TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024171394
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023088364
出願日
2023-05-30
発明の名称
遅延時間測定システム
出願人
株式会社光パスコミュニケーションズ
代理人
主分類
H04B
3/46 20150101AFI20241205BHJP(電気通信技術)
要約
【課題】遠隔地間の映像遅延測定の際に、ケーブル接続なしに映像送出側と受像側のタイミングを合わせる手段を提供する。
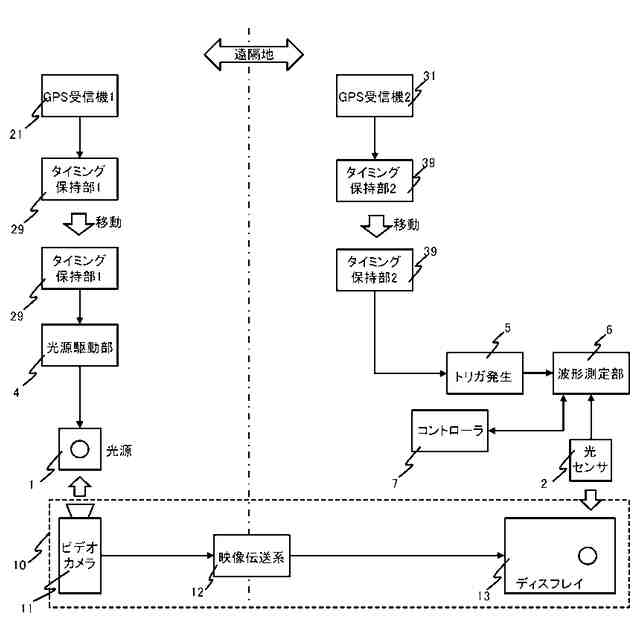
【解決手段】基準タイミング発生器の信号にタイミング保持部を同期させ、前記タイミング保持部をバッテリーで動作維持しつつ被測定物近傍に移動し、前記タイミング保持部の出力信号を用いて遅延時間測定を行い、前記タイミング保持部をバッテリーで動作維持しつつ前記基準タイミング発生器近傍に移動し、前記タイミング保持部と前記基準タイミング発生器を比較し時間誤差を計測する工程を実行する。
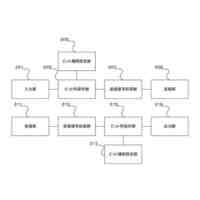
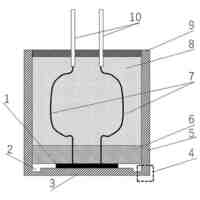
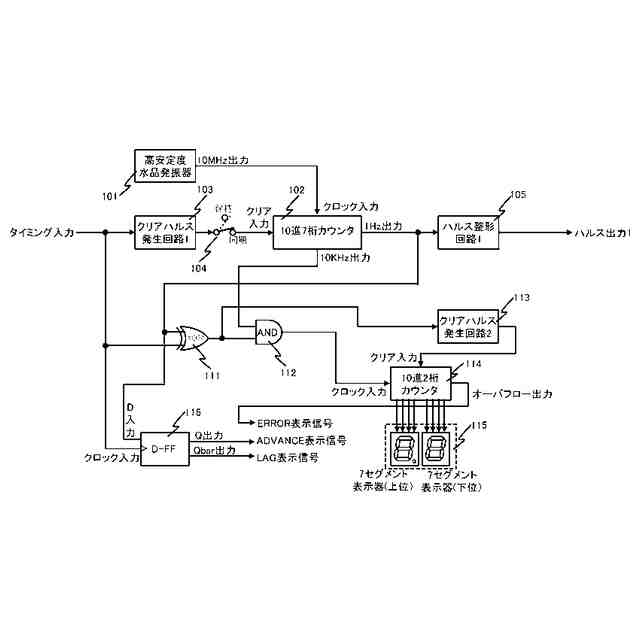
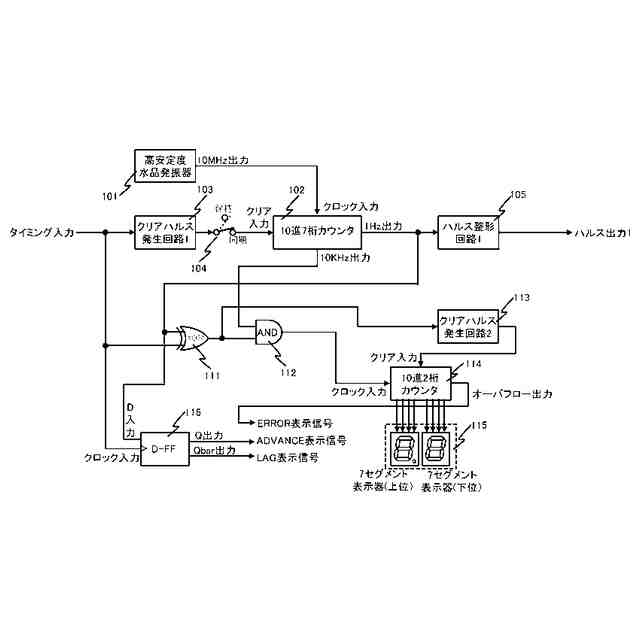
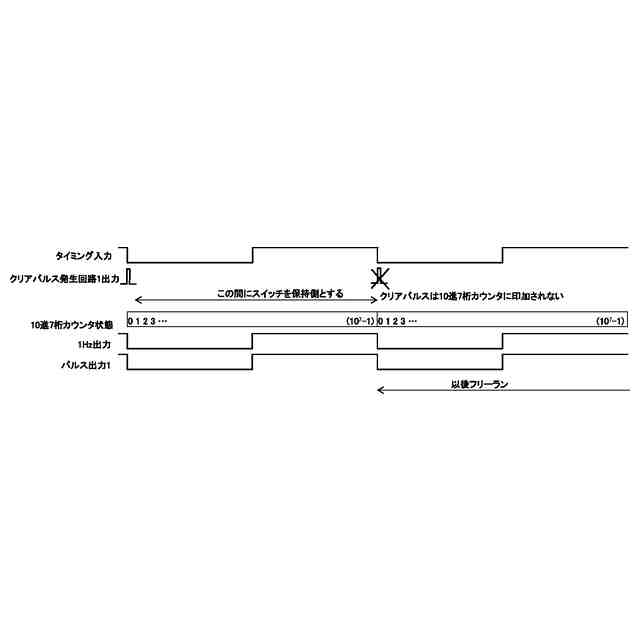
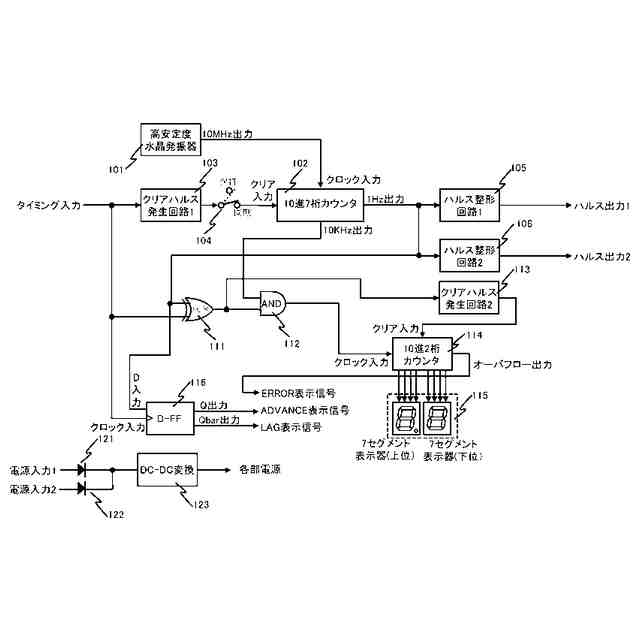
