TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024172986
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023091083
出願日
2023-06-01
発明の名称
予測精度評価方法及び予測精度評価システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/16 20060101AFI20241205BHJP(信号)
要約
【課題】移動体に搭載されたセンサを用いることによって検出される障害物の将来位置の予測精度を評価する。
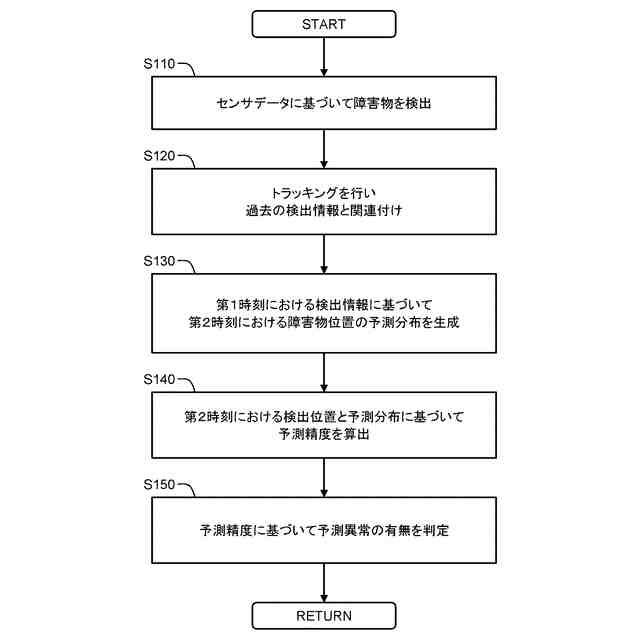
【解決手段】予測精度評価方法は、(A)移動体に搭載されたセンサを用いることによって検出される障害物の検出位置、検出速度、検出位置の誤差範囲、及び検出速度の誤差範囲を示す検出情報を取得することと、(B)第1時刻における検出情報である第1検出情報に基づいて、第1時刻よりも後の第2時刻における障害物の位置の予測分布を生成する予測分布生成処理と、(C)第2時刻における障害物の検出位置である第2検出位置と予測分布とに基づいて、予測分布に異常があるか否かを判定する予測異常判定処理と、を含む。
【選択図】図2
特許請求の範囲
【請求項1】
コンピュータによって実行される予測精度評価方法であって、
移動体に搭載されたセンサを用いることによって検出される障害物の検出位置、検出速度、前記検出位置の誤差範囲、及び前記検出速度の誤差範囲を示す検出情報を取得することと、
第1時刻における前記検出情報である第1検出情報に基づいて、前記第1時刻よりも後の第2時刻における前記障害物の位置の予測分布を生成する予測分布生成処理と、
前記第2時刻における前記障害物の前記検出位置である第2検出位置と前記予測分布とに基づいて、前記予測分布に異常があるか否かを判定する予測異常判定処理と
を含む
予測精度評価方法。
続きを表示(約 890 文字)
【請求項2】
前記第2検出位置と前記予測分布とを対比することによって、前記予測分布の精度を算出する予測精度算出処理を更に含み、
前記予測異常判定処理は、前記予測分布の前記精度が所定レベルを下回る場合、前記予測分布に異常があると判定することを含む
請求項1に記載の予測精度評価方法。
【請求項3】
前記予測精度算出処理は、
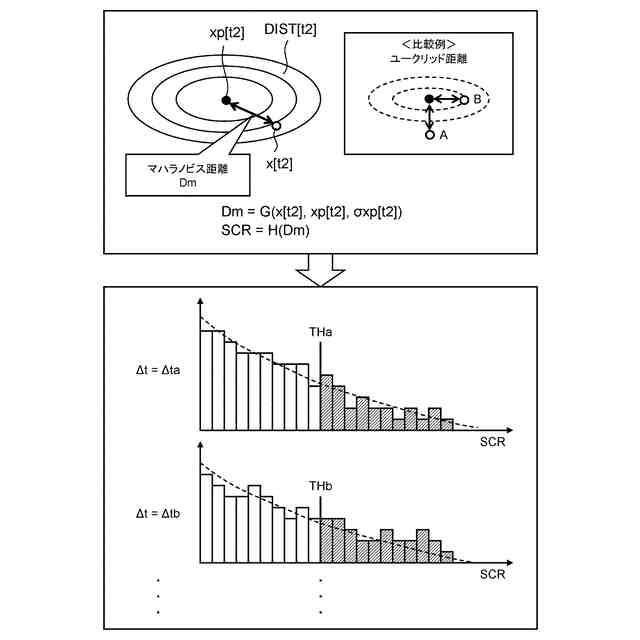
