TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024173104
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023091256
出願日
2023-06-01
発明の名称
一方向回転機構および往復回数依存型開閉機構
出願人
白山工業株式会社
代理人
個人
主分類
B66C
1/34 20060101AFI20241205BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】半導体部品を用いず、高放射線環境などの極限環境下でも確実に動作し、遠隔操作での玉掛け・玉外し作業が容易な自動着脱フックを提供する。
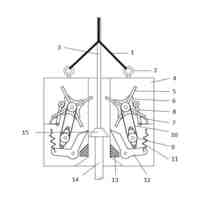
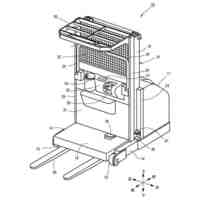
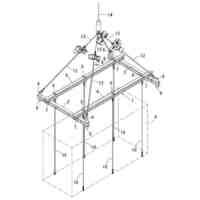
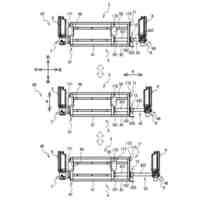
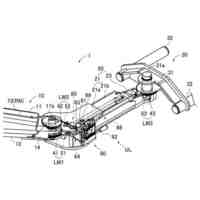
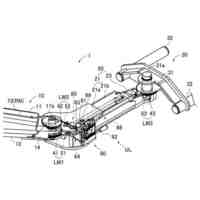
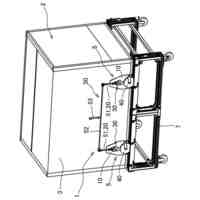
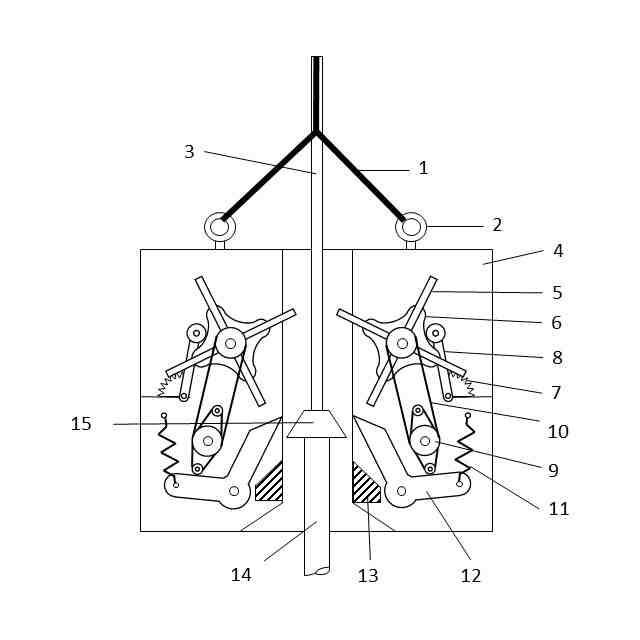
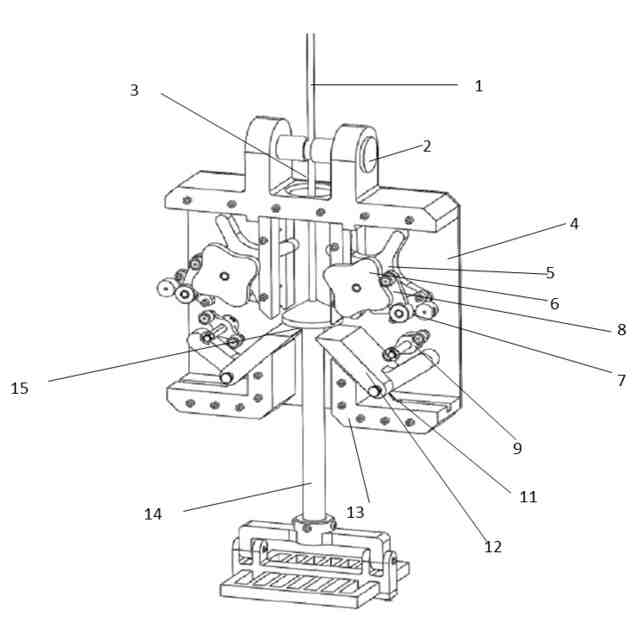
【解決手段】ワイヤ1と、吊り具2と、周期突起体5と、周期突起体5と同軸に固定されたカム6と、弾性要素7でカム6に圧接される加圧体8と、周期突起体5の運動を運動規制カム9に伝達する回転伝達機構10と、弾性要素11で周期突起体5に圧接される運動規制部材12と、ストッパ13と、往復運動体14と、往復運動体14に固定された爪部材15を備え、往復運動体14が行う往復運動のうち爪部材15が片方向から周期突起体5に接触する場合には、加圧体8がカム6の凸部を通過して隣の凹部に嵌るまでカム6を回転させ、逆方向から爪部材15が周期突起体5に接触する場合には、加圧体8がカムの凸部を通過しないで元の凹部に嵌る姿勢に戻るように構成する往復回数依存型開閉機構。
【選択図】図1
特許請求の範囲
【請求項1】
基台に回転自由に軸支され、放射状に突する周期突起体と;
爪部材を有し、直線往復運動をするように配置された、往復運動体と;
弾性力により前記周期突起体を直接または間接的に加圧し,周期突起体の回転を弾性エネルギーの安定平衡点でとどめる加圧体と;
を備え、
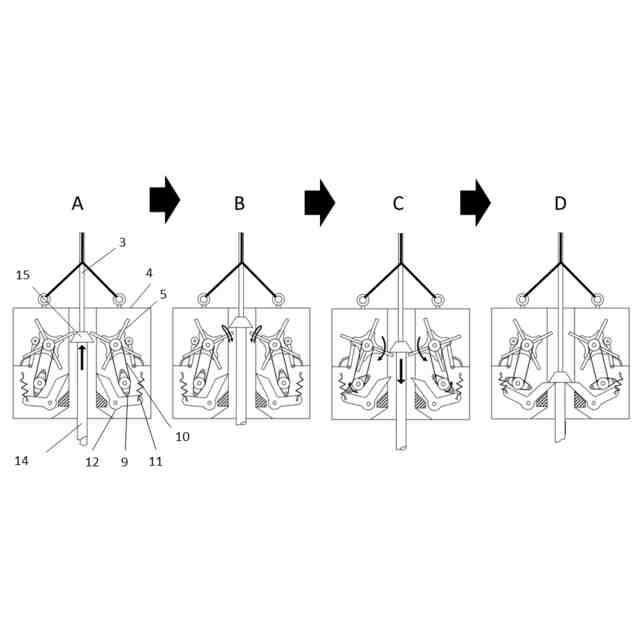
前記往復運動体が行う往復運動のうち前記爪部材が片方向から前記周期突起体に接触する場合は、前記周期突起体を隣接する安定平衡点まで回転させ、前記爪部材が逆方向から前記周期突起体に接触する場合は、前記周期突起体を反対方向に一定角度回転させるが、その後周期突起体がもとの安定平衡点に戻るように構成される、一方向回転機構。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の前記一方向回転機構において、
