TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024171607
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023088705
出願日
2023-05-30
発明の名称
ピッキングシステム
出願人
株式会社日立製作所
代理人
弁理士法人信友国際特許事務所
主分類
B25J
15/06 20060101AFI20241205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】様々なサイズや形状の物品に対しても安定して搬送することができるピッキングシステムを提供する。
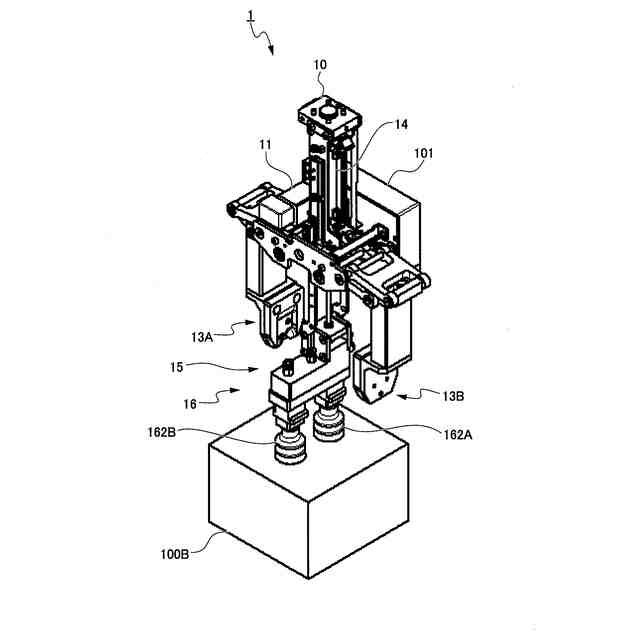
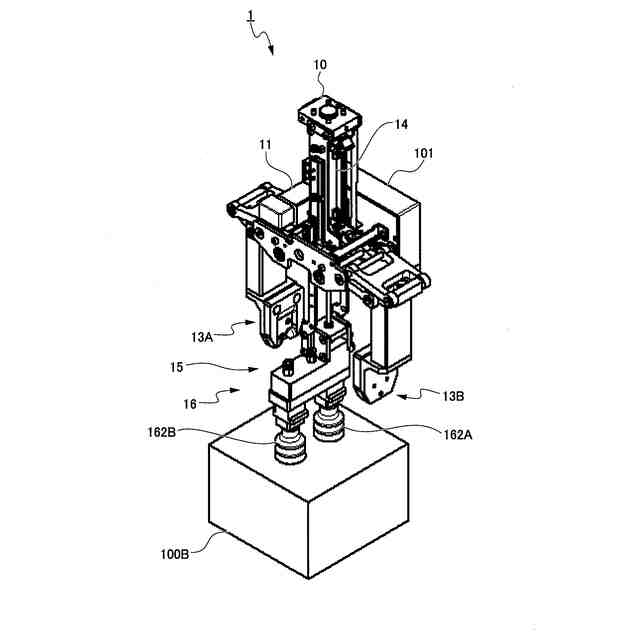
【解決手段】ピッキングシステムは、搬送ロボットと、ロボットハンド1と、制御装置と、を備えている。ロボットハンド1は、物品を把持する把持部13A、13Bと、物品を吸着する吸着パッド162A、162Bを複数有する吸着ユニット16と、を備えている。制御装置は、把持部13A、13bによる把持と吸着ユニット16による吸着で物品を保持する第1搬送モードと、吸着ユニット16による吸着で物品を保持する第2搬送モードを有している。制御装置は、物品に応じて、第1搬送モードと第2搬送モードを切り替える。
【選択図】図2
特許請求の範囲
【請求項1】
物品を搬送する搬送ロボットと、
前記搬送ロボットに設けられたロボットハンドと、
前記ロボットハンドを制御する制御装置と、を備え、
前記ロボットハンドは、
前記物品を把持する把持部と、
前記物品を吸着する吸着パッドを複数有する吸着ユニットと、を備え、
前記制御装置は、前記把持部による把持と前記吸着ユニットによる吸着で前記物品を保持する第1搬送モードと、前記吸着ユニットによる吸着で前記物品を保持する第2搬送モードを有し、
前記制御装置は、前記物品に応じて、前記第1搬送モードと前記第2搬送モードを切り替える
ピッキングシステム。
続きを表示(約 840 文字)
【請求項2】
前記制御装置は、前記物品に応じて、前記把持部による把持のみで前記物品を保持する第3搬送モードを有し、
