TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024175642
公報種別
公開特許公報(A)
公開日
2024-12-18
出願番号
2023198939
出願日
2023-11-24
発明の名称
パラレルリンクマニピュレータ
出願人
ライオンパワー株式会社
代理人
個人
,
個人
主分類
B25J
11/00 20060101AFI20241211BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】簡単な構造であり、狭い作業空間や奥行きの深い作業空間であっても、ワークの移動や固定作業等のハンドリングが容易なパラレルリンクマニピュレータの提供を目的とする。
【解決手段】ベース部材と可動部材と複数の弾性支柱部材とを備え、前記複数の弾性支柱部材の一端側はそれぞれ前記ベース部材に固定してあり、前記複数の弾性支柱部材の他端側の途中はそれぞれ独立して、連結長さを可変制御可能に前記可動部材と連結してあることを特徴とする。
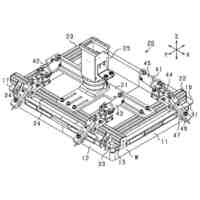
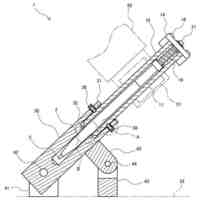
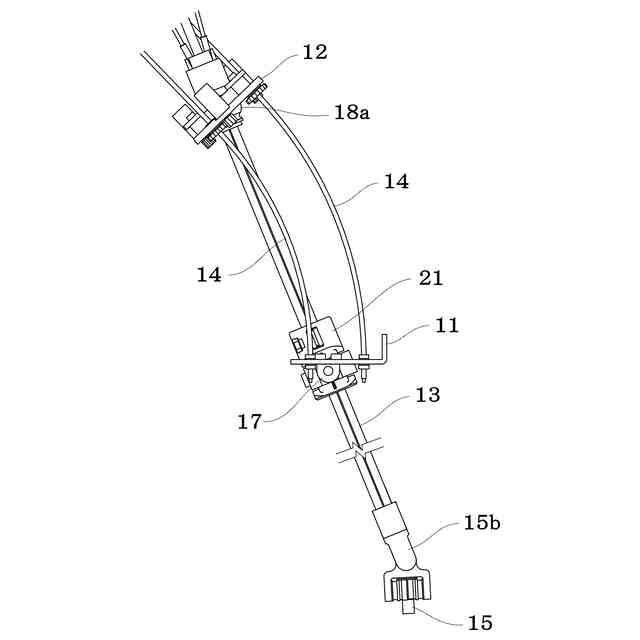
【選択図】 図1
特許請求の範囲
【請求項1】
ベース部材と可動部材と複数の弾性支柱部材とを備え、
前記複数の弾性支柱部材の一端側はそれぞれ前記ベース部材に固定してあり、
前記複数の弾性支柱部材の他端側の途中はそれぞれ独立して、連結長さを可変制御可能に前記可動部材と連結してあることを特徴とするパラレルリンクマニピュレータ。
続きを表示(約 480 文字)
【請求項2】
前記ベース部材は上昇,下降移動及び前後,左右移動可能に設けたハンド軸を有し、前記ハンド軸の端部側を前記可動部材に連結してあることを特徴とする請求項1記載のパラレルリンクマニピュレータ。
【請求項3】
