TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024175409
公報種別
公開特許公報(A)
公開日
2024-12-18
出願番号
2023093180
出願日
2023-06-06
発明の名称
ロボット用吸着ハンド、ロボットおよび廃棄物処理システム
出願人
川崎重工業株式会社
代理人
個人
主分類
B25J
15/06 20060101AFI20241211BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】廃棄物同士が衝突することを回避することが可能で、かつ、複数の廃棄物を吸着して処理能力を向上させることが可能なロボット用吸着ハンドを提供する。
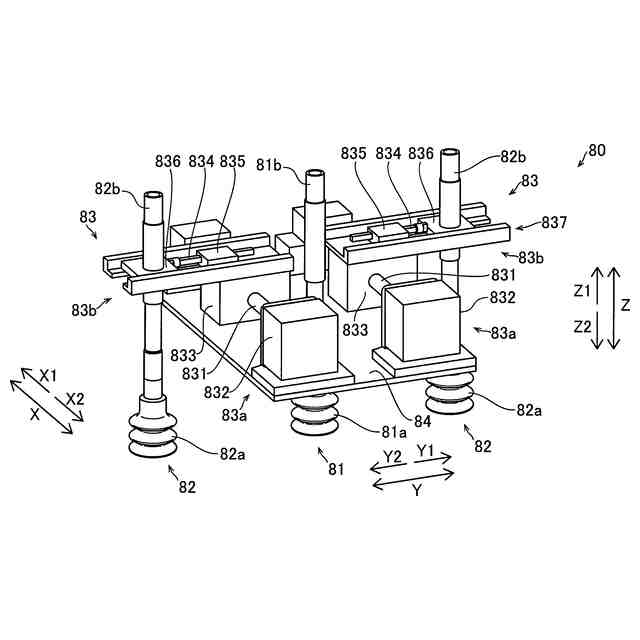
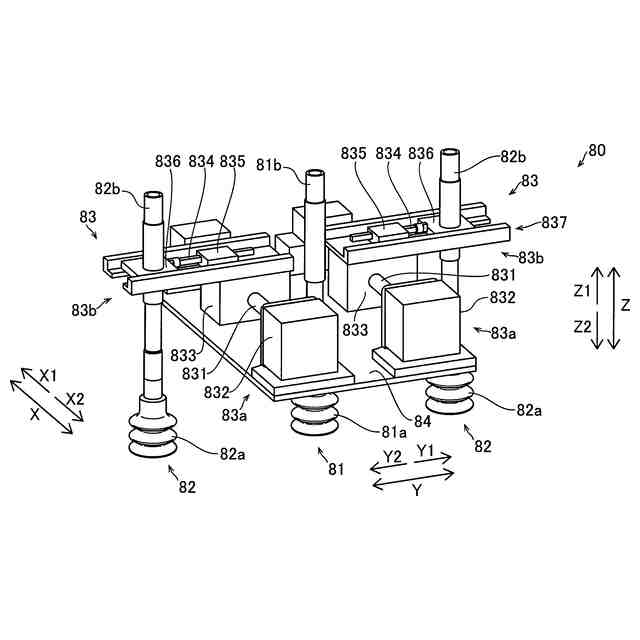
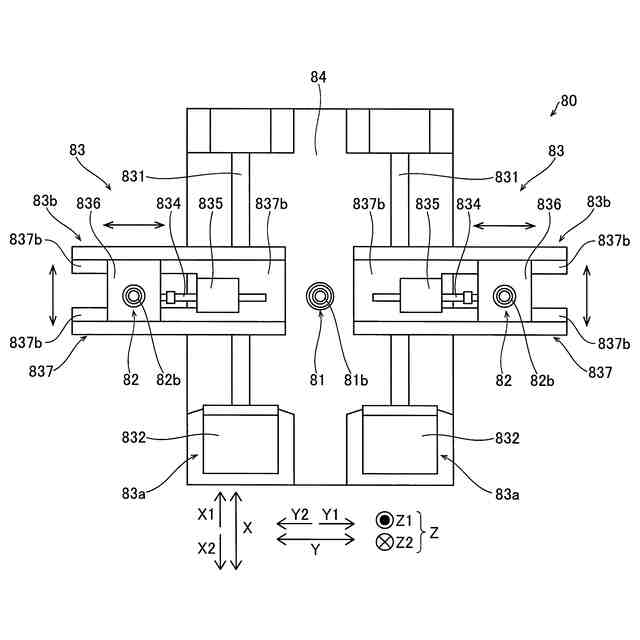
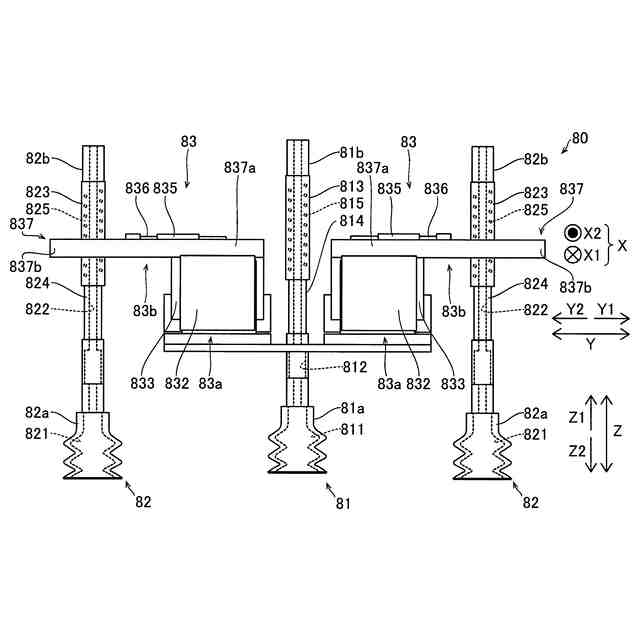
【解決手段】このロボット用吸着ハンド80は、廃棄物としてのビンBを吸着する第1吸着部81と、第1吸着部81の周りに配置され、廃棄物としてのビンBを吸着する第2吸着部82と、第1吸着部81に対して第2吸着部82を相対的に水平方向に移動させる水平移動機構83と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
廃棄物を吸着する第1吸着部と、
前記第1吸着部の周りに配置され、廃棄物を吸着する第2吸着部と、
前記第1吸着部に対して前記第2吸着部を相対的に水平方向に移動させる水平移動機構と、を備える、ロボット用吸着ハンド。
続きを表示(約 1,500 文字)
【請求項2】
前記水平移動機構は、前記第1吸着部に対して前記第2吸着部を相対的に水平方向の第1方向に移動させる第1水平移動機構と、前記第1吸着部に対して前記第2吸着部を相対的に前記第1方向に交差する水平方向の第2方向に移動させる第2水平移動機構と、を含む、請求項1に記載のロボット用吸着ハンド。
【請求項3】
前記第1方向は、前記第1吸着部と前記第2吸着部とが並ぶ基準状態において前記第1吸着部と前記第2吸着部とが並ぶ方向に直交する方向に沿った方向であり、
前記第2方向は、前記基準状態において前記第1吸着部と前記第2吸着部とが並ぶ方向に沿った方向である、請求項2に記載のロボット用吸着ハンド。
