TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024171816
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023089058
出願日
2023-05-30
発明の名称
ロボットシステムおよびロボットシステムの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
15/06 20060101AFI20241205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数の吸着部のうちからワークを吸着するための吸着部を選択する制御部の制御負荷を軽減することが可能なロボットシステムを提供する。
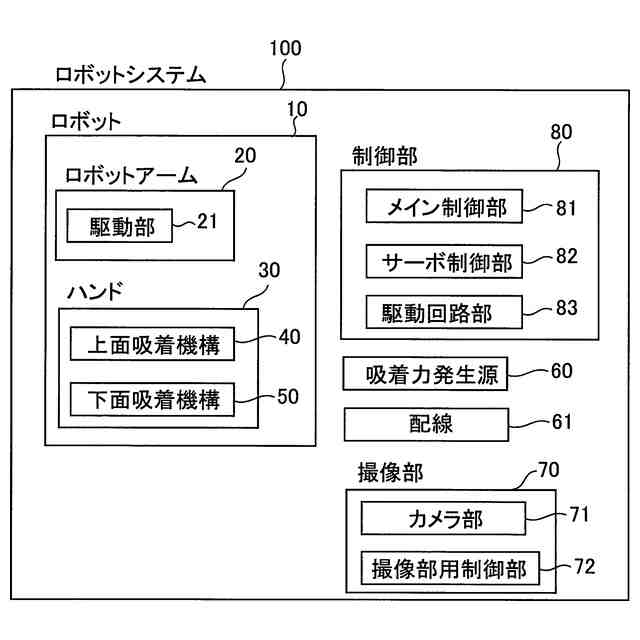
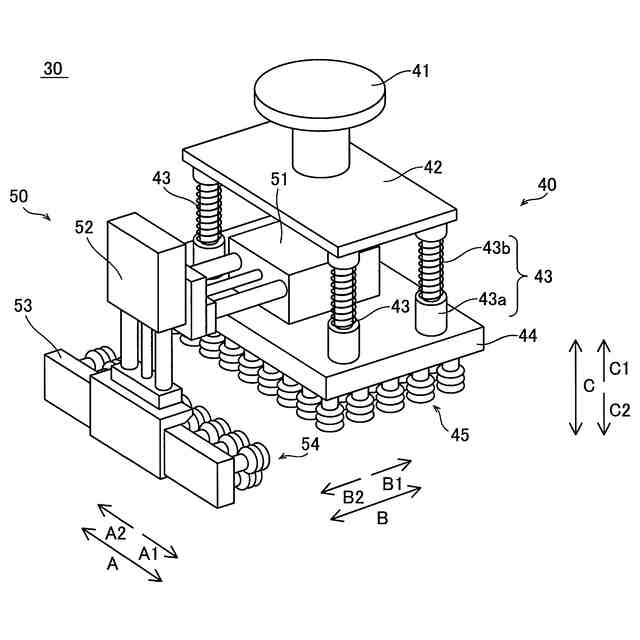
【解決手段】このロボットシステム100は、ロボットアーム20と、ワーク200の上面201を吸着する複数の上面吸着部45と、ワーク200の側面202を吸着する複数の側面吸着部54と、を含み、ロボットアーム20に取り付けられるハンド30と、複数の上面吸着部45および複数の側面吸着部54の吸着力を発生させる複数の吸着力発生源60と、複数の上面吸着部45のうちから選択した上面吸着部45と、選択した上面吸着部45に対応する側面吸着部54とに共通の吸着力発生源60を制御する制御部80と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
ロボットアームと、
ワークの上面を吸着する複数の上面吸着部と、前記ワークの側面を吸着する複数の側面吸着部と、を含み、前記ロボットアームに取り付けられるハンドと、
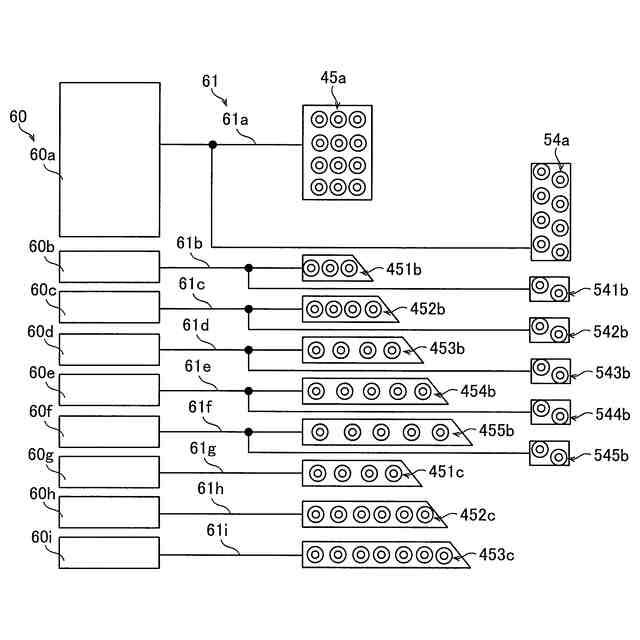
前記複数の上面吸着部および前記複数の側面吸着部の吸着力を発生させる複数の吸着力発生源と、
前記複数の上面吸着部のうちから選択した前記上面吸着部と、選択した前記上面吸着部に対応する前記側面吸着部とに共通の前記吸着力発生源を制御する制御部と、を備える、ロボットシステム。
続きを表示(約 1,600 文字)
【請求項2】
前記制御部は、共通の前記吸着力発生源に、共通の配管または共通の配線を介して接続された前記上面吸着部と前記側面吸着部とにより前記ワークを吸着する制御を実行する、請求項1に記載のロボットシステム。