前記ハンド軸の先端側に、ワークを把持するためのハンドを有し、前記ハンド軸は内側に前記ハンドを操作するためのワイヤーの挿通部を有していることを特徴とする請求項2記載のパラレルリンクマニピュレータ。
【請求項4】
前記ハンド軸は前記可動部材と球面軸受にて連結されていることを特徴とする請求項2記載のパラレルリンクマニピュレータ。
【請求項5】
前記ハンド軸は前記ベース部材に対して上昇,下降移動可能であるとともに左右及び前後自在軸継手にて連結してあることを特徴とする請求項4記載のパラレルリンクマニピュレータ。
【請求項6】
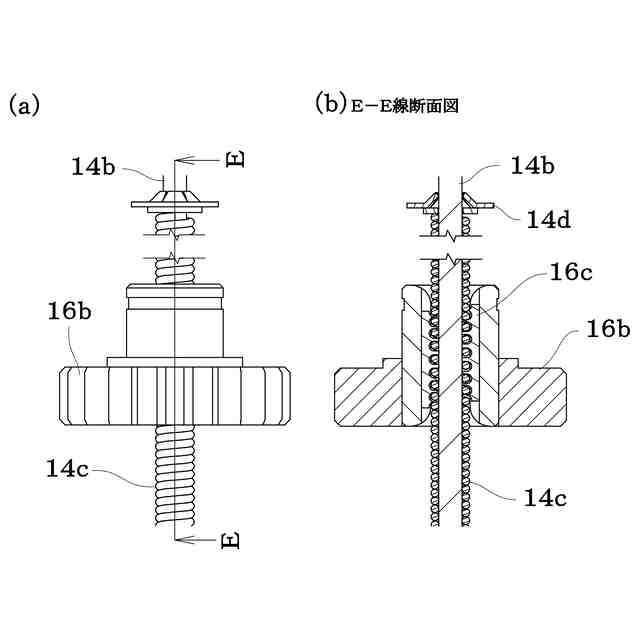
前記弾性支柱部材は芯材にコイルバネを巻装しておねじ部を有し、前記可動部材はめねじ部を形成してあることを特徴とする請求項1記載のパラレルリンクマニピュレータ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワークをハンドリングするためのパラレルリンク機構からなるマニピュレータに関し、特に作業空間の狭い領域にて用いられるパラレルリンクマニピュレータに係る。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
パラレルリンク機構からなるマニピュレータは、複数のリンクをパラレルに配置し、エンドエフェクタ等を移動,回転,開閉制御するのに広く採用されている。
例えば特許文献1には、複数のリンクをそれぞれリニアアクチュエータにて直線移動制御する微細作業用マニピュレータを開示する。
特許文献2には、複数の自由度を有するパラレルリンクの各リンクをリニアアクチュエータで移動制御する微細作業支援システム及び微細作業用マニピュレータを開示する。
しかし、これらの技術は、リニアアクチュエータを用いている点で構造が複雑であり、大きな作業領域が必要となる。
【先行技術文献】
【特許文献】
【0003】
特開2023-24476号公報