前記周期突起体と共に回転し、周囲が周期的な凹凸形状をなすカムと;
を更に備え、
前記往復運動体が行う往復運動体のうち、前記爪部材が片方向から前記周期突起体に接触する場合には、前記加圧体が前記カムの凸部を通過して隣の凹部に嵌るまで前記カムを回転させるが、前記往復運動体の往復運動のうち逆方向から前記爪部材が前記周期突起体に接触する場合には、前記加圧体が前記カムを通過しないで元の凹部に嵌る姿勢に戻るように構成される一方向回転機構。
【請求項3】
請求項1または2に記載の一方向回転機構と;
前記往復運動体の往復運動の最大振幅を越える動きを抑制または非抑制する運動規制機構と;
前記一方向回転機構の運動を前記運動規制機構に伝達する伝達機構と;を備え、
前記一方向回転機構が生成する一方向回転運動を、前記伝達機構を介して運動規制機構に伝達することで、前記往復運動体が往復運動の最大振幅地点を通過するか否かを切り替えるよう構成される往復回数依存型開閉機構。
【請求項4】
前記伝達機構が、前記運動規制機構を兼ねる、請求項3に記載の往復回数異存開閉機構。
【請求項5】
前記伝達機構が2軸間に回転を伝達する回転伝達機構であって;
前記運動規制機構が、
基台と回転自由に軸支される運動規制部材と;
前記運動規制部材に圧接される運動規制カムと;
を備える揺動型カム機構であって;
前記一方向回転機構の回転運動を前記回転伝達機構で前記運動規制カムを回転させ、前記運動規制カムに圧接される前記運動規制部材を揺動させることで、前記往復運動体が往復運動の最大振幅地点を通過するか否かを切り替えるよう構成される請求項3に記載の往復回数依存型開閉機構。
【請求項6】
請求項3の伝達機構が、一方向回転機構と運動規制機構それぞれと回転自在に連結される連結リンクであることを特徴とする請求項2に記載の往復回数依存型開閉機構。
【請求項7】
前記運動規制部材が、基台に回転自由に軸支され、前記ピンを摺動可能に軸支し、前記運動規制加圧体の圧接部に凹凸を有する部材であって;
前記周期突起体と;
前記往復運動体と;
前記爪部材と;
前記運動規制部材と;
弾性力により前記運動規制部材に圧接される運動規制加圧体と;
前記周期突起体の回転軸と平行に前記周期突起体に固定されたピンと;
を備え、
前記往復運動体が行う往復運動のうち前記爪部材が片方向から前記周期突起体に接触する場合には、前記運動抑制加圧体が前記運動規制部材の凸部を通過して前記運動規制部材を揺動させるが、前記往復運動体の往復運動のうち逆方向から前記爪部材が前記周期突起体に接触する場合には、前記運動規制加圧体が前記運動規制部材の凸部を通過しないで元の凹部に嵌る姿勢に戻るように構成される往復回数依存型開閉機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は往復運動体の往復運動を回転部品の一方向の間欠回転運動に変換する一方向回転機構と、該一方向回転機構を備え吊り具との着脱状態を吊り具の往復運動回数に応じて切り替えられる往復回数依存型開閉機構に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