前記タイミング保持部は高周波数安定度発振器、分周回路、波形整形回路、クリアパルス発生回路、クリアパルス印加を切換えるスイッチ、前記分周回路出力と前記基準タイミング入力との時間差を出力する比較回路、前記比較回路の出力パルス幅の測定結果を表示する回路を設ける。
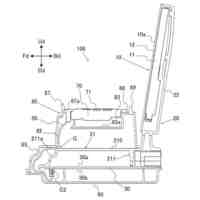
【選択図】図6
特許請求の範囲
【請求項1】
第一の地点に設置したアクチュエータを駆動電気信号でON/OFF駆動し、被測定システムでそれをセンシングして伝送したのち、前記被測定システムの第二の地点から出力される物理量を、センサで電気信号に変換し、前記駆動電気信号と前記センサからの電気信号の変化に関する時間差を測定する装置において、
前記駆動電気信号の変化のタイミングと、前記センサからの電気信号の変化のタイミングの、いずれか少なくとも一方のタイミングを決定するタイミング保持部に関して、
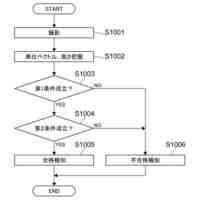
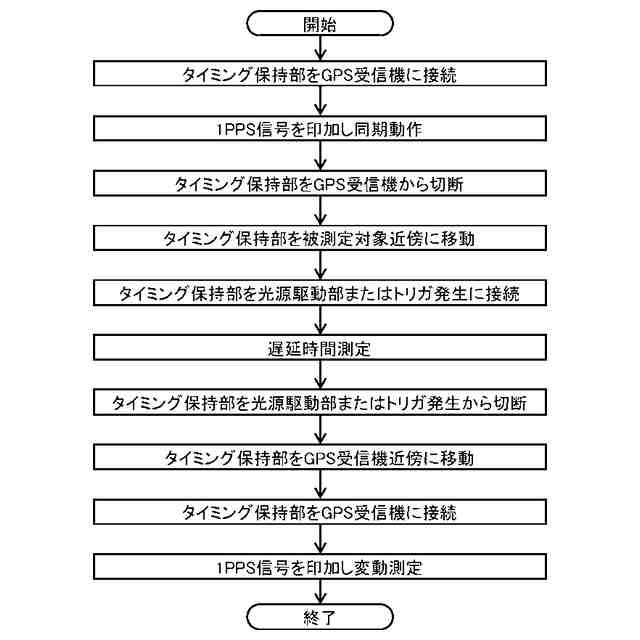
基準タイミング発生器からの信号にタイミング保持部を同期させる工程と、
前記タイミング保持部をバッテリーで動作維持しながら被測定物近傍に移動する工程と、
前記タイミング保持部の出力信号を用いて時間差測定を行う工程と、
前記タイミング保持部をバッテリーで動作維持しながら前記基準タイミング発生器近傍に移動する工程と、
前記タイミング保持部と前記基準タイミング発生器の出力信号を比較して、前記タイミング保持部の時間的誤差を計測する工程とを順次実行する遅延時間測定手順において、前記タイミング保持部は、
高周波数安定度発振器と、
前記高安定度水晶発振器の出力を分周する分周回路と、
前記分周回路の出力をタイミング保持部の出力として出力する波形整形回路と、
