月前
日本車輌製造株式会社
鉄道車両
6か月前
富士電機株式会社
戸閉装置
9か月前
近畿車輌株式会社
鉄道車両の床構造
2か月前
川崎車両株式会社
鉄道車両用パネル
6日前
カヤバ株式会社
鉄道車両用制振装置
2か月前
株式会社ロッソ
移動体案内システム
9か月前
カヤバ株式会社
鉄道車両用制振装置
6か月前
保線機器整備株式会社
保線用カート
13日前
近畿車輌株式会社
鉄道車両の床構造
2か月前
近畿車輌株式会社
鉄道車両の床構造
2か月前
日本信号株式会社
踏切道監視システム
2か月前
株式会社日立製作所
鉄道車両
9か月前
シャープ株式会社
表示装置
3か月前
株式会社ダイフク
搬送設備
8か月前
前川鉄工株式会社
ロープ駆動装置
3か月前
株式会社ダイフク
搬送設備
5か月前
ナブテスコ株式会社
ホームドア装置
5か月前
日本信号株式会社
列車制御システム
7か月前
株式会社フジキカイ
リニア搬送装置
5か月前
株式会社 空スペース
跨座式モノレールシステム
1か月前
ナブテスコ株式会社
ホームドア装置
5か月前
日本車輌製造株式会社
長尺用無人搬送台車
4か月前
ナブテスコ株式会社
ホームドア装置
5か月前
ナブテスコ株式会社
ホームドア装置
4か月前
日本信号株式会社
信号システム及び信号灯器
27日前
株式会社ダイフク
搬送システム
4か月前
富士電機株式会社
制御装置、制御方法
6日前
株式会社ダイフク
走行規制装置
3か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