前記制御装置は、前記物品に応じて、前記第1搬送モード及び前記第2搬送モード、前記第3搬送モードを切り替える
請求項1に記載のピッキングシステム。
【請求項3】
前記吸着ユニットは、複数の前記吸着パッドのうち少なくとも1つの前記吸着パッドで前記物品を吸着する搬送モードと、複数の前記吸着パッドで前記物品を吸着する搬送モードとを有する
請求項1に記載のピッキングシステム。
【請求項4】
前記把持部は、互いに接近及び離反する2つの指先部を有し、
複数の前記吸着パッドは、前記把持部における2つの前記指先部の開閉方向と直交する方向に並べて配置される
請求項1に記載のピッキングシステム。
【請求項5】
複数の前記吸着パッドのうち少なくとも1つの吸着パッドは、2つの前記指先部の間に配置される
請求項4に記載のピッキングシステム。
【請求項6】
前記ロボットハンドは、
前記把持部が設置される基部と、
前記基部に設置される吸着ユニット基部と、を備え、
前記吸着ユニットは、前記吸着ユニット基部に着脱可能に装着される
請求項4に記載のピッキングシステム。
【請求項7】
前記吸着ユニット基部は、前記吸着ユニットと着脱可能に嵌合する着脱アクチュエータを有する
請求項6に記載のピッキングシステム。
【請求項8】
前記吸着ユニット基部は、前記吸着ユニットに設けた複数の前記吸着パッドと連通する接続部を有し、
前記着脱アクチュエータと前記接続部は、前記把持部における2つの前記指先部の開閉方向と直交する方向に並べて配置される
請求項7に記載のピッキングシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ピッキングシステムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
近年、所定の場所上流の工程から搬入された物品を搬送ロボットにより保持して、所定の場所まで搬出するピッキングシステムが知られている。また、搬出ロボットには、物品を把持するロボットハンドが設けられている。
【0003】
