TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024176641
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023095364
出願日
2023-06-09
発明の名称
ロボットアーム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
17/02 20060101AFI20241212BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ベアリングの破損や損傷を抑制することのできるロボットアームを提供する。
【解決手段】ロボットアームは、内部で連通する第1挿入孔および第2挿入孔を有する第1アームと、前記第1挿入孔に挿入されているベアリングケースと、前記ベアリングケースを貫通して前記第1挿入孔に挿入されている第1歯車と、前記ベアリングケース内に配置され、前記第1歯車が前記第1アームに対して第1回転軸まわりに回転するように支持し、前記第1回転軸に沿って離間して配置された第1ベアリングおよび第2ベアリングと、前記第2挿入孔に挿入され、前記第1アーム内で前記第1歯車と噛み合っている第2歯車と、を有する。
【選択図】図3
特許請求の範囲
【請求項1】
内部で連通する第1挿入孔および第2挿入孔を有する第1アームと、
前記第1挿入孔に挿入されているベアリングケースと、
前記ベアリングケースを貫通して前記第1挿入孔に挿入されている第1歯車と、
前記ベアリングケース内に配置され、前記第1歯車が前記第1アームに対して第1回転軸まわりに回転するように支持し、前記第1回転軸に沿って離間して配置された第1ベアリングおよび第2ベアリングと、
前記第2挿入孔に挿入され、前記第1アーム内で前記第1歯車と噛み合っている第2歯車と、を有することを特徴とするロボットアーム。
続きを表示(約 880 文字)
【請求項2】
前記ベアリングケース、前記第1歯車、前記第1ベアリングおよび前記第2ベアリングがユニット化されている請求項1に記載のロボットアーム。
【請求項3】
前記第1挿入孔は、載置面を有し、
前記載置面に前記ベアリングケースが載置されている請求項1に記載のロボットアーム。
【請求項4】
前記ベアリングケースは、第1部分と、前記第1部分よりも前記第2歯車側に位置し、前記第1部分よりも幅が小さい第2部分と、前記第1部分と前記第2部分との境界部に位置する段差面である被載置面と、を有し、
前記被載置面が前記載置面に載置されている請求項3に記載のロボットアーム。
【請求項5】
前記載置面と前記ベアリングケースとの間に介在し、前記載置面と前記ベアリングケースとの離間距離を調整する調整部材を有する請求項3に記載のロボットアーム。
【請求項6】
前記ベアリングケースに収容され、前記第1ベアリングおよび前記第2ベアリングを前記第1回転軸に沿う方向に予圧する予圧機構を有する請求項1に記載のロボットアーム。
【請求項7】