【請求項4】
前記第1水平移動機構を支持する支持部をさらに備え、
前記第1水平移動機構は、前記第2水平移動機構を支持し、
前記第2水平移動機構は、前記第2吸着部を支持する、請求項2に記載のロボット用吸着ハンド。
【請求項5】
前記第2吸着部は、複数設けられており、
前記水平移動機構は、前記複数の第2吸着部の各々に対して設けられている、請求項1に記載のロボット用吸着ハンド。
【請求項6】
前記複数の第2吸着部の2つは、前記第1吸着部と前記第2吸着部とが並ぶ基準状態において前記第1吸着部と前記第2吸着部とが並ぶ方向に沿った方向において、前記第1吸着部に対して両側に配置されている、請求項5に記載のロボット用吸着ハンド。
【請求項7】
ロボットアームと、
前記ロボットアームの先端に接続されたロボット用吸着ハンドと、を備え、
前記ロボット用吸着ハンドは、廃棄物を吸着する第1吸着部と、前記第1吸着部の周りに配置され、廃棄物を吸着する第2吸着部と、前記第1吸着部に対して前記第2吸着部を相対的に水平方向に移動させる水平移動機構と、を含む、ロボット。
【請求項8】
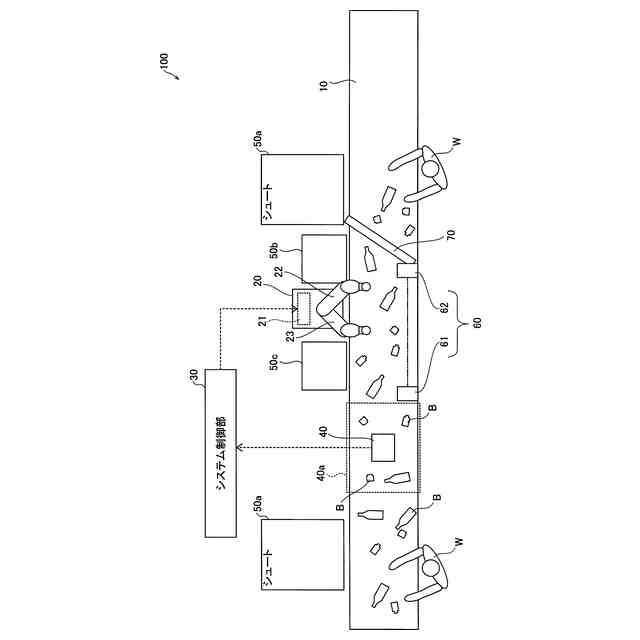
廃棄物を搬送する搬送部と、
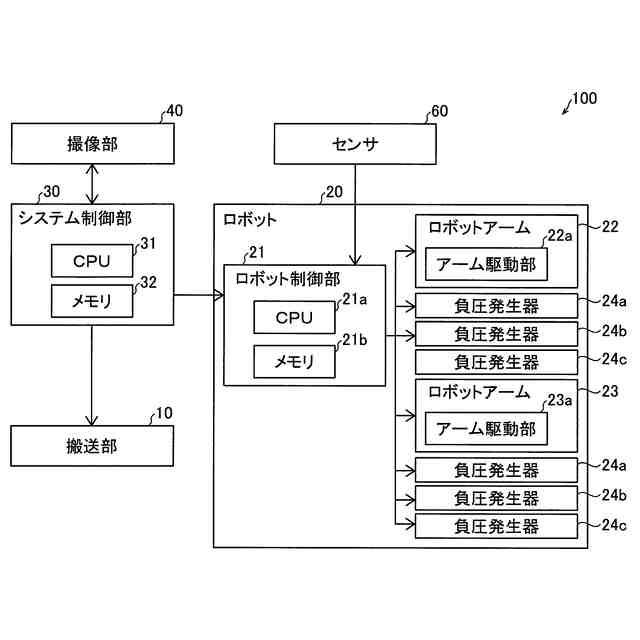
前記搬送部により搬送される廃棄物を撮像する撮像部と、
前記搬送部により搬送される廃棄物を仕分けするロボットと、
前記ロボットによる廃棄物の仕分け動作を制御する制御部と、を備え、
前記ロボットは、ロボットアームと、前記ロボットアームの先端に接続されたロボット用吸着ハンドと、を含み、
前記ロボット用吸着ハンドは、廃棄物を吸着する第1吸着部と、前記第1吸着部の周りに配置され、廃棄物を吸着する第2吸着部と、前記第1吸着部に対して前記第2吸着部を相対的に水平方向に移動させる水平移動機構と、を有する、廃棄物処理システム。
【請求項9】
前記制御部は、前記撮像部により撮像された画像に基づいて、前記第1吸着部が吸着する第1廃棄物の吸着点を取得するとともに、取得した前記第1廃棄物の吸着点の周辺領域に前記第2吸着部による吸着可能範囲を設定し、設定した前記吸着可能範囲内に前記第1廃棄物とは異なる第2廃棄物の吸着点が存在する場合、前記第1吸着部および前記第2吸着部の両方に負圧を発生させるとともに、設定した前記吸着可能範囲内に前記第2廃棄物の吸着点が存在しない場合、前記第2吸着部には負圧を発生させずに前記第1吸着部に負圧を発生させる制御を行う、請求項8に記載の廃棄物処理システム。