入力タイミング信号からクリア信号を生成するクリアパルス発生回路と、
前記クリア信号を前記分周回路に印加するか否かを切り換えるスイッチと、
前記分周回路の出力と前記タイミング入力との時間差のパルスを出力する比較回路と、
前記比較回路の出力パルス幅をクロックパルスで計数し表示する回路、もしくはあらかじめ設定した閾値を超えたことを表示する回路のいずれか少なくとも一方と、
を有することを特長とした遅延時間測定システム.
続きを表示(約 640 文字)
【請求項2】
前記入力タイミング信号の変化と前記分周回路の出力の変化の進み遅れを判別する進み遅れ判別回路を有することを特長とした請求項1に記載の遅延時間測定システム.
【請求項3】
前記基準タイミング発生器は衛星測位システムからの時刻信号を出力する受信機であることを特長とした請求項1に記載の遅延時間測定システム.
【請求項4】
前記基準タイミング発生器は、別の基準タイミング発生器に同期することなしにフリーランする第二のタイミング保持部であることを特長とした請求項1に記載の遅延時間測定システム.
【請求項5】
前記被測定システムは、ビデオカメラ、映像伝送部、ディスプレイからなるものとし、前記アクチュエータは光源、前記センサは光センサであることを特長とした請求項1に記載の遅延時間測定システム.
【請求項6】
前記被測定システムは、第一のマイクロフォン、音声信号伝送部、第一のスピーカからなるものとし、前記アクチュエータは第二のスピーカ、前記センサは第二のマイクロフォンであることを特長とした請求項1に記載の遅延時間測定システム.
【請求項7】
前記被測定システムは、第一の振動センサ、振動信号伝送部、第一の振動アクチュエータからなるものとし、前記アクチュエータは第二の振動アクチュエータ、前記センサは第二の振動センサであることを特長とした請求項1に記載の遅延時間測定システム.
