TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025001957
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023101780
出願日
2023-06-21
発明の名称
先端部材接続方法およびコネクタ接続方法
出願人
倉敷紡績株式会社
代理人
個人
主分類
B25J
15/08 20060101AFI20241226BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】コネクタ等の先端部材を、相手方部材の挿入口の近隣に障害物が存在する場合でも接続可能な方法を提供する。
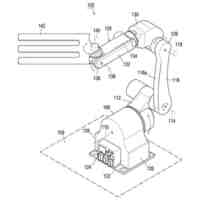
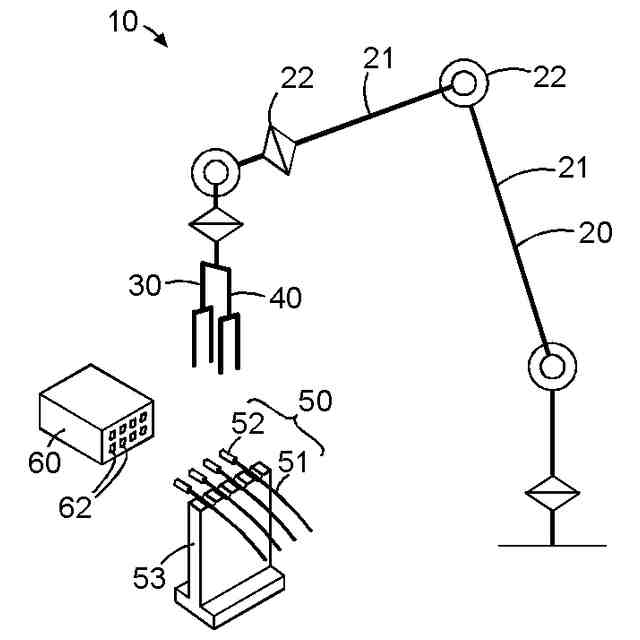
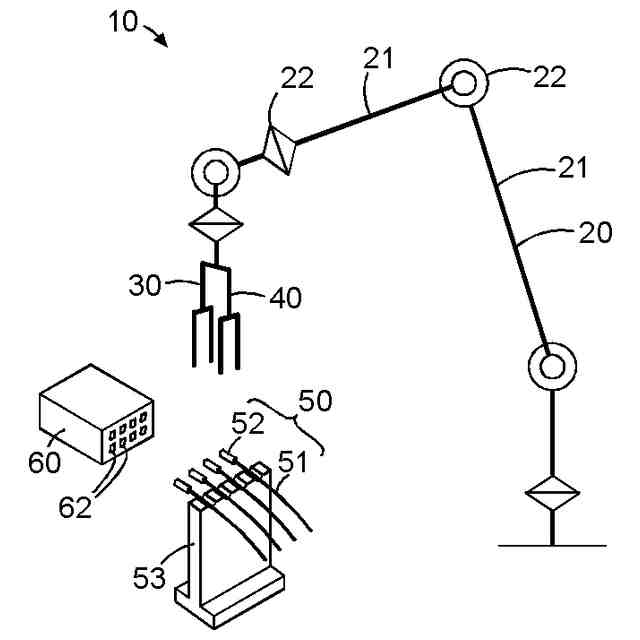
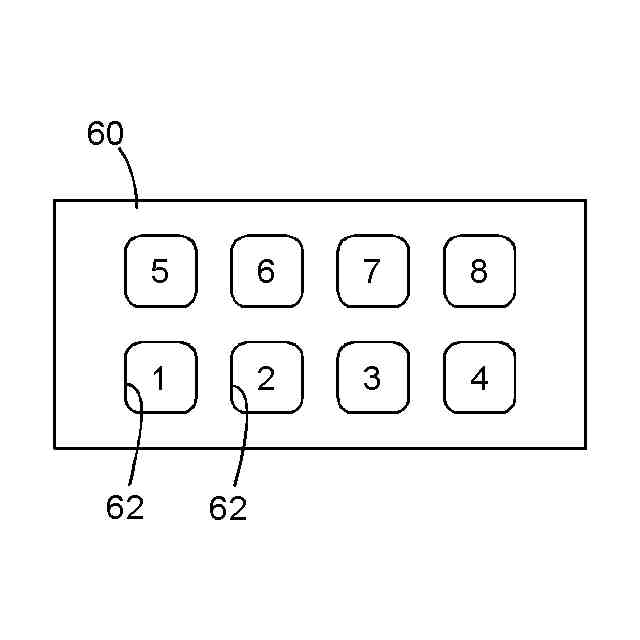
【解決手段】線状物本体51の先端に取り付けられた先端部材52を、近隣に障害物が存在する挿入口62を有する相手方部材60に接続するための方法であって、ロボット20に装着されたグリッパ30が有する、それぞれ独立して開閉可能な第1フィンガと第2フィンガで前記先端部材を把持する把持工程と、前記グリッパを移動させて、前記近隣に障害物が存在する挿入口に、前記第2フィンガを障害物側にして、前記先端部材の先端を挿入する挿入工程と、前記第1フィンガを開いて前記先端部材を解放する解放工程とを有する先端部材接続方法。
【選択図】図1
特許請求の範囲
【請求項1】
線状物本体の先端に取り付けられた先端部材を、近隣に障害物が存在する挿入口を有する相手方部材に接続するための方法であって、
ロボットに装着されたグリッパが有する、それぞれ独立して開閉可能な第1フィンガと第2フィンガで前記先端部材を把持する把持工程と、
前記グリッパを移動させて、前記近隣に障害物が存在する挿入口に、前記第2フィンガを障害物側にして、前記先端部材の先端を挿入する挿入工程と、
