TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176558
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023095147
出願日
2023-06-09
発明の名称
情報処理装置、産業用装置制御システム及び情報処理方法
出願人
アズビル株式会社
代理人
弁理士法人山王内外特許事務所
主分類
B25J
13/08 20060101AFI20241212BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】従来よりもロボットアームなどの産業用装置の処理に必要な情報を設定するための効率を向上させることができる情報処理装置、産業用装置制御システム及び情報処理方法を提供する。
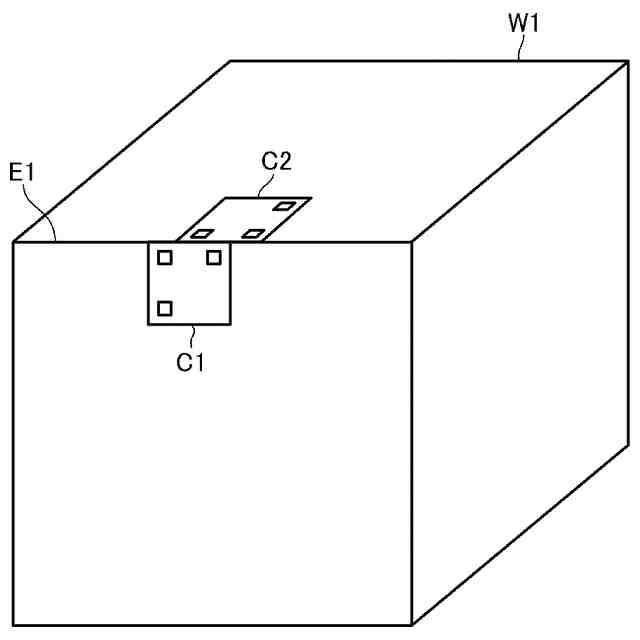
【解決手段】情報処理装置(200)は、産業用装置が扱う対象物W1を撮像する撮像部(201)からの信号に基づいて、対象物(W1)の面に表示された記号(C1、C2)を撮像した撮像情報を取得する撮像情報取得部(203)と、面の位置を示す位置情報を取得する位置情報取得部(205)と、撮像情報取得部によって取得された撮像情報に基づいて、面の方向を示す方向情報を取得する方向情報取得部(204)と、位置情報取得部によって取得された位置情報と、方向情報取得部によって取得された方向情報と、に基づいて、対象物に対する所定の処理を実行するために必要な処理情報を生成する処理情報生成部(206)と、を備えた。
【選択図】図1
特許請求の範囲
【請求項1】
産業用装置が扱う対象物を撮像する撮像部からの信号に基づいて、前記対象物の面に表示された記号を撮像した撮像情報を取得する撮像情報取得部と、
前記面の位置を示す位置情報を取得する位置情報取得部と、
前記撮像情報取得部によって取得された前記撮像情報に基づいて、前記面の方向を示す方向情報を取得する方向情報取得部と、
前記位置情報取得部によって取得された前記位置情報と、前記方向情報取得部によって取得された前記方向情報と、に基づいて、前記対象物に対する所定の処理を実行するために必要な処理情報を生成する処理情報生成部と、を備えた
ことを特徴とする情報処理装置。
続きを表示(約 1,500 文字)
【請求項2】
前記記号は、2次元コードを含み、