物品を把持するロボットハンドに関する技術としては、例えば、特許文献1に記載されているようなものがある。特許文献1には、着脱可能な接触部を有するロボットハンドであって、接触部の装着状態を変更することで、接触部の数およびまたは配置を変更することができる技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-80975号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された技術では、ロボットハンドの把持部によってのみ物品を把持し、搬送していた。そのため、特許文献1に記載された技術では、把持部を開いた状態よりも大きな物品や、物品の形状によっては安定した状態で把持することができず、搬送する際に、物品がロボットハンドからから抜け落ちるおそれがあった。
【0006】
本目的は、上記の問題点を考慮し、様々なサイズや形状の物品に対しても安定して搬送することができるピッキングシステムを提供することにある。
【課題を解決するための手段】
【0007】
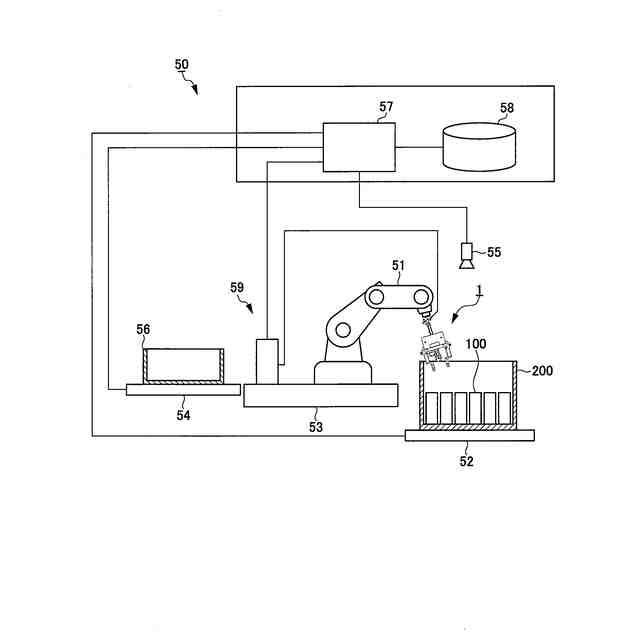
上記課題を解決し、目的を達成するため、ピッキングシステムは、物品を搬送する搬送ロボットと、搬送ロボットに設けられたロボットハンドと、ロボットハンドを制御する制御装置と、を備えている。ロボットハンドは、物品を把持する把持部と、物品を吸着する吸着パッドを複数有する吸着ユニットと、を備えている。制御装置は、把持部による把持と吸着ユニットによる吸着で物品を保持する第1搬送モードと、吸着ユニットによる吸着で物品を保持する第2搬送モードを有している。制御装置は、物品に応じて、第1搬送モードと第2搬送モードを切り替える。
【発明の効果】
【0008】
上記構成のピッキングシステムによれば、様々なサイズや形状の物品に対しても安定して搬送することができる。
【図面の簡単な説明】
【0009】
実施の形態例にかかるピッキングシステムを示す概略構成図である。
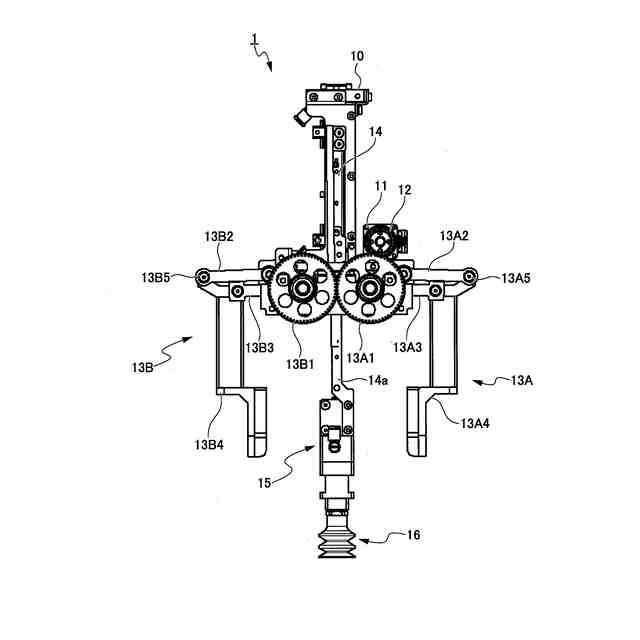
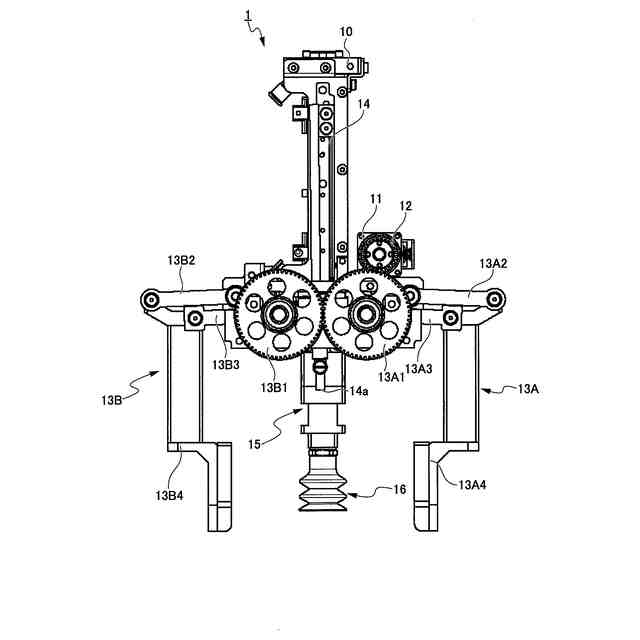
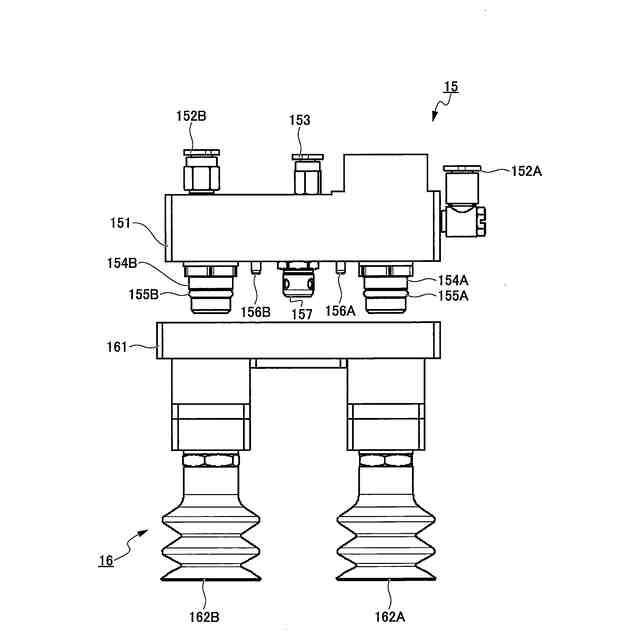
実施の形態例にかかるロボットハンドを示す斜視図である。
実施の形態例にかかるロボットハンドを示す斜視図である。
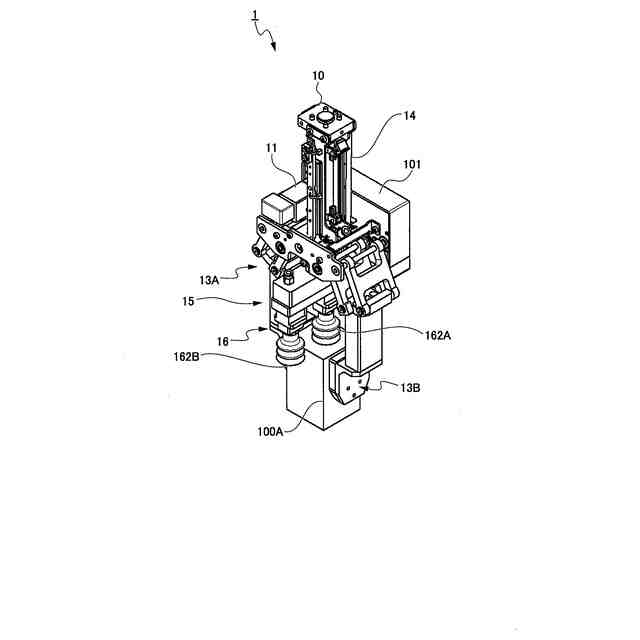