特開2017-87322号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、簡単な構造であり、狭い作業空間や奥行きの深い作業空間であっても、ワークの移動や固定作業等のハンドリングが容易なパラレルリンクマニピュレータの提供を目的とする。
【課題を解決するための手段】
【0005】
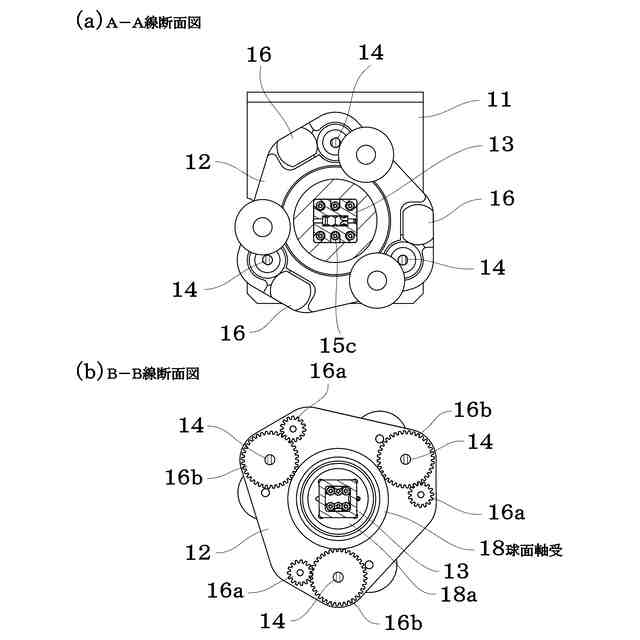
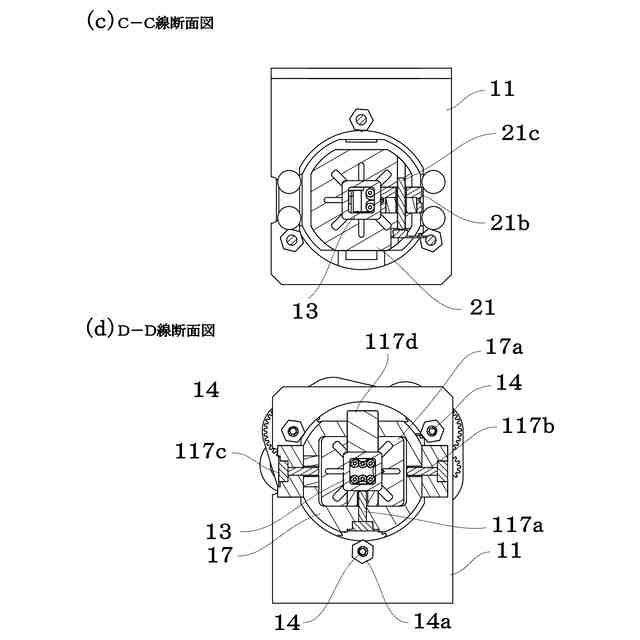
本発明に係るパラレルリンクマニピュレータは、ベース部材と可動部材と複数の弾性支柱部材とを備え、前記複数の弾性支柱部材の一端側はそれぞれ前記ベース部材に固定してあり、前記複数の弾性支柱部材の他端側の途中はそれぞれ独立して、連結長さを可変制御可能に前記可動部材と連結してあることを特徴とする。
【0006】
ここで弾性支柱部材とは、曲げ方向に負荷が加わると、復帰方向に復元力が働くばね性の有するシャフト状の部材をいう。
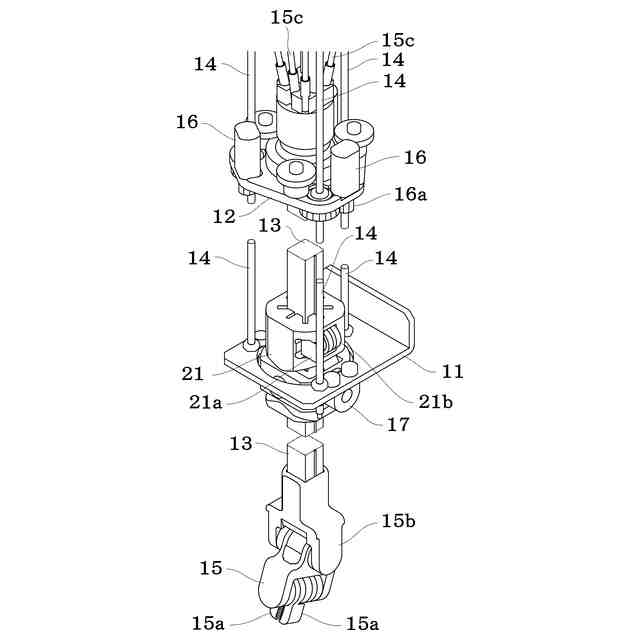
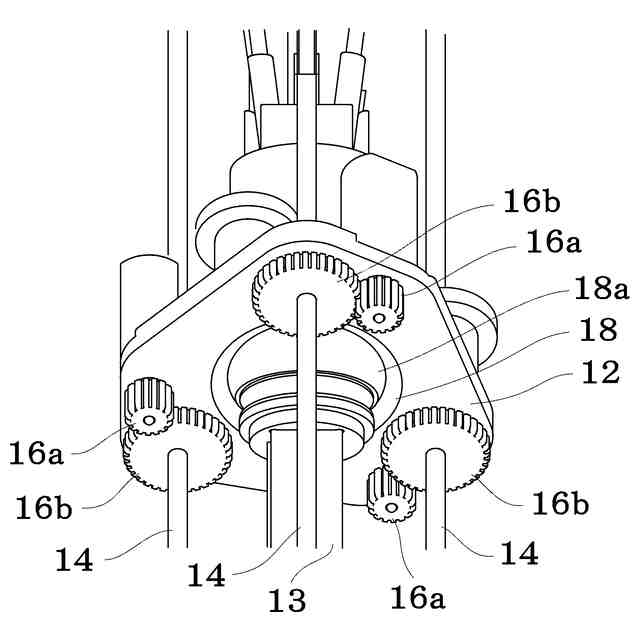
本発明は、例えば3本等の複数の弾性支柱部材の一端側を固定部材に連結し、他端側をそれぞれの弾性支柱部材の固定部材との連結長さが可変できるように、可動部材と連結した点に特徴がある。
このようにすると、固定部材と可動部材とを連結した3本の弾性支持部材のうち、1本の弾性支柱部材の連結長さを他の弾性支柱部材よりも短くすると、他の連結長さが長い弾性支柱部材は短くなった弾性支柱部材側に向けて倒れ込むように曲がることになる。
また、3本の弾性支柱部材の連結長さが等しくなると、可動部材は固定部材から直立するように復帰する。
したがって、3本の弾性支柱部材の連結長さを相互に可変することで、固定部材に対する可動部材のX-Y位置座標を制御することができ、3本の弾性支柱部材の連結長さを等しくしつつ可変すると、Z位置座標の制御が可能になる。