【請求項3】
前記複数の上面吸着部は、
第1上面吸着部と、
前記第1上面吸着部に対して、第1方向に隣り合うように配置される第2上面吸着部と、を含み、
前記複数の側面吸着部は、
第1側面吸着部と、
前記第1側面吸着部に対して、前記第1方向に隣り合うように配置される第2側面吸着部と、を含み、
前記制御部は、
共通の前記吸着力発生源に接続されている前記第1上面吸着部と前記第1側面吸着部とにより前記ワークを吸着する制御を実行し、
共通の前記吸着力発生源に接続されている前記第2上面吸着部と前記第2側面吸着部とにより前記ワークを吸着する制御を実行する、請求項1に記載のロボットシステム。
【請求項4】
前記第2上面吸着部は、前記第1方向に沿って複数配置され、
前記第2側面吸着部は、複数の前記第2上面吸着部に対応するように前記第1方向に沿って複数配置されている、請求項3に記載のロボットシステム。
【請求項5】
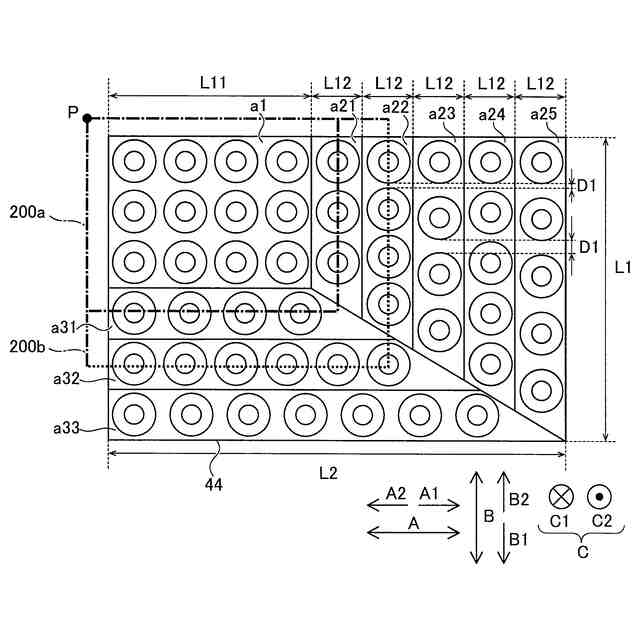
前記第1上面吸着部および前記第2上面吸着部は、各々、前記ワークを吸着する複数の吸着パッドを含み、
前記複数の第2上面吸着部の各々の、前記複数の吸着パッドが配置される配置領域の、前記第1方向に直交する第2方向の長さは互いに異なり、
互いに前記第2方向の長さが異なる前記配置領域に配置される前記吸着パッドの数は同じであるとともに、前記第2方向の長さが大きい前記配置領域に配置される前記吸着パッド同士の間隔は、前記第2方向の長さが小さい前記配置領域に配置される前記吸着パッド同士の間隔よりも大きい、請求項4に記載のロボットシステム。
【請求項6】
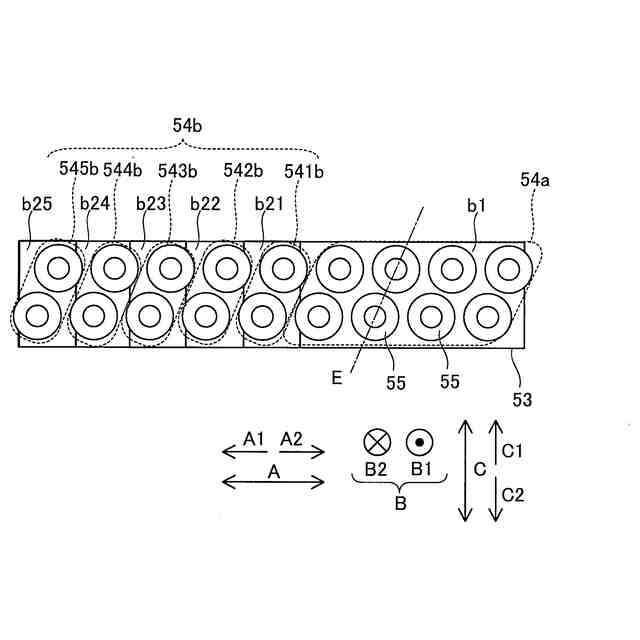
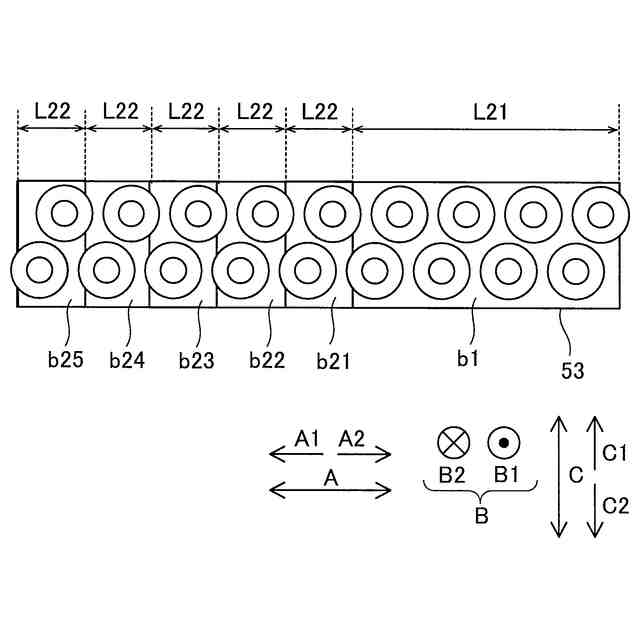
前記第1側面吸着部および前記第2側面吸着部は、各々、前記ワークを吸着する複数の吸着パッドを含み、
前記第1側面吸着部および前記第2側面吸着部に含まれる前記複数の吸着パッドは、前記第1方向および前記第2方向に対して直交する第3方向に交差する方向に並んで配置されている、請求項5に記載のロボットシステム。
【請求項7】
前記第1方向において、前記第1上面吸着部の前記複数の吸着パッドが配置される配置領域の長さは、前記第1側面吸着部の前記複数の吸着パッドが配置される配置領域の長さに対応し、