前記予測分布の中心位置と前記第2検出位置との間のマハラノビス距離を算出することと、
前記予測分布の前記精度を表す指標として、前記マハラノビス距離が大きくなるほど増加する評価値を取得することと
を含み、
前記予測異常判定処理は、前記評価値に基づいて行われる
請求項2に記載の予測精度評価方法。
【請求項4】
前記予測異常判定処理は、
前記第1時刻から前記第2時刻までの経過時間毎に、前記評価値のヒストグラムを生成することと、
前記ヒストグラムにおいて前記評価値が閾値を超えるサンプルの数あるいは割合を異常度として取得することと、
前記異常度が異常度閾値を超える場合、前記予測分布に異常があると判定することと
を含む
請求項3に記載の予測精度評価方法。
【請求項5】
1又は複数のプロセッサを備え、
前記1又は複数のプロセッサは、
移動体に搭載されたセンサを用いることによって検出される障害物の検出位置、検出速度、前記検出位置の誤差範囲、及び前記検出速度の誤差範囲を示す検出情報を取得することと、
第1時刻における前記検出情報である第1検出情報に基づいて、前記第1時刻よりも後の第2時刻における前記障害物の位置の予測分布を生成する予測分布生成処理と、
前記第2時刻における前記障害物の前記検出位置である第2検出位置と前記予測分布とに基づいて、前記予測分布に異常があるか否かを判定する予測異常判定処理と
を実行するように構成された
予測精度評価システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体に搭載されたセンサを用いることによって検出される障害物の将来位置の予測精度を評価する技術に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1は、車両を制御するシステムを開示している。システムは、車載センサを用いて車両周囲の物体を検出する。更に、システムは、検出位置における過去の物体挙動データに基づいて、検出物体の将来の挙動を予測する。そして、システムは、検出物体の予測された将来の挙動に基づいて、自動運転の制御計画を設定する。
【先行技術文献】
【特許文献】
【0003】
特許第6051162号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術によれば、車載センサを用いることによって検出される物体の将来の挙動が予測される。但し、その予測精度が低い場合、予測結果に基づく自動運転制御の精度も低下する。