前記撮像情報取得部は、前記2次元コードの復号によって得られる復号情報と、前記記号の外観から得られる幾何情報と、を含む撮像情報を取得する
ことを特徴とする請求項1記載の情報処理装置。
【請求項3】
前記産業用装置の所定部位が前記処理情報生成部によって生成された前記処理情報に従って移動するための、前記産業用装置に対する指令値を演算する指令値演算部を備えた
ことを特徴とする請求項1記載の情報処理装置。
【請求項4】
前記撮像情報取得部は、前記撮像部からの信号に基づいて、前記対象物の第1面に表示された第1記号を撮像した第1撮像情報と、前記第1面に隣接配置された前記対象物の第2面に表示された第2記号を撮像した第2撮像情報と、を取得し、
前記位置情報取得部は、前記第1面の位置を示す第1位置情報と、前記第2面の位置を示す第2位置情報と、を取得し、
前記方向情報取得部は、前記撮像情報取得部によって取得された前記第1撮像情報及び前記第2撮像情報に基づいて、前記第1面の方向を示す第1方向情報と前記第2面の方向を示す第2方向情報とを取得し、
前記処理情報生成部は、前記位置情報取得部によって取得された前記第1位置情報及び前記第2位置情報と、前記方向情報取得部によって取得された前記第1方向情報及び前記第2方向情報と、に基づいて得られた、前記第1面と前記第2面とによって形成される稜線に基づく処理情報を生成する
ことを特徴とする請求項1記載の情報処理装置。
【請求項5】
前記対象物の幾何情報を取得する幾何情報取得部を備え、
前記処理情報生成部は、前記位置情報取得部によって取得された前記位置情報と、前記方向情報取得部によって取得された前記方向情報と、前記幾何情報取得部によって取得された前記対象物の前記幾何情報と、に基づいて、前記処理情報を生成する
ことを特徴とする請求項1記載の情報処理装置。
【請求項6】
前記対象物の幾何情報を取得する幾何情報取得部と、
前記対象物の前記幾何情報に基づいて、前記処理情報に従った前記産業用装置の前記所定部位の移動を制限する制限部と、を備えた
ことを特徴とする請求項3記載の情報処理装置。
【請求項7】
請求項1乃至5のいずれか1項記載の情報処理装置と、
前記処理情報生成部によって生成された前記処理情報に基づいて、前記産業用装置を制御する産業用装置制御装置と、を備えた
ことを特徴とする産業用装置制御システム。
【請求項8】
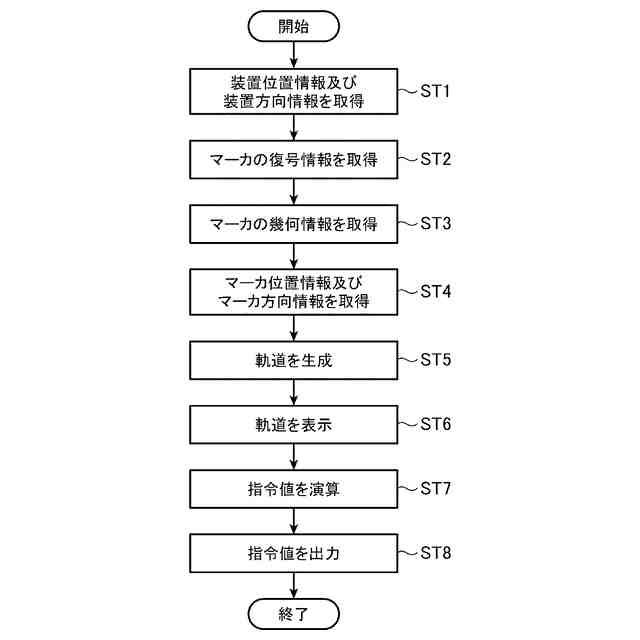
撮像情報取得部と、位置情報取得部と、方向情報取得部と、処理情報生成部と、を備えた装置が行う情報処理方法であって、