原子力発電所の廃炉作業では、人が立ち入ることができない高放射線環境下でロボット等の作業機械を搬入・搬出する必要がある。原子力発電所内のクレーンを用いた機器の搬入・搬出作業では、クレーンへの玉掛け・玉外し作業を遠隔操作で行う必要がある。遠隔操作で玉掛を行える装置として、吊り具との着脱状態を遠隔操作で切り替えられる自動開閉フックが提案されている。
【0003】
例えば非特許文献1に開示された装置は、フックの開閉をサーボモータで制御し、吊り具との着脱状態を切り替えられる構成としている。特許文献1に開示された発明は、フックに引っかけた荷を吊り上げたときに生じる引張力をラックアンドピニオンで伝達し、フックを閉じる動作を受動的に行える構成としている。特許文献2および3に開示された発明は同引張力を4節リンク機構で伝達しフックを閉じる動作を受動的に行える構成としている。
【先行技術文献】
【特許文献】
【0004】
WO2014/206859
特開2005-187148
特開2005-187149
【非特許文献】
【0005】
“Lifting Hooks For Cranes”、 [online]、 Elebia Autohooks、 SLU、 [令和4年11月30日検索]、インターネット<URL:https://elebia.com/lifting-hooks-for-cranes/>
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、非特許文献1に開示された装置の場合、高放射線環境下においてサーボ系を制御するための半導体部品が誤動作または破損する恐れがある。一方、特許文献1、特許文献2および特許文献3に開示された発明の場合、半導体部品を用いないため高放射線下でも確実に動作することが期待される。しかし、遠隔操作でフックに荷を引っかける操作が難しい。
【0007】
そこで、本発明は、荷に取り付けた吊り具との往復運動回数に応じて半導体部品を用いずに機構の状態を切り替えられる一方向回転機構と、前記一方向回転機構によって吊り具との拘束・非拘束状態を切り替えられ、遠隔での玉掛および玉外作業が容易な自動開閉フックの実現を可能とする往復回数依存型開閉機構を提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明の第1の様態に係る一方向回転機構は、
基台に回転自在に軸支され、放射状に突する周期突起体と、;
爪部材を有し、直線往復運動をするように配置された、往復運動体と、;
弾性力により周期突起体を直接または間接的に加圧し、周期突起体の回転を弾性エネルギーの安定平衡点でとどめる加圧体と、;を備え、
往復運動体が行う往復運動のうち、爪部材が片方向から周期突起体に接触する場合は、周期突起体を別の安定平衡点まで回転させ、爪部材が逆方向から周期突起体に接触する場合は、周期突起体を反対方向に一定角度回転させるが、その後周期突起体がもとの安定平衡点に戻るように構成される、一方向回転機構である。