【0005】
本開示の1つの目的は、移動体に搭載されたセンサを用いることによって検出される障害物の将来位置の予測精度を評価することができる技術を提供することにある。
【課題を解決するための手段】
【0006】
第1の観点は、コンピュータによって実行される予測精度評価方法に関連する。
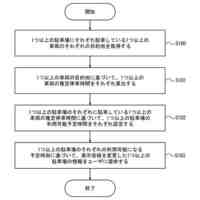
予測精度評価方法は、
移動体に搭載されたセンサを用いることによって検出される障害物の検出位置、検出速度、検出位置の誤差範囲、及び検出速度の誤差範囲を示す検出情報を取得することと、
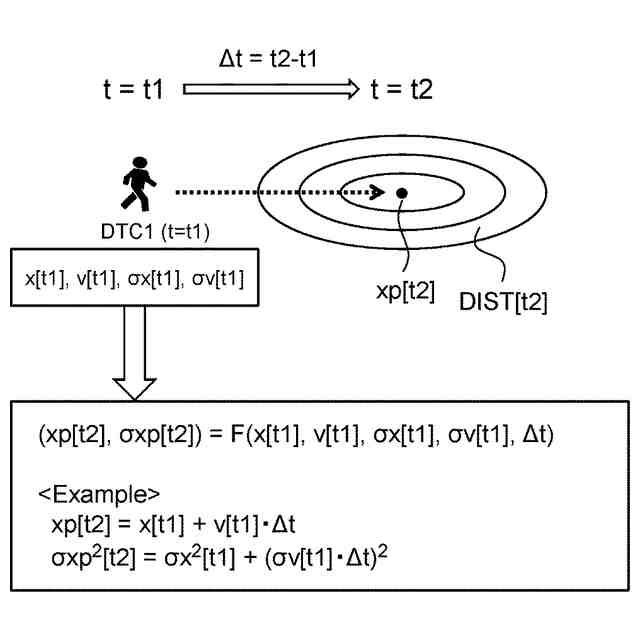
第1時刻における検出情報である第1検出情報に基づいて、第1時刻よりも後の第2時刻における障害物の位置の予測分布を生成する予測分布生成処理と、
第2時刻における障害物の検出位置である第2検出位置と予測分布とに基づいて、予測分布に異常があるか否かを判定する予測異常判定処理と
を含む。
【0007】
第2の観点は、予測精度評価システムに関連する。
予測精度評価システムは、1又は複数のプロセッサを備える。
1又は複数のプロセッサは、移動体に搭載されたセンサを用いることによって検出される障害物の検出位置、検出速度、検出位置の誤差範囲、及び検出速度の誤差範囲を示す検出情報を取得する。
1又は複数のプロセッサは、第1時刻における検出情報である第1検出情報に基づいて、第1時刻よりも後の第2時刻における障害物の位置の予測分布を生成する予測分布生成処理を実行する。
1又は複数のプロセッサは、第2時刻における障害物の検出位置である第2検出位置と予測分布とに基づいて、予測分布に異常があるか否かを判定する予測異常判定処理を実行する。
【発明の効果】
【0008】
本開示によれば、移動体に搭載されたセンサを用いることによって検出される障害物の将来位置の予測精度を評価することが可能となる。特に、本開示によれば、第1時刻における第1検出情報に基づいて、第1時刻よりも後の第2時刻における障害物の位置の予測分布が生成される。そして、第2時刻における障害物の第2検出位置と予測分布とに基づいて、予測分布に異常が有るか否かが判定される。単なる予測位置ではなく予測分布も考慮することによって、予測精度をより高精度に評価することが可能となる。
【図面の簡単な説明】
【0009】
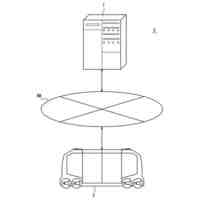