【請求項10】
前記制御部は、前記吸着可能範囲内に前記第2廃棄物の吸着点が存在する場合、前記水平移動機構により前記吸着可能範囲内の前記第2廃棄物の吸着点に対応する位置に前記第2吸着部を移動させて、前記第2吸着部により前記第2廃棄物を吸着する制御を行う、請求項9に記載の廃棄物処理システム。
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボット用吸着ハンド、ロボットおよび廃棄物処理システムに関し、特に、廃棄物を吸着するロボット用吸着ハンド、ロボットおよび廃棄物処理システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、廃棄物を吸着するロボット用吸着ハンドが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、廃棄物を吸着するロボットハンドが開示されている。このロボットハンドは、ロボットアームの先端に取り付けられる回転体と、回転体に取り付けられるとともに廃棄物を吸着する複数の保持部とを備える。また、複数の保持部の各々は、回転体の回転軸の方向から見て、等間隔に放射状に配置されているとともに、回転体の回転軸に対して、外側に傾斜した姿勢で取り付けられている。このロボットハンドでは、まず、1つの保持部が1つ目の廃棄物を保持する。そして、1つの保持部が1つ目の廃棄物を保持した状態で、回転体が回転した後、他の保持部が、2つ目の廃棄物を保持する。このロボットハンドでは、複数の廃棄物を個別に連続的に吸着する。
【先行技術文献】
【特許文献】
【0004】
特開2022-90523号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に記載されたロボットハンドでは、複数の廃棄物を吸着して処理能力を向上させることが可能である一方、回転体を回転させながら複数の廃棄物を個別に連続的に吸着するため、2つ目以降の廃棄物を吸着する際に、吸着済みの廃棄物と次の吸着対象の廃棄物とが衝突するおそれがあるという問題点がある。