前記予圧機構は、前記第1ベアリングを前記第1回転軸に沿う方向に予圧する予圧部材と、前記第1ベアリングと前記第2ベアリングとの間に配置され、前記第1ベアリングが前記予圧部材から受ける力を前記第2ベアリングに伝達する予圧伝達部材と、を有する請求項6に記載のロボットアーム。
【請求項8】
前記第1挿入孔は、前記第2歯車側に向けて幅が漸減し、前記ベアリングケースを誘導するガイド部を有する請求項1に記載のロボットアーム。
【請求項9】
前記第1アームに対して前記第1回転軸まわりに回動するように連結されている第2アームを有し、
前記第2アームは、前記第1回転軸に沿う方向からの平面視で、前記ベアリングケースと重なる位置に前記ベアリングケースよりも大きな貫通孔を有する請求項1に記載のロボットアーム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットアームに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、ベースと、ベースに連結されたロボットアームと、を有する6軸構成の垂直多関節ロボットが開示されている。また、ロボットアームは、ベースに対して第1回動軸まわりに回動可能に連結されたショルダ部と、ショルダ部に対して第2回動軸まわりに回動可能に連結された下アームと、下アームに対して第3回動軸まわりに回動可能に連結された第1上アームと、第1上アームに対して第4回動軸まわりに回動可能に連結された第2上アームと、第2上アームに対して第5回動軸まわりに回動可能に連結された手首部と、手首部に対して第6回動軸まわりに回動可能に連結されたフランジと、を有する。
【0003】
また、手首部には、第5回動軸まわりに回転する入力傘歯車と、入力傘歯車と噛み合い第6回動軸まわりに回転する出力傘歯車と、が配置されている。また、入力傘歯車および出力傘歯車は、それぞれ、ベアリングを介して手首部に軸受けされている。
【先行技術文献】
【特許文献】
【0004】
特開2022-070647号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、このような構成の垂直多関節ロボットでは、出力傘歯車との歯当たり調整を行うために入力傘歯車を第5回動軸に沿う方向に移動させると、ベアリングがずれたり、入力傘歯車や第2上アームに接触したりし、破損または損傷するおそれがある。
【課題を解決するための手段】
【0006】
本発明のロボットアームは、内部で連通する第1挿入孔および第2挿入孔を有する第1アームと、
前記第1挿入孔に挿入されているベアリングケースと、
前記ベアリングケースを貫通して前記第1挿入孔に挿入されている第1歯車と、
前記ベアリングケース内に配置され、前記第1歯車が前記第1アームに対して第1回転軸まわりに回転するように支持し、前記第1回転軸に沿って離間して配置された第1ベアリングおよび第2ベアリングと、
前記第2挿入孔に挿入され、前記第1アーム内で前記第1歯車と噛み合っている第2歯車と、を有する。
【図面の簡単な説明】
【0007】
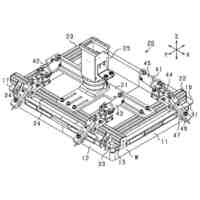