前記撮像情報取得部が、産業用装置が扱う対象物を撮像する撮像部からの信号に基づいて、前記対象物の面に表示された記号を撮像した撮像情報を取得するステップと、
前記位置情報取得部が、前記面の位置を示す位置情報を取得するステップと、
前記方向情報取得部が、前記撮像情報取得部によって取得された前記撮像情報に基づいて、前記面の方向を示す方向情報を取得するステップと、
前記処理情報生成部が、前記位置情報取得部によって取得された前記位置情報と、前記方向情報取得部によって取得された前記方向情報と、に基づいて、前記対象物に対する所定の処理を実行するために必要な処理情報を生成するステップと、を備えた
ことを特徴とする情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置、産業用装置制御システム及び情報処理方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
一般に、産業用の加工装置や搬送装置やロボットアームなどの産業用装置に所定の処理をさせる際、例えば予めロボットアームに対する教示を行い、ロボットアームの所定部位の軌道をロボット制御装置に記憶させる。従来、ロボットアーム(アーム)に対する教示を行う方法として、操作者がロボットアームに直接触れて外力を加えて操作することによる直接教示(リードスルー教示)と呼ばれる方法が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-037172号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されたような直接教示によるロボットアームの制御は、操作者がロボットアームを操作した際の所定部位の軌道によって、ロボットアームが作業を行う際にロボットアームの動作を制御するための指令値が決定される。このため、例えば、ロボットアームの動作に正確性が求められるワークの研磨作業等、ロボットアームの作業によっては、過剰に丁寧な直接教示になってしまえば効率が悪くなり、逆に効率を重視して雑な直接教示になってしまえばロボットアームの動作に十分な正確性が得られない場合があるという課題がある。
【0005】