前記第1フィンガを開いて前記先端部材を解放する解放工程と、
を有する先端部材接続方法。
続きを表示(約 700 文字)
【請求項2】
請求項1において、前記先端部材がコネクタであり、前記相手方部材が相手方コネクタである、
コネクタ接続方法。
【請求項3】
線状物本体の先端に取り付けられたコネクタを複数の挿入口を有する相手方コネクタに接続するための方法であって、
ロボットに装着されたグリッパが有する、それぞれ独立して開閉可能な第1フィンガと第2フィンガで前記コネクタを把持する把持工程と、
前記グリッパを移動させて、前記相手方コネクタの前記複数の挿入口のうち、すでに他のコネクタが挿入された第1挿入口の隣に位置する第2挿入口に、前記第2フィンガを前記第1挿入口側にして、前記コネクタの先端を挿入する挿入工程と、
前記第1フィンガを開いて前記コネクタを解放する解放工程と、
を有するコネクタ接続方法。
【請求項4】
前記把持工程は、前記第1フィンガおよび前記第2フィンガの両方を開いた状態で前記グリッパを前記コネクタに向かって前進させ、前記コネクタを前記第1フィンガと前記第2フィンガの間に導入し、前記第1フィンガと前記第2フィンガの両方を閉じて前記コネクタを把持する工程である、
請求項2または3に記載のコネクタ接続方法。
【請求項5】
前記第2フィンガは、先端部が薄く形成されたフィンガである、
請求項2または3に記載のコネクタ接続方法。
【請求項6】
前記第2フィンガは、先端部分が前記コネクタの軸方向から見て楔型に形成されたフィンガである、
請求項5に記載のコネクタ接続方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、線状物の先端にあるコネクタ等の先端部材を、ロボットを用いて相手方コネクタに接続する方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
電線などの先端に取り付けられたコネクタを把持して、対となる相手方コネクタに接続する作業を、ロボットを用いて自動化することが行われている。例えば、特許文献1および2には、電線の先端部に接続されたコネクタをロボットに装着されたグリッパで把持して、コネクタハウジングに接続する先端部材接続方法が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-112470号公報