前記第1方向において、前記第2上面吸着部の前記複数の吸着パッドが配置される配置領域の長さは、前記第2側面吸着部の前記複数の吸着パッドが配置される配置領域の長さに対応している、請求項3に記載のロボットシステム。
【請求項8】
前記複数の上面吸着部は、前記第1上面吸着部に対して、前記第1方向に直交する第2方向に隣り合うように配置され、前記上面吸着部および前記側面吸着部に接続される前記吸着力発生源とは異なる吸着力発生源に接続される第3上面吸着部を含み、
前記制御部は、前記第3上面吸着部の吸着を、前記第1上面吸着部、前記第2上面吸着部、前記第1側面吸着部および前記第2側面吸着部とは別個に制御する、請求項3に記載のロボットシステム。
【請求項9】
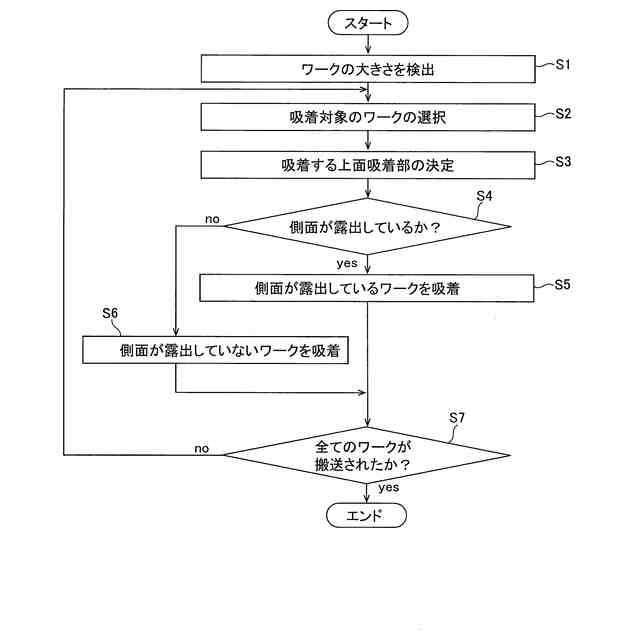
前記制御部は、前記ワークの大きさに応じて、前記ワークを吸着する前記上面吸着部を選択する、請求項1に記載のロボットシステム。
【請求項10】
前記ワークの大きさを検出する検出部を備え、
前記制御部は、前記検出部に検出された前記ワークの大きさに基づいて、前記複数の上面吸着部のうちいずれの前記上面吸着部により前記ワークを吸着するのかを決定する、請求項9に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットシステムおよびロボットシステムの制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、ワークを吸着する吸着部を備えるロボットシステムが知られている。特許文献1には、ワークの上面を吸着する複数の第1の吸着パッドと、ワークの側面を吸着する複数の第2の吸着パッドと、制御部と、を備える荷役装置が開示されている。特許文献1では、制御部は、複数の荷物のうちから選択された荷物の上面の大きさに基づいて、複数の第1の吸着パッドのうちからワークの上面を吸着する第1の吸着パッドを選択する。また、制御部は、選択された荷物の側面の大きさに基づいて、複数の第2の吸着パッドのうちからワークの側面を吸着する第2の吸着パッドを選択する。
【先行技術文献】
【特許文献】
【0003】