【0006】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、廃棄物同士が衝突することを回避することが可能で、かつ、複数の廃棄物を吸着して処理能力を向上させることが可能なロボット用吸着ハンド、ロボットおよび廃棄物処理システムを提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、この開示の第1の局面によるロボット用吸着ハンドは、廃棄物を吸着する第1吸着部と、第1吸着部の周りに配置され、廃棄物を吸着する第2吸着部と、第1吸着部に対して第2吸着部を相対的に水平方向に移動させる水平移動機構と、を備える。
【0008】
この開示の第1の局面によるロボット用吸着ハンドでは、第1吸着部に対して第2吸着部を相対的に水平方向に移動させる水平移動機構を設ける。これにより、水平移動機構により第1吸着部に対して第2吸着部を相対的に水平方向に移動させることにより、第1吸着部と第2吸着部との相対的な位置を変化させることができるので、別々の廃棄物を同時に吸着可能な位置に第1吸着部と第2吸着部とを配置させることができる。その結果、第1吸着部と第2吸着部とにより複数の廃棄物を同時に吸着することができるので、複数の廃棄物を個別に連続的に吸着する場合と異なり、吸着済みの廃棄物と次の吸着対象の廃棄物とが衝突することがない。これにより、廃棄物同士が衝突することを回避することが可能で、かつ、複数の廃棄物を吸着して処理能力を向上させることができる。また、ロボットが廃棄物同士が衝突したことに起因して動作を停止する構成である場合、第1の局面によるロボット用吸着ハンドでは、廃棄物同士が衝突することを回避することにより、ロボットの停止を回避することができる。
【0009】
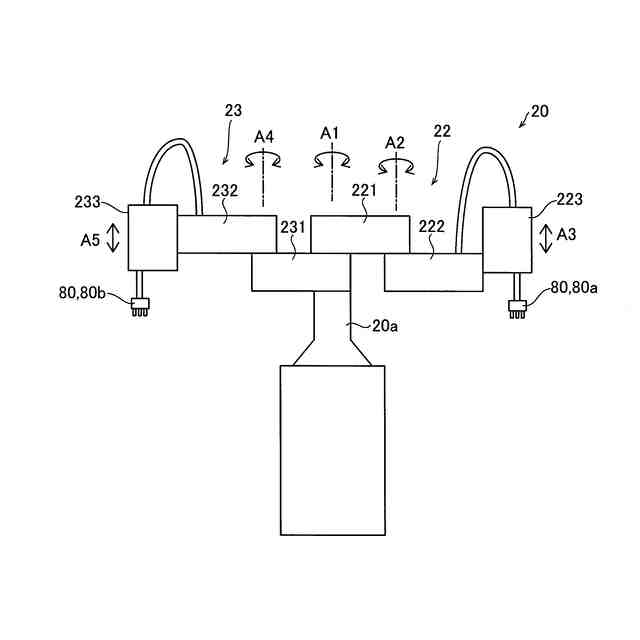
上記目的を達成するために、この開示の第2の局面によるロボットは、ロボットアームと、ロボットアームの先端に接続されたロボット用吸着ハンドと、を備え、ロボット用吸着ハンドは、廃棄物を吸着する第1吸着部と、第1吸着部の周りに配置され、廃棄物を吸着する第2吸着部と、第1吸着部に対して第2吸着部を相対的に水平方向に移動させる水平移動機構と、を含む。
【0010】
この開示の第2の局面によるロボットでは、第1吸着部に対して第2吸着部を相対的に水平方向に移動させる水平移動機構を設ける。これにより、水平移動機構により第1吸着部に対して第2吸着部を相対的に水平方向に移動させることにより、第1吸着部と第2吸着部との相対的な位置を変化させることができるので、別々の廃棄物を同時に吸着可能な位置に第1吸着部と第2吸着部とを配置させることができる。