【0009】
また、本発明の第1の態様において、一方向回転機構は、
周期突起体と共に回転し、周囲が周期的な凹凸形状をなすカムと、を更にそなえ、
往復運動体が行う往復運動のうち爪部材が片方向から周期突起体に接触する場合には、加圧体がカムの凸部を通過して隣の凹部に嵌るまでカムを回転させるが、往復運動体の往復運動のうち逆方向から爪部材が周期突起体に接触する場合には、加圧体がカムの凸部を通過しないで元の凹部に嵌る姿勢に戻るように構成される一方向回転機構である。
【0010】
また,本発明の第2の様態は、本発明に係る一方向回転機構を備える往復回数依存型開閉機構であって、
上記の一方向回転機構と;
往復運動体の往復運動の最大振幅を越える動きを抑制または非抑制する運動規制機構と;
一方向回転機構の運動を前記運動規制機構に伝達する伝達機構と;を備え、
一方向回転機構が生成する一方向回転運動を、伝達機構を介して運動規制機構に伝達することで、往復運動体が往復運動の最大振幅地点を通過するか否かを切り替えるよう構成される往復回数依存型開閉機構である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
白山工業株式会社
一方向回転機構および往復回数依存型開閉機構
1か月前
個人
懸吊装置
4か月前
ユニパルス株式会社
吊具
7か月前
個人
海上コンテナ昇降装置
1か月前
ユニパルス株式会社
吊具装置
2か月前
ユニパルス株式会社
荷役装置
21日前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
6日前
株式会社豊田自動織機
産業車両
2か月前
株式会社豊田自動織機
荷役車両
1か月前
ユニパルス株式会社
荷役助力装置
9か月前
株式会社日本キャリア工業
昇降機
5か月前
個人
建築部材の吊り上げ装置
3か月前
フジテック株式会社
エレベータ
13日前
大同特殊鋼株式会社
治具
10か月前
株式会社大林組
養生方法
4か月前
株式会社豊田自動織機
フォークリフト
6か月前
株式会社ニシキ
可変型吊り天秤
8か月前
ブラザー工業株式会社
架台
7か月前
ウエダ産業株式会社
鋼板保持装置
5か月前
有限会社サエキ
玉掛用器具
1か月前
小野谷機工株式会社
ジャッキ装置
7か月前
ブラザー工業株式会社
架台
7か月前
株式会社キトー
吊具
4か月前
株式会社タダノ
高所作業車
3か月前
白山工業株式会社
腕重量補償機構
3か月前
株式会社スギヤス
車両整備用リフト
1か月前
株式会社スギヤス
車両整備用リフト
1か月前
株式会社タダノ
クレーン装置
7か月前
ダイハツ工業株式会社
荷箱移動装置
8か月前
株式会社慧泉
搬送装置
7か月前
株式会社キトー
巻上機
6か月前
株式会社タダノ
クレーン装置
23日前
株式会社大林組
作業システム
4か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