本開示は、上記課題を解決するものであって、従来よりもロボットアームなどの産業用装置の処理に必要な情報を設定するための効率を向上させ、結果として産業用装置の動作の正確性を向上させることができる情報処理装置、産業用装置制御システム及び情報処理方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
本開示に係る情報処理装置は、対象物を撮像する撮像部からの信号に基づいて、対象物の面に表示された記号を撮像した撮像情報を取得する撮像情報取得部と、面の位置を示す位置情報を取得する位置情報取得部と、撮像情報取得部によって取得された撮像情報に基づいて、面の方向を示す方向情報を取得する方向情報取得部と、位置情報取得部によって取得された位置情報と、方向情報取得部によって取得された方向情報と、に基づいて、対象物に対する所定の処理を実行するために必要な処理情報を生成する処理情報生成部と、を備えたことを特徴とする。
【発明の効果】
【0007】
本開示によれば、情報処理装置が対象物の面の位置と当該面の方向とに基づいて、例えばロボットアームの所定部位の軌道を決定するために必要な情報(処理情報)を生成するので、ロボットアームに対する直接教示に基づいて軌道を生成する場合などと比較して、ロボットアームなどの産業用装置の処理に必要な情報を設定するための効率を向上させ、結果として産業用装置の動作の正確性を向上させることができる。
【図面の簡単な説明】
【0008】
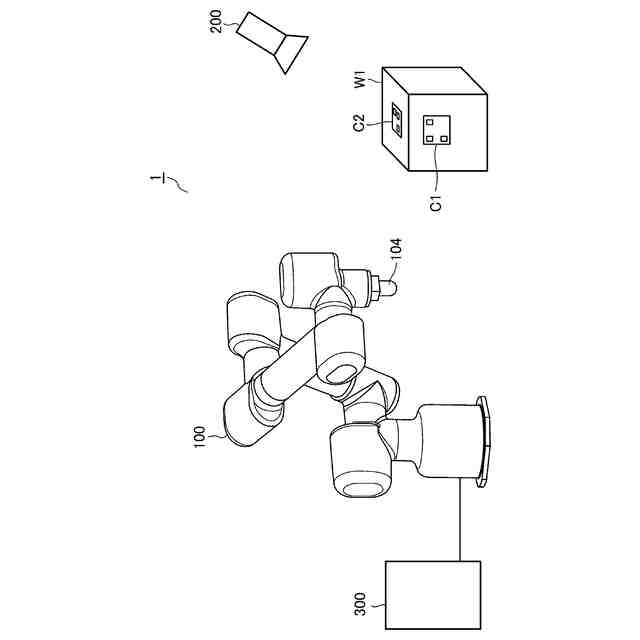
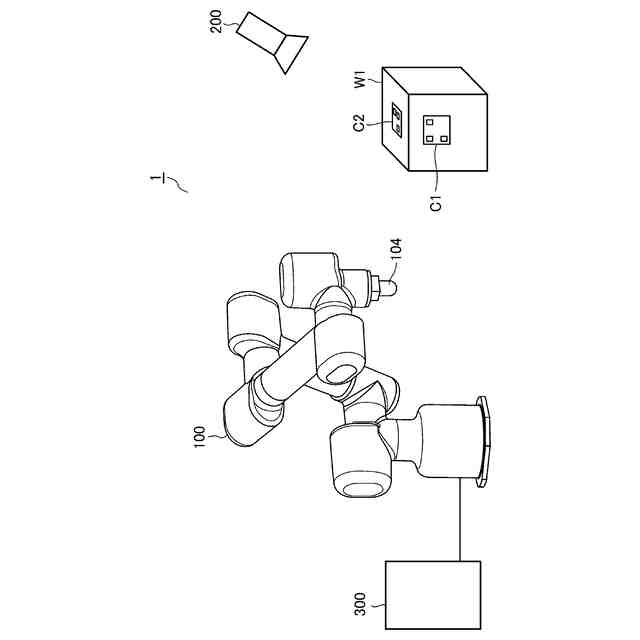
実施の形態1に係るロボット制御システムを示す概略図。
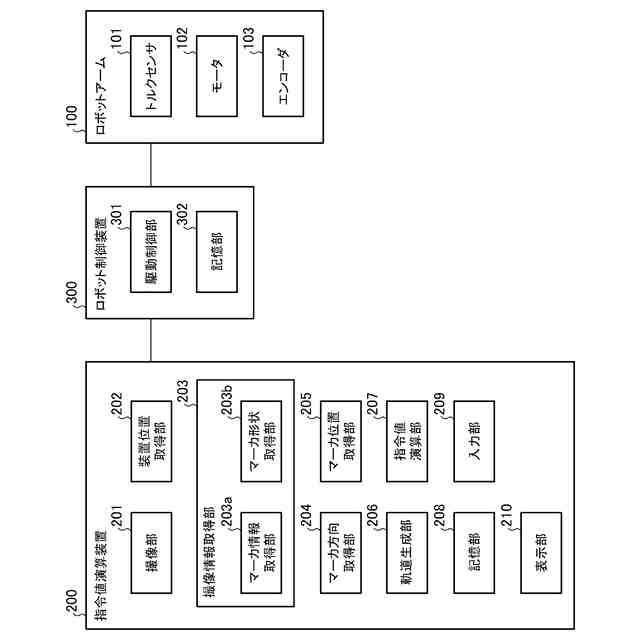
実施の形態1に係るロボット制御システムの構成を示すブロック図。
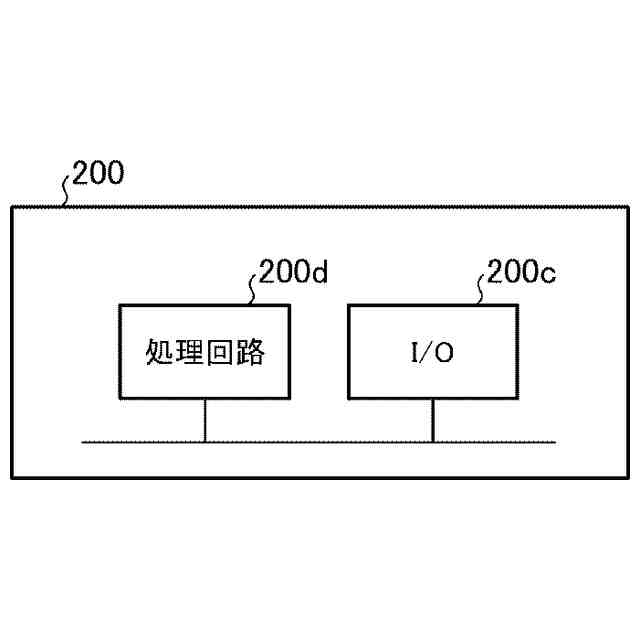
実施の形態1に係る指令値演算装置のハードウェア構成の一例を示す図。
実施の形態1に係る指令値演算装置のハードウェア構成の一例を示す図。
実施の形態1に係る指令値演算装置が行う処理を示すフローチャート。
実施の形態1に係る指令値演算装置が、ワークの面の位置を示す位置情報及び面の方向を示す方向情報を取得するために、ワークの面に2つのマーカが表示されている例を示す図。
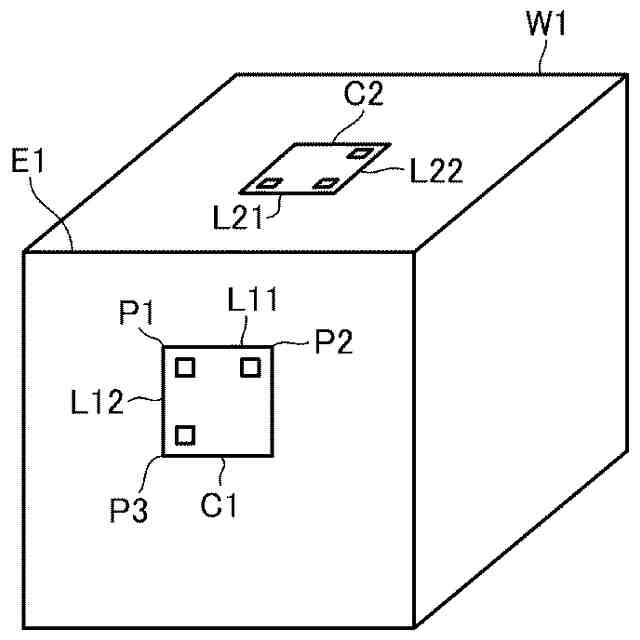
実施の形態1に係る指令値演算装置が、ワークの面の位置を示す位置情報及び面の方向を示す方向情報を取得するために、ワークの面に4つのマーカが表示されている例を示す図。