ここで、弾性支柱部材の連結長さを可変する構成の具体例としては、弾性支柱部材は芯材にコイルバネを巻装しておねじ部を有し、前記可動部材はめねじ部を形成する例が挙げられる。
このようにすると、芯材がばね材であっても、コイルばねで容易にねじを形成することができる。
【0007】
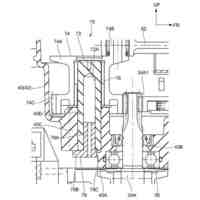
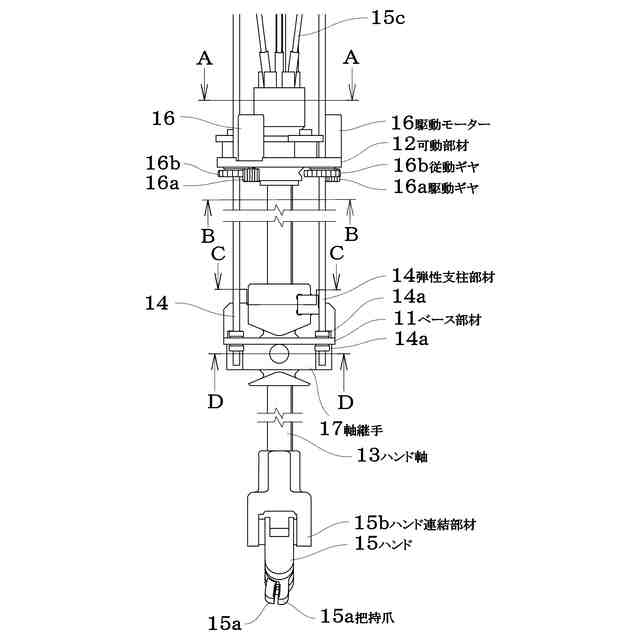
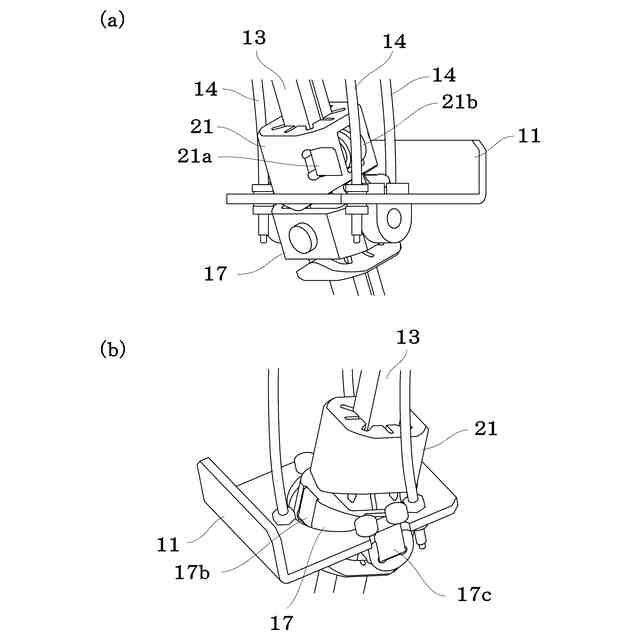
本発明おいては、ベース部材は上昇,下降移動及び前後,左右移動可能に設けたハンド軸を有し、前記ハンド軸の端部側を前記可動部材に連結してあり、ハンド軸の先端側に、ワークを把持するためのハンドを有し、前記ハンド軸は内側に前記ハンドを操作するためのワイヤーの挿通部を有しているようにすることができる。
このようにすると、ハンド軸の先端側に連結したハンドを上昇及び下降移動制御でき、前後方向や左右方向に移動制御することができ、さらにハンド軸の内側に配設した操作ワイヤーの操作により、ハンドの把持爪の開閉操作ができる。
【0008】
本発明において、ハンド軸は前記可動部材と球面軸受にて連結されていてもよい。
このようにすると、ハンド軸と可動部材との連結角度が自由自在になる。
【0009】
本発明において、ハンド軸は前記ベース部材に対して上昇,下降移動可能であるとともに左右及び前後自在軸継手にて連結してあってもよい。
このようにすると、ベース部材に対してハンド軸が上昇及び下降移動できるとともに、さらに左右,前後に移動し、傾斜可能になる。
【発明の効果】
【0010】
本発明に係るパラレルリンクマニピュレータは、ベース部材に対して複数のシャフト状の弾性支柱部材を介して、可動部材をパラレルにリンク連結したので、この複数の弾性支柱部材の相互の連結長さを制御することで、この複数の弾性支柱部材の相互の曲がり弾性変形により、ベース部材に対する可動部材が移動する位置座標を容易に制御することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
関節モジュール
5か月前
個人
寸切りボルト回し
5か月前
株式会社エビス
連結具
2か月前
太陽工業株式会社
チャック装置
4か月前
コクヨ株式会社
補助器具
5か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
電動工具
5日前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
2か月前
オムロン株式会社
電動把持工具
5か月前
株式会社マキタ
打撃工具
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社エビス
携帯付属物取付具
3か月前
株式会社ダイヘン
搬送装置
4か月前
株式会社ダイヘン
制御装置
3か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボットアーム
5日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットアーム
5日前
株式会社スター精機
把持装置
4か月前
SMC株式会社
グリッパ
3か月前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボットリスト
5日前
日本車輌製造株式会社
締め付け工具
5日前
株式会社近藤製作所
産業用ロボットチャック
3か月前
川崎重工業株式会社
ロボットシステム
5日前
CKD株式会社
吸着型搬送装置
19日前
学校法人立命館
ロボットハンド
2か月前
工機ホールディングス株式会社
作業機
5か月前
日本電業工作株式会社
移動装置
5か月前
フジセン技工株式会社
マーキング装置
5か月前
株式会社安川電機
ロボット
22日前
株式会社安川電機
ロボット
22日前
トヨタ自動車株式会社
ロボットチャック
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