特開2020-110881号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1および2では、コネクタを接続するコネクタハウジングの周辺には接続の障害となるものは記載されていない。しかし、相手方コネクタの挿入口の近隣に障害物が存在する場合には、コネクタを把持したグリッパが障害物と干渉して、コネクタの挿入に失敗することがあった。また、特許文献1および2では、複数のピンを有する1個のコネクタをコネクタハウジングに接続している。しかし、複数のコネクタを、複数の挿入口を有する相手方コネクタに順次接続する場合、接続部の小型化等の目的で複数の挿入口は密に配列されていると、当該相手方コネクタにすでに接続された他の線状物が障害物となり、コネクタを把持したグリッパがすでに接続された他の線状物と干渉して、当該他の線状物のコネクタや新たに接続しようとするコネクタが変形したり破損したりするという問題があった。
【0005】
本発明は、上記を考慮してなされたものであり、コネクタ等の先端部材を、相手方部材の挿入口の近隣に障害物が存在する場合でも、接続可能な方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
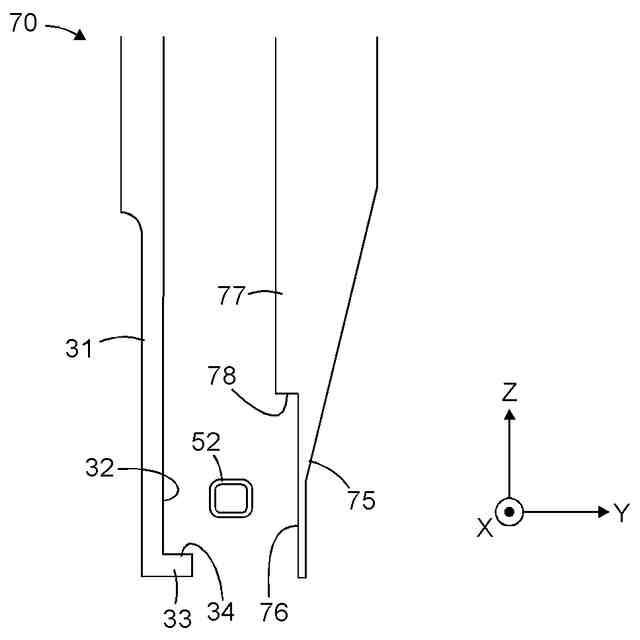
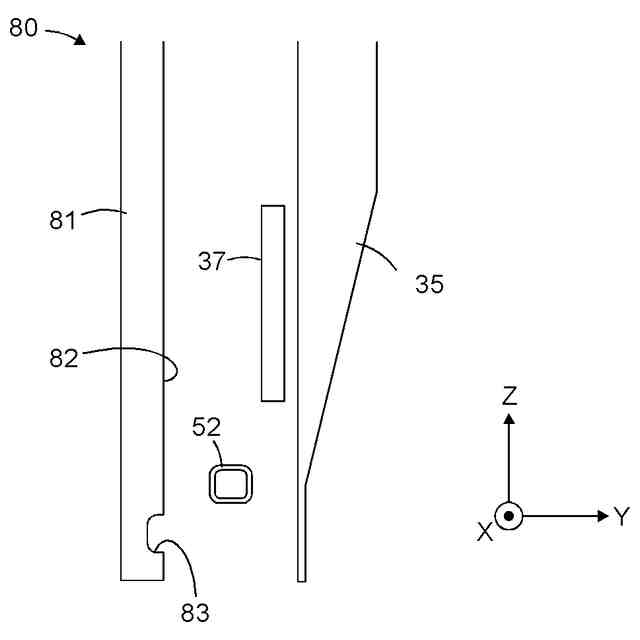
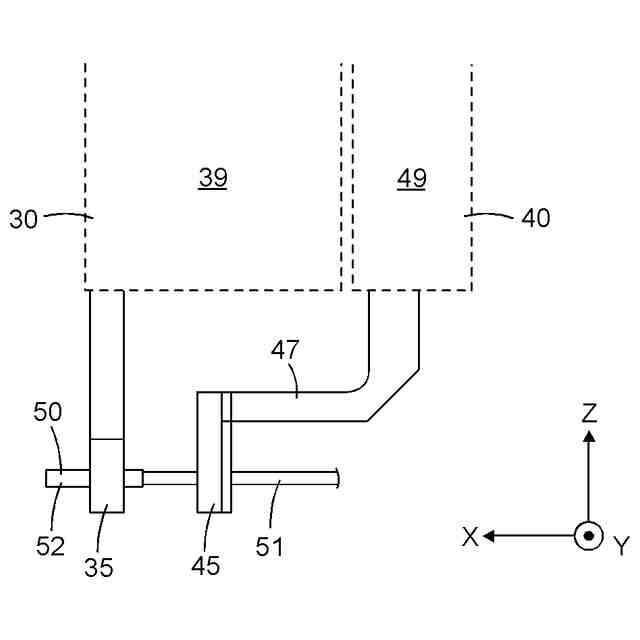
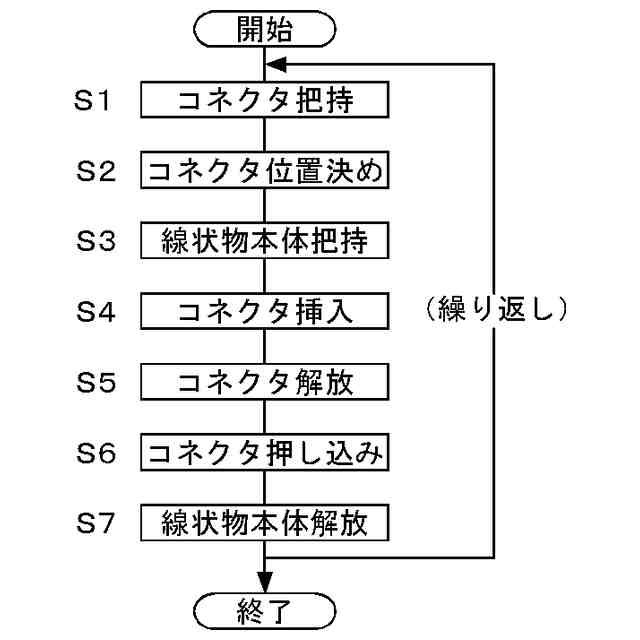
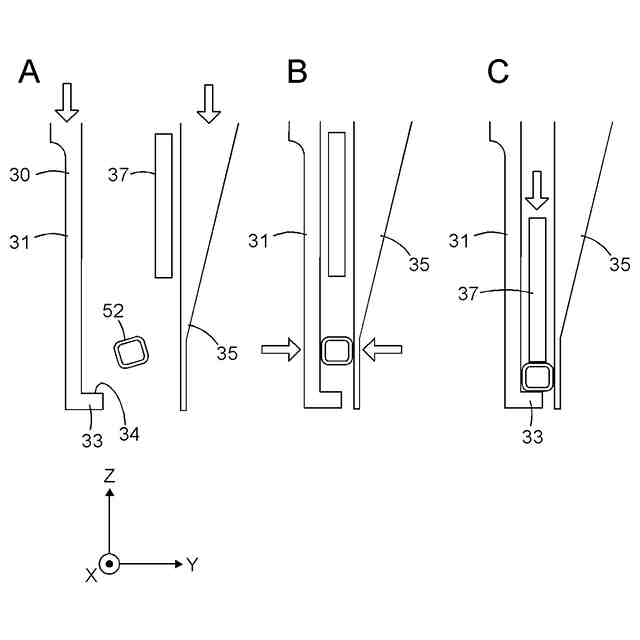
本発明の先端部材接続方法は、線状物本体の先端に取り付けられた先端部材を、近隣に障害物が存在する挿入口を有する相手方部材に接続するための方法であって、ロボットに装着されたグリッパが有する、それぞれ独立して開閉可能な第1フィンガと第2フィンガで前記先端部材を把持する把持工程と、前記グリッパを移動させて、前記近隣に障害物が存在する挿入口に、前記第2フィンガを障害物側にして、前記先端部材の先端を挿入する挿入工程と、前記第1フィンガを開いて前記先端部材を解放する解放工程とを有する。