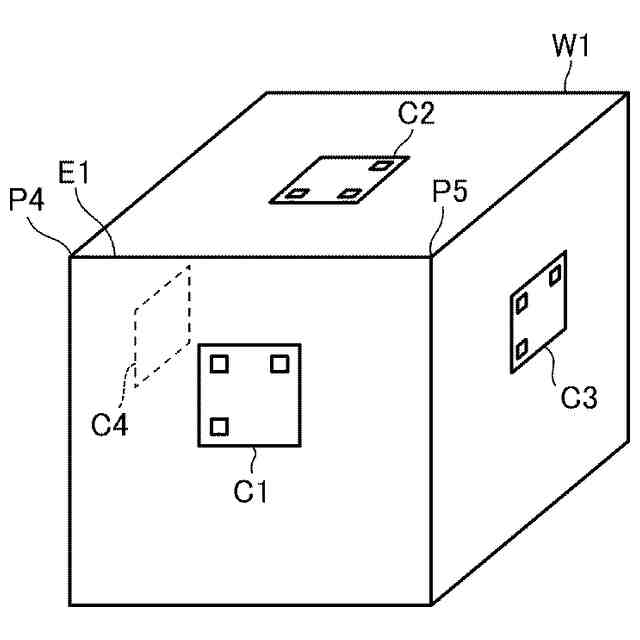
実施の形態1に係る指令値演算装置が、ワークの面の位置を示す位置情報及び面の方向を示す方向情報を取得するために、ワークの稜線に沿ってマーカが表示されている例を示す図。
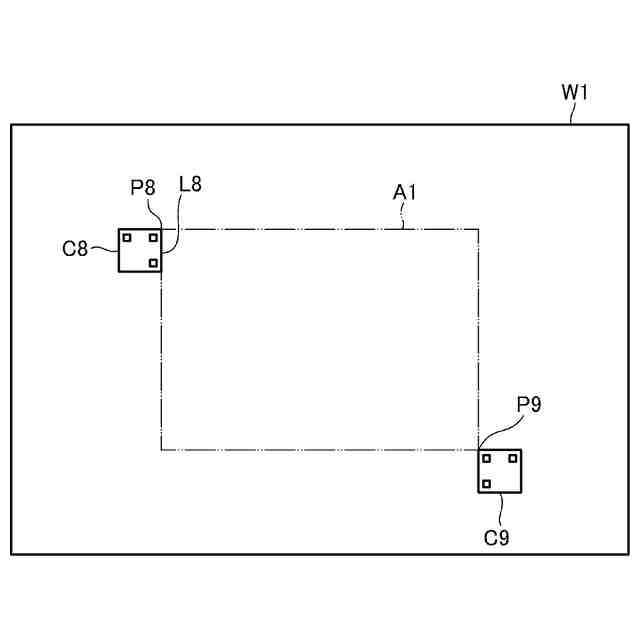
実施の形態1に係る指令値演算装置が、ロボットアームの所定部位の軌道を生成する範囲を設定するために、ワークの1つの面に2つのマーカが表示されている例を示す図。
実施の形態1に係る指令値演算装置が、ロボットアームの所定部位の軌道を生成する範囲を設定するために、ワークの1つの面に4つのマーカが表示されている例を示す図。
実施の形態1に係る指令値演算装置が、ロボットアームの所定部位の軌道を生成する範囲を設定するために、円筒状の面を有するワークの面にマーカが表示されている例を示す図。
実施の形態1に係る指令値演算装置が、ロボットアームの所定部位の軌道を生成する範囲を設定するために、曲面を有するワークの面にマーカが表示されている例を示す図。
実施の形態1に係る指令値演算装置が、ロボットアームの所定部位の軌道を生成する範囲を設定するために、球面を有するワークの面にマーカが表示されている例を示す図。
実施の形態2に係るロボット制御システムの構成を示すブロック図。
実施の形態2に係る指令値演算装置が行う処理を示すフローチャート。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施の形態について図面を参照しながら詳細に説明する。なお、本開示に係る産業用装置制御システムの代表的な適用例として、ロボット制御システムについて説明するが、本開示はロボットに限らず、対象物を搬送する搬送装置、対象物の加工を行う加工装置等の産業用装置に広く適用可能である。
実施の形態1.
図1は、実施の形態1に係るロボット制御システム1の構成例を示す図である。図1に示すように、ロボット制御システム1は、ロボットアーム100と、情報処理装置としての指令値演算装置200と、ロボット制御装置300と、を備えている。
【0010】