その結果、第1吸着部と第2吸着部とにより複数の廃棄物を同時に吸着することができるので、複数の廃棄物を個別に連続的に吸着する場合と異なり、吸着済みの廃棄物と次の吸着対象の廃棄物とが衝突することがない。これにより、廃棄物同士が衝突することを回避することが可能で、かつ、複数の廃棄物を吸着して処理能力を向上させることが可能なロボットを提供することができる。また、ロボットが廃棄物同士が衝突したことに起因して動作を停止する構成である場合、第2の局面によるロボットでは、廃棄物同士が衝突することを回避することにより、ロボットの停止を回避することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
4か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
3か月前
個人
スロットルトリガー
4か月前
中国電力株式会社
腰袋
7か月前
株式会社エビス
連結具
15日前
太陽工業株式会社
チャック装置
3か月前
コクヨ株式会社
補助器具
3か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
衝撃工具
6か月前
日東工器株式会社
動力工具
4か月前
個人
メンテナンス用スタンド
5か月前
川崎重工業株式会社
ロボット
29日前
CKD株式会社
把持装置
4か月前
トヨタ自動車株式会社
ロボット
4か月前
株式会社マキタ
電動工具
22日前
株式会社マキタ
打撃工具
1か月前
オムロン株式会社
電動把持工具
3か月前
株式会社マキタ
打撃工具
22日前
川崎重工業株式会社
罫書用治具
6か月前
株式会社マキタ
動力工具
7か月前
東京計器株式会社
接触検知装置
4か月前
学校法人立命館
グリッパ
3か月前
株式会社ダイヘン
搬送装置
7か月前
個人
容器引っ掛け棒およびその使用方法
5か月前
白山工業株式会社
ロボットアーム
4か月前
株式会社ダイヘン
搬送装置
7か月前
株式会社エビス
携帯付属物取付具
1か月前
トヨタ自動車株式会社
ハンド構造
6か月前
株式会社ハーモ
開閉チャック装置
5か月前
株式会社ダイヘン
制御装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
2か月前
個人
回転工具およびバリ取り部品
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