特許第6668417号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、制御部が第1の吸着パッドを選択する制御と第2の吸着パッドを選択する制御とを個別に実行しているため、制御部の制御負荷が増加するという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、複数の吸着部のうちからワークを吸着するための吸着部を選択する制御部の制御負荷を軽減することが可能なロボットシステムおよびロボットシステムの制御方法を提供することである。
【課題を解決するための手段】
【0006】
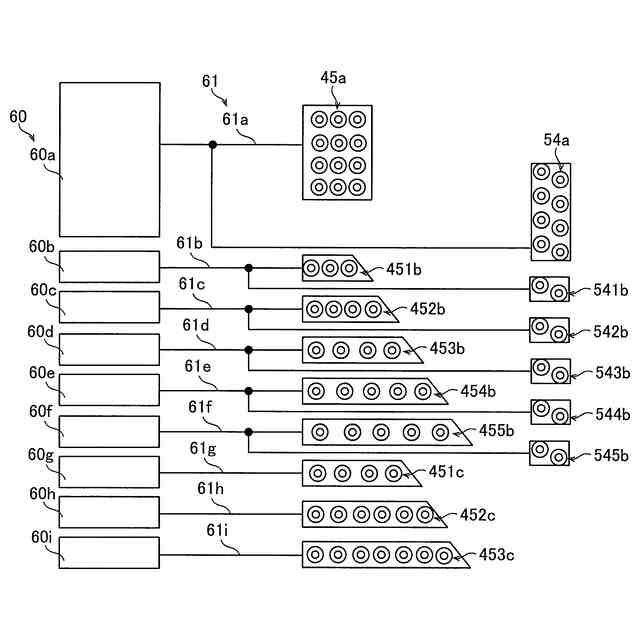
この開示の第1の局面によるロボットシステムは、ロボットアームと、ワークの上面を吸着する複数の上面吸着部と、ワークの側面を吸着する複数の側面吸着部と、を含み、ロボットアームに取り付けられるハンドと、複数の上面吸着部および複数の側面吸着部の吸着力を発生させる複数の吸着力発生源と、複数の上面吸着部のうちから選択した上面吸着部と、選択した上面吸着部に対応する側面吸着部とに共通の吸着力発生源を制御する制御部と、を備える。
【0007】
この開示の第1の局面によるロボットシステムは、上記のように、ロボットアームに取り付けられるハンドと、複数の上面吸着部および複数の側面吸着部の吸着力を発生させる複数の吸着力発生源と、複数の上面吸着部のうちから選択した上面吸着部と、選択した上面吸着部に対応する側面吸着部とに共通の吸着力発生源を制御する制御部と、を備える。これにより、制御部が複数の上面吸着部のうちからワークを吸着する上面吸着部を選択するだけで、選択された上面吸着部と共通の吸着力発生源により吸着力が発生される側面吸着部が自動的に選択される。このため、側面吸着部を選択する制御を実行する必要がないので、複数の吸着部のうちからワークを吸着するための吸着部を選択する制御部の制御負荷を軽減できる。
【0008】
この開示の第2の局面によるロボットシステムの制御方法は、ロボットアームに取り付けられるハンドに含まれる、ワークの上面を吸着する複数の上面吸着部のうちから、ワークを吸着する上面吸着部を選択することと、選択した上面吸着部と、ハンドに含まれる複数の側面吸着部のうち、選択した上面吸着部に対応する側面吸着部とに共通の吸着力発生源を制御することにより、ワークを吸着することと、を備える。
【0009】