【0007】
上記先端部材接続方法の代表的な例において、前記先端部材がコネクタであり、前記相手方部材が相手方コネクタである。この場合、当該先端部材接続方法は、線状物本体の先端に取り付けられたコネクタを、近隣に障害物が存在する挿入口を有する相手方コネクタに接続するための方法であって、ロボットに装着されたグリッパが有する、それぞれ独立して開閉可能な第1フィンガと第2フィンガで前記コネクタを把持する把持工程と、前記グリッパを移動させて、前記近隣に障害物が存在する挿入口に、前記第2フィンガを障害物側にして、前記コネクタの先端を挿入する挿入工程と、前記第1フィンガを開いて前記コネクタを解放する解放工程とを有するコネクタ接続方法である。
【0008】
ここで、コネクタとは、対となる相手方コネクタと接続するためのオス型の部品であり、プラグ、ジャック、コンタクトピン、ピン端子、端子、ターミナル端子、圧着端子、金属端子、タブ等の名称で呼ばれるものを含む。相手方コネクタは、対となるコネクタの挿入口を複数備えたメス型の部品であり、レセプタクル、ハウジング、タブ、ソケット、カプラ等の名称で呼ばれるものを含む。
【0009】
本発明の他のコネクタ接続方法は、線状物本体の先端に取り付けられたコネクタを複数の挿入口を有する相手方コネクタに接続するための方法であって、ロボットに装着されたグリッパが有する、それぞれ独立して開閉可能な第1フィンガと第2フィンガで前記コネクタを把持する把持工程と、前記グリッパを移動させて、前記相手方コネクタの前記複数の挿入口のうち、すでに他のコネクタが挿入された第1挿入口の隣に位置する第2挿入口に、前記第2フィンガを前記第1挿入口側にして、前記コネクタの先端を挿入する挿入工程と、前記第1フィンガを開いて前記コネクタを解放する解放工程とを有する。
【0010】
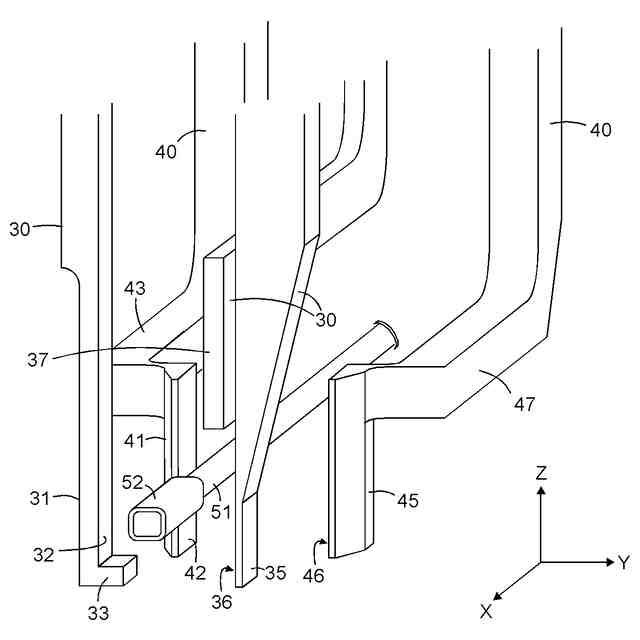