好適な実施形態に係るロボットシステムの全体構成を示す図である。
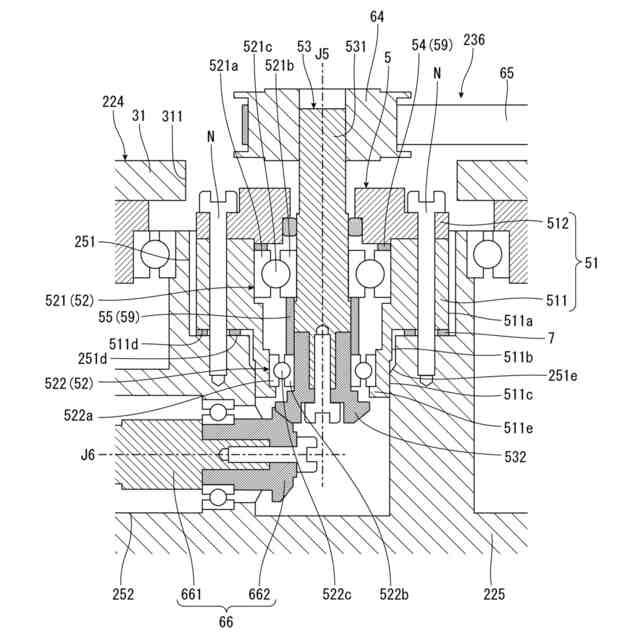
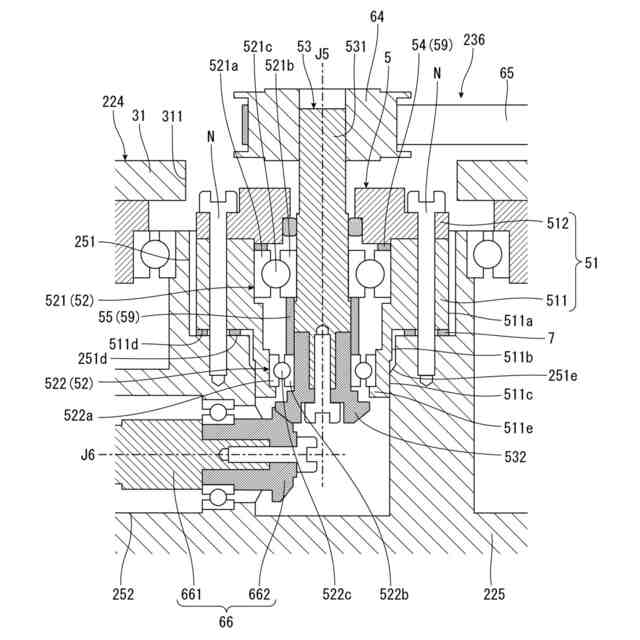
アームの内部を示す断面図である。
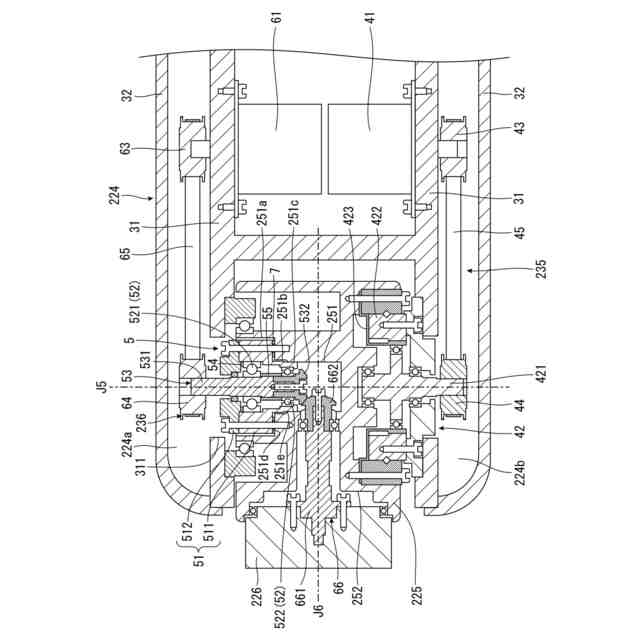
アームの内部を示す断面図である。
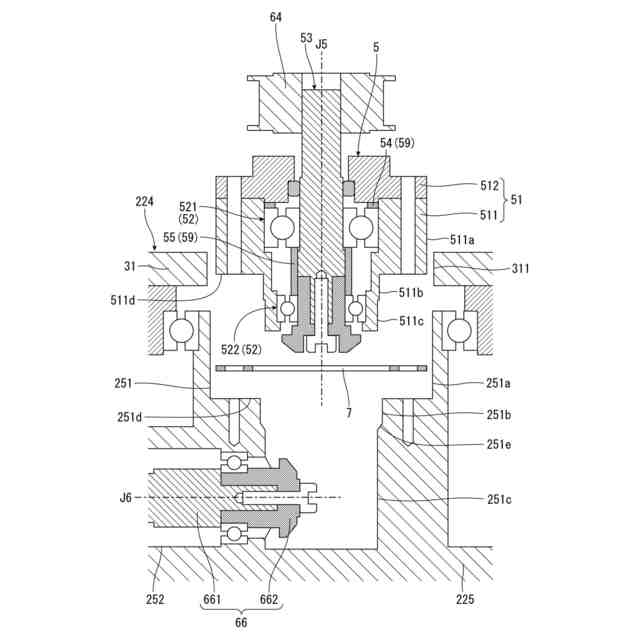
アームから入力傘歯車ユニットを取り外した様子を示す断面図である。
【発明を実施するための形態】
【0008】
以下、ロボットアームの好適な実施形態を添付図面に基づいて説明する。
【0009】
図1は、好適な実施形態に係るロボットシステムの全体構成を示す図である。図2は、アームの内部を示す断面図である。図3は、アームの内部を示す断面図である。図4は、アームから入力傘歯車ユニットを取り外した様子を示す断面図である。
【0010】
図1に示すロボットシステム1は、ロボット2と、ロボット2の駆動を制御するロボットコントローラー10と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
5か月前
個人
関節モジュール
4か月前
個人
寸切りボルト回し
4か月前
個人
スロットルトリガー
5か月前
株式会社エビス
連結具
1か月前
太陽工業株式会社
チャック装置
4か月前
コクヨ株式会社
補助器具
4か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
衝撃工具
7か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
個人
メンテナンス用スタンド
6か月前
川崎重工業株式会社
ロボット
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
2か月前
CKD株式会社
把持装置
5か月前
学校法人立命館
グリッパ
4か月前
オムロン株式会社
電動把持工具
4か月前
東京計器株式会社
接触検知装置
5か月前
トヨタ自動車株式会社
ロボット
5か月前
株式会社エビス
携帯付属物取付具
2か月前
トヨタ自動車株式会社
ハンド構造
7か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社ダイヘン
搬送装置
3か月前
白山工業株式会社
ロボットアーム
5か月前
個人
回転工具およびバリ取り部品
5か月前
個人
容器引っ掛け棒およびその使用方法
6か月前
株式会社ダイヘン
制御装置
2か月前
株式会社ハーモ
開閉チャック装置
6か月前
株式会社ダイヘン
搬送装置
2か月前
川崎重工業株式会社
ロボット
1か月前
株式会社日本キャリア工業
ロボットハンド
6か月前
株式会社スター精機
把持装置
4か月前
トヨタ自動車株式会社
締付判定方法
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