ロボットアーム100は、互いに相対移動可能な2以上の複数のリンクと、先端に取り付けられているエンドエフェクタ104と、を有している。複数のリンクは、それぞれ特定の中心軸線を回動中心として隣接するリンク同士が相対的に回動可能になるように、互いに連結されている。例えば、ロボットアーム100は、6個の関節を有する6軸垂直多関節ロボットとして構成されている。ロボットアーム100は、1つ又は複数のリンクが移動することで、エンドエフェクタ104によって作業対象であるワークW1に対する作業を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
圧力センサ
4日前
アズビル株式会社
湿度センサ
19日前
アズビル株式会社
検査用プローブ
12日前
アズビル株式会社
静電容量型センサおよび圧力センサ
12日前
アズビル株式会社
建物管理システム、方法およびプログラム
4日前
アズビル株式会社
情報処理装置、情報処理方法及び情報処理プログラム
22日前
個人
腰袋
25日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
18日前
国立大学法人金沢大学
ロボット
4日前
川崎重工業株式会社
ロボットリスト
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
日本車輌製造株式会社
締め付け工具
1か月前
株式会社ケー・エフ・シー
締結構造
8日前
日本信号株式会社
作業機制御システム
18日前
川崎重工業株式会社
ロボットシステム
1か月前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
19日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
長堀工業株式会社
締結装置
2か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社アマダ
磁気吸着装置
1か月前
トヨタ自動車株式会社
把持装置、把持方法
12日前
株式会社マキタ
集塵アタッチメント
18日前
株式会社スター精機
ワーク搬送装置
22日前
モトコマ株式会社
寄せポンチホルダー
1か月前
株式会社コスメック
把持装置
5日前
トヨタ自動車株式会社
制御装置及び制御方法
1か月前
川崎重工業株式会社
ロボットシステム
25日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社マキタ
電動工具用集塵システム
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