上記いずれかのコネクタ接続方法において、好ましくは、前記把持工程は、前記第1フィンガおよび前記第2フィンガの両方を開いた状態で前記グリッパを前記コネクタに向かって前進させ、前記コネクタを前記第1フィンガと前記第2フィンガの間に導入し、前記第1フィンガと前記第2フィンガの両方を閉じて前記コネクタを把持する工程である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エビス
連結具
1か月前
太陽工業株式会社
チャック装置
4か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社エビス
携帯付属物取付具
2か月前
株式会社ダイヘン
制御装置
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社マキタ
電動ハンマ
3か月前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボット
1か月前
株式会社スター精機
把持装置
4か月前
株式会社マキタ
ハンマドリル
1か月前
SMC株式会社
グリッパ
3か月前
川崎重工業株式会社
ロボット
1か月前
株式会社近藤製作所
産業用ロボットチャック
3か月前
CKD株式会社
吸着型搬送装置
8日前
学校法人立命館
ロボットハンド
2か月前
株式会社安川電機
ロボット
11日前
川崎重工業株式会社
塗装ロボット
15日前
株式会社安川電機
ロボット
11日前
白山工業株式会社
遠隔操作ロボット機構
3か月前
トヨタ自動車株式会社
ロボットチャック
3か月前
ジヤトコ株式会社
圧入装置
7日前
株式会社アイエイアイ
グリッパー
2か月前
長堀工業株式会社
締結装置
24日前
株式会社安川電機
ロボット
11日前
中国電力株式会社
ボルト共回り防止用工具
3か月前
株式会社不二越
垂直多関節ロボット
3か月前
株式会社山下工業研究所
ラチェットレンチ
1か月前
株式会社やまびこ
電動作業機
4か月前
株式会社デンソーウェーブ
産業用ロボット
3か月前
株式会社やまびこ
電動作業機
4か月前
株式会社不二越
ロボットの操作装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