この開示の第2の局面によるロボットシステムの制御方法は、上記のように、選択した上面吸着部と、ハンドに含まれる複数の側面吸着部のうち、選択した上面吸着部に対応する側面吸着部とに共通の吸着力発生源を制御することにより、ワークを吸着することを備える。これにより、制御部が複数の上面吸着部のうちからワークを吸着する上面吸着部を選択するだけで、選択された上面吸着部と共通の吸着力発生源により吸着力が発生される側面吸着部が自動的に選択される。このため、側面吸着部を選択する制御を実行する必要がないので、複数の吸着部のうちからワークを吸着するための吸着部を選択する制御部の制御負荷を軽減することが可能なロボットシステムの制御方法を提供できる。
【発明の効果】
【0010】
本開示によれば、複数の吸着部のうちからワークを吸着するための吸着部を選択する制御部の制御負荷を軽減することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
4か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
3か月前
個人
スロットルトリガー
4か月前
日東精工株式会社
搬送装置
8か月前
中国電力株式会社
腰袋
7か月前
株式会社エビス
連結具
15日前
株式会社ツノダ
挟持工具
9か月前
太陽工業株式会社
チャック装置
3か月前
コクヨ株式会社
補助器具
3か月前
日東工器株式会社
衝撃工具
6か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
株式会社右川ゴム製造所
把持装置
8か月前
川崎重工業株式会社
ロボット
29日前
個人
メンテナンス用スタンド
5か月前
株式会社マキタ
打撃工具
1か月前
オムロン株式会社
電動把持工具
3か月前
川崎重工業株式会社
罫書用治具
6か月前
学校法人立命館
グリッパ
3か月前
トヨタ自動車株式会社
ロボット
4か月前
CKD株式会社
把持装置
4か月前
株式会社マキタ
打撃工具
22日前
株式会社マキタ
電動工具
22日前
株式会社マキタ
動力工具
7か月前
東京計器株式会社
接触検知装置
4か月前
個人
回転工具およびバリ取り部品
4か月前
株式会社ダイヘン
搬送装置
2か月前
個人
容器引っ掛け棒およびその使用方法
5か月前
個人
プーリーキー抜き治具
9か月前
株式会社ダイヘン
搬送装置
7か月前
株式会社マキタ
電動ハンマ
2か月前
株式会社ハーモ
開閉チャック装置
5か月前
白山工業株式会社
ロボットアーム
4か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