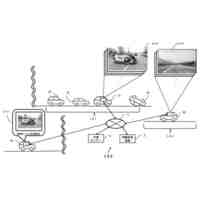
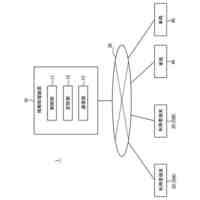
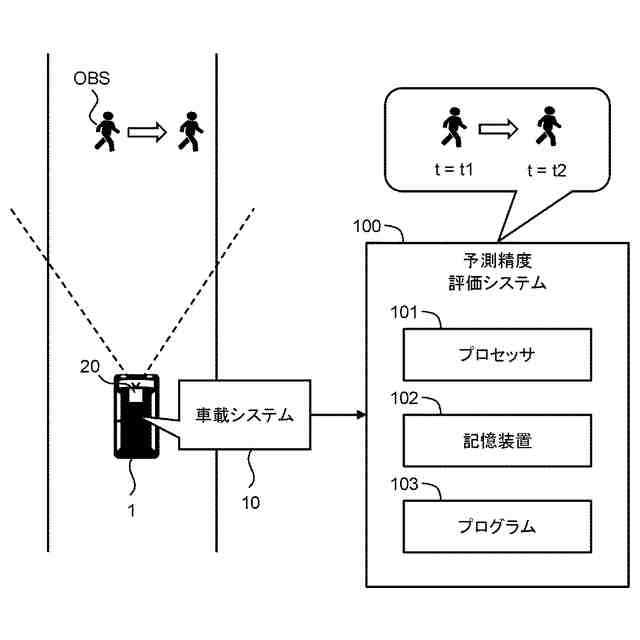
実施の形態の概要を説明するための概念図である。
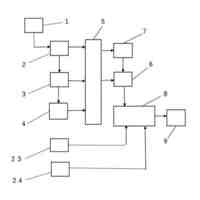
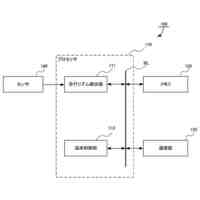
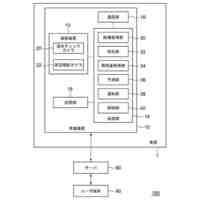
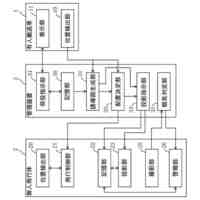
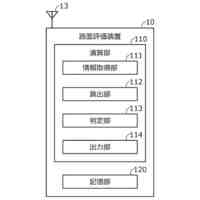
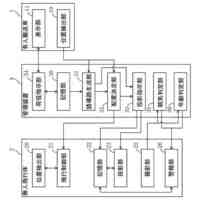
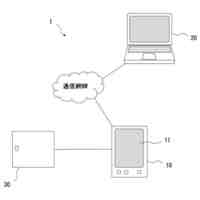
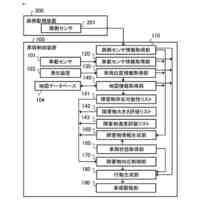
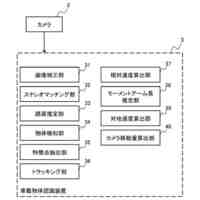
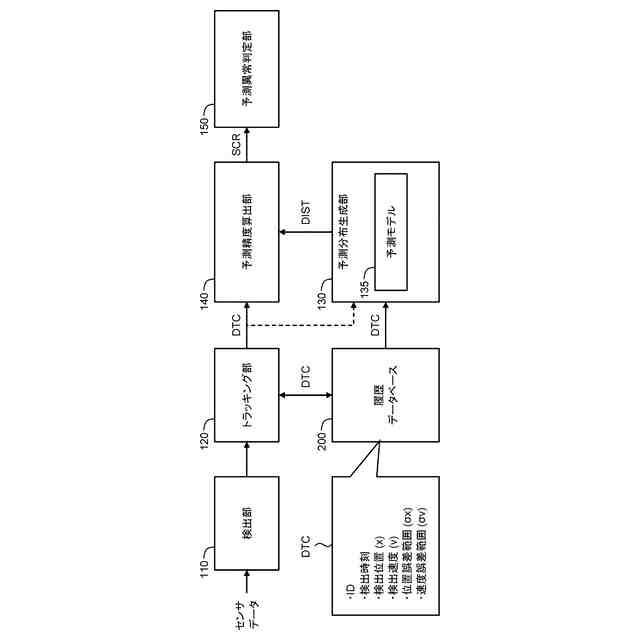
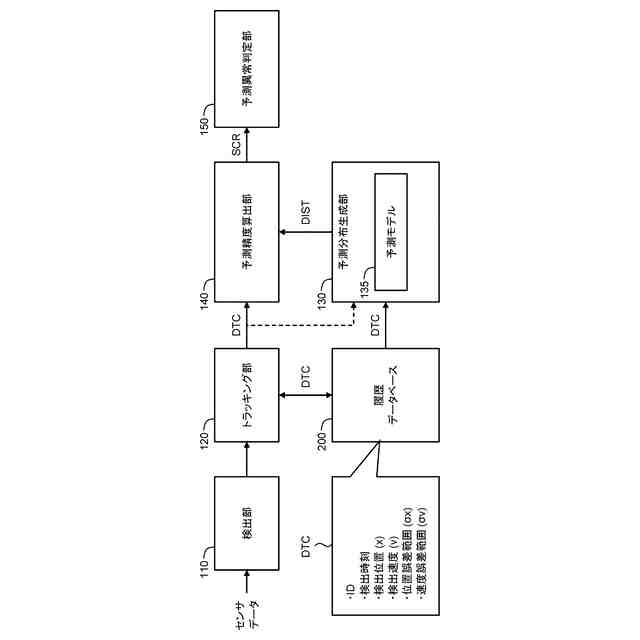
予測精度評価システムの機能構成例を示すブロック図である。
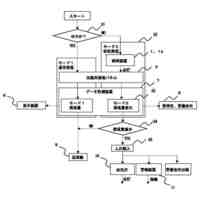
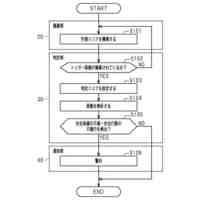
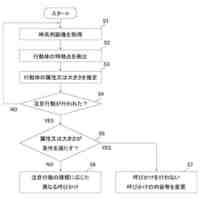
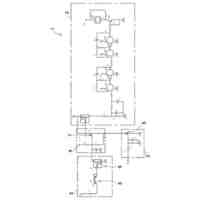
予測精度評価処理を示すフローチャートである。
予測分布生成処理の例を説明するための概念図である。
予測精度算出処理及び予測異常判定処理を説明するための概念図である。
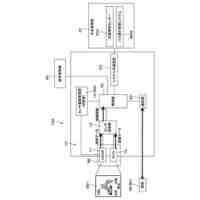
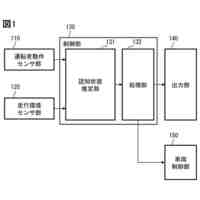
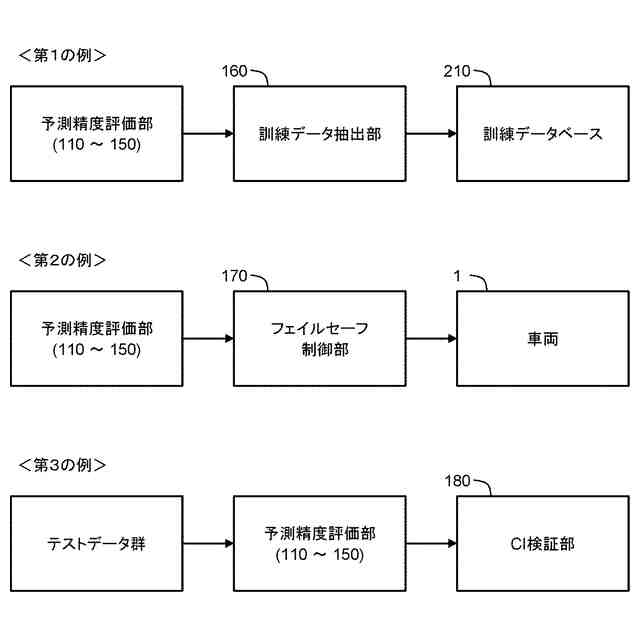
予測精度評価システムの応用例を説明するためのブロック図である。
【発明を実施するための形態】
【0010】
1.概要