実施の形態例にかかるロボットハンドの伸縮機構が伸長した状態を示す正面図である。
実施の形態例にかかるロボットハンドの伸縮機構が収縮した状態を示す正面図である。
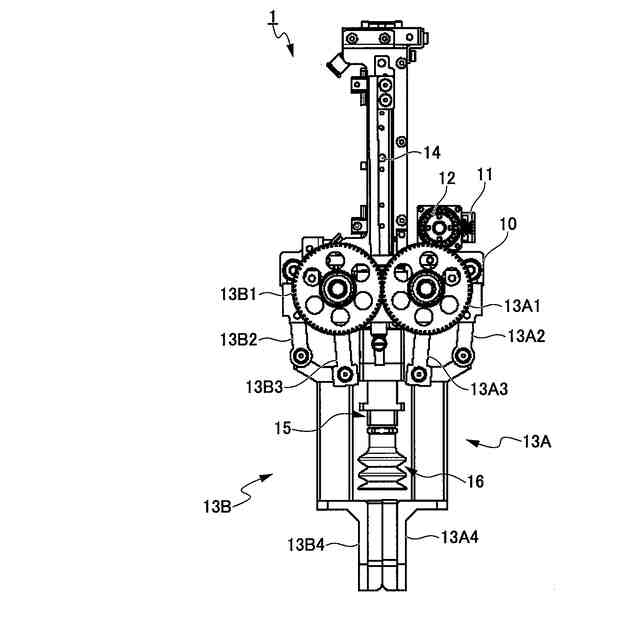
実施の形態例にかかるロボットハンドの把持部が開いた状態を示す正面図である。
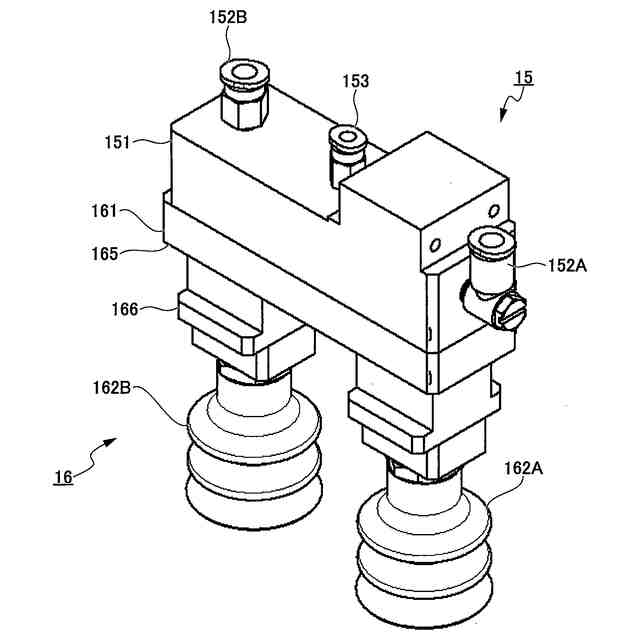
実施の形態例にかかるロボットハンドの吸着ユニット基部及び吸着ユニットを示す斜視図である。
実施の形態例にかかるロボットハンドの吸着ユニット基部及び吸着ユニットを示す正面図である。
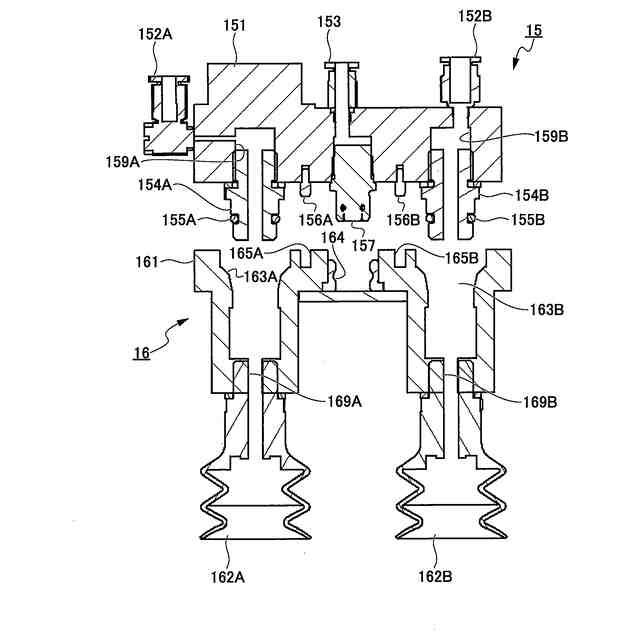
実施の形態例にかかるロボットハンドの吸着ユニット基部及び吸着ユニットを分離した状態を示す断面図である。
実施の形態例にかかるロボットハンドの吸着ユニット基部及び吸着ユニットを接続した状態を示す断面図である。
実施の形態例にかかるロボットハンドの他の吸着ユニットを示す斜視図である。
実施の形態例にかかるピッキングシステムの空圧制御ユニットを示す概略構成図である。
図13Aから図13Dは、実施の形態例にかかるピッキングシステムにおける第1搬送モードでのピッキング動作を示す説明図である。
図14Aから図15Cは、実施の形態例にかかるピッキングシステムにおける第1搬送モードでのピッキング動作を示す説明図である。
図15Aから図15Cは、実施の形態例にかかるピッキングシステムにおける第2搬送モードでのピッキング動作を示す説明図である。
実施の形態例にかかるピッキングシステムにおける第3搬送モードでのピッキング動作を示す説明図である。
実施の形態例にかかるピッキングシステムにおける他の吸着ユニットを用いて物品を搬送する例を示す説笑み図である。
実施の形態例にかかるピッキングシステムにおける他の搬送モードのピッキング動作を示す説明図である。
実施の形態例にかかるピッキングシステムにおける他の搬送モードのピッキング動作を示す説明図である。
吸着ユニットホルダを示す斜視図である。
吸着ニットホルダに保管された吸着ユニットを示す断面図である。
吸着ユニットの交換動作を示す図である。
吸着ユニットの交換動作を示す図である。
吸着ユニットの交換動作を示す図である。
【発明を実施するための形態】
【0010】
以下、ピッキングシステムの実施の形態例について、図1~図24Bを参照して説明する。なお、各図において共通の部材には、同一の符号を付している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
3か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
3か月前
個人
スロットルトリガー
3か月前
株式会社エビス
連結具
今日
中国電力株式会社
腰袋
6か月前
太陽工業株式会社
チャック装置
2か月前
コクヨ株式会社
補助器具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
衝撃工具
5か月前
日東工器株式会社
動力工具
3か月前
個人
メンテナンス用スタンド
4か月前
川崎重工業株式会社
ロボット
14日前
CKD株式会社
把持装置
3か月前
学校法人立命館
グリッパ
3か月前
株式会社マキタ
電動工具
7日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
7日前
東京計器株式会社
接触検知装置
4か月前
トヨタ自動車株式会社
ロボット
4か月前
株式会社マキタ
動力工具
6か月前
川崎重工業株式会社
罫書用治具
6か月前
オムロン株式会社
電動把持工具
3か月前
個人
回転工具およびバリ取り部品
4か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社ハーモ
開閉チャック装置
4か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
株式会社マキタ
電動ハンマ
1か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
制御装置
1か月前
トヨタ自動車株式会社
ハンド構造
5か月前
白山工業株式会社
ロボットアーム
3か月前
株式会社エビス
携帯付属物取付具
1か月前
株式会社ダイヘン
搬送装置
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