本実施の形態に係る技術は移動体に適用される。移動体としては、車両、ロボット、等が例示される。車両は、自動運転車両であってもよいし、ドライバが運転する車両であってもよい。ロボットとしては、物流ロボット、作業ロボット、等が例示される。一例として、以下の説明においては、移動体が車両である場合について考える。一般化する場合には、以下の説明における「車両」を「移動体」で読み替えるものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
1日前
個人
黄色点滅式信号機
1か月前
個人
空飛ぶ自動車の空路
1か月前
個人
出会い頭事故防止装置
19日前
個人
忘れ物検出装置
22日前
能美防災株式会社
発信機
1日前
株式会社島津製作所
警報装置
26日前
日本信号株式会社
情報管理システム
19日前
ホーチキ株式会社
監視システム
7日前
株式会社SUBARU
車速制御システム
22日前
合同会社ORIC-LAB
太陽光発電管理装置
28日前
株式会社JVCケンウッド
通知システム
5日前
タック株式会社
安全監視システム
5日前
三菱ロジスネクスト株式会社
搬送システム
1日前
三菱ロジスネクスト株式会社
搬送システム
1日前
株式会社アジラ
注目行動呼びかけシステム
今日
三菱ロジスネクスト株式会社
搬送システム
1日前
本田技研工業株式会社
路面評価装置
27日前
日本信号株式会社
路側装置及びセンサ装置
8日前
本田技研工業株式会社
路面評価装置
27日前
三菱ロジスネクスト株式会社
搬送システム
1日前
株式会社デンソー
運転支援装置
13日前
河村電器産業株式会社
警報装置
21日前
トヨタ自動車株式会社
車両
今日
株式会社 ミックウェア
情報処理装置、情報処理方法
19日前
株式会社知財事業研究所
運行計画作成システム
27日前
トヨタ自動車株式会社
方法
12日前
エムケー精工株式会社
信号機および信号機の発光制御方法
13日前
日本宅配システム株式會社
入館管理システム
1か月前
本田技研工業株式会社
運転支援システム
27日前
トヨタ自動車株式会社
システム
1か月前
トヨタ自動車株式会社
情報処理装置
7日前
個人
除排雪判断支援システムおよびプログラム、道路管理方法
5日前
三菱電機株式会社
車両制御装置
16日前
日立Astemo株式会社
車載物体認識装置
1か月前
能美防災株式会社
音響装置及びその設置構造
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