発明の詳細な説明
【技術分野】
【0001】
本発明は、映像などの撮像・伝送・表示を行う被測定対象における一連の動作を行う際の所要時間の測定を、GPS(Global Positioning System)などの衛星測位システムを用いて遠隔地間で正確に行う遅延時間測定システムに関する。測定対象は映像だけにとどまらず音声やハプティクスも対象とする。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
映像遅延時間を測定する方法は多数の例があり、タイムスタンプを挿入する方法、時計を撮像・表示する方法、IP(Internet Protocol)ネットワークのプロトコルの一つであるICMP(Internet Control Message Protocol)を使用した往復時間を測定する方法などがある。
【0003】
タイムスタンプを使用する方法は、映像送出側で正確な時刻を付した情報を映像信号と一緒に送出し、被測定システムを介して伝送した後、受像側でそれを解析するものである。例えば特許文献1にその詳細が述べられている。しかし、この方法では被測定システムに含まれるビデオカメラやディスプレイの内部で生じる遅延時間を測ることができず、システムの一部分の遅延時間しか測定できない。また、本来の映像信号に加え、タイムスタンプを付した信号を映像送出側で挿入し、受像側で抜き出す必要があり、測定システムが複雑になる。
【0004】
時計を撮像・表示する方法は、例えば特許文献2に述べられていて、被測定システムのビデオカメラで時計の映像を撮像し、伝送後に被測定システムのディスプレイに表示された映像についてその時点での時計の映像と比較して遅延時間を算出するものである。このシステムではビデオカメラやディスプレイを含む遅延時間を測定することが可能ではあるが、時計表示の変化を正確に捉えられないため精度が悪い点に課題がある。
【0005】
IPネットワークのプロトコルの一つであるICMPによる測定、すなわち、いわゆるpingコマンドによる遅延時間測定は、文献をあげるまでもなく広く一般的に行われるものである。しかしながらこれは往復遅延時間を対象としていて、測定対象はIPネットワークで伝送する場合に限られる。また、ビデオカメラやディスプレイを含む遅延時間を測定することができない。
【0006】
別の方法として非特許文献1に示されるようなものがある。これは測定装置が点滅させる光源を、被測定システムのビデオカメラで撮像・伝送した後、ディスプレイで表示される点滅映像を光センサで電気信号に変え、その応答から遅延時間を測定する方法である。
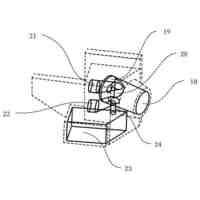
【0007】
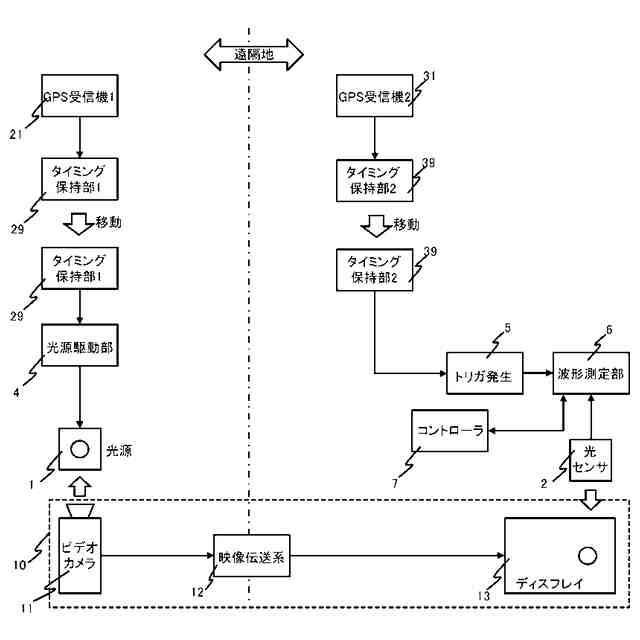
図1に構成図を示す。図1において1は光源であり例えば発光ダイオードLED(Light Emitting Diode)を、2は光センサであり例えばフォトダイオードPD(Photo Diode)を用いる。3は基準信号発生器でコントローラ7の制御の元で所定の矩形波を出力する。4は光源駆動部で、基準信号発生器3の信号から光源1を駆動する信号を発生する。5はトリガ信号発生で基準信号発生器3の信号を入力し、6の波形測定部に印加する信号を発生する。光源駆動部4とトリガ発生5の信号変化のタイミングは同一である。波形測定部6は、光センサ2~の信号とトリガ発生5からの信号の波形を測定する。波形測定部6で取得した波形はコントローラ7に送られ、解析し遅延時間を算出する。コントローラ7は例えばパーソナルコンピュータであり遅延時間算出結果をそのディスプレイ部に表示する。10は被測定システムであり、ビデオカメラ11、映像伝送系12、ディスプレイ13を含む。
【0008】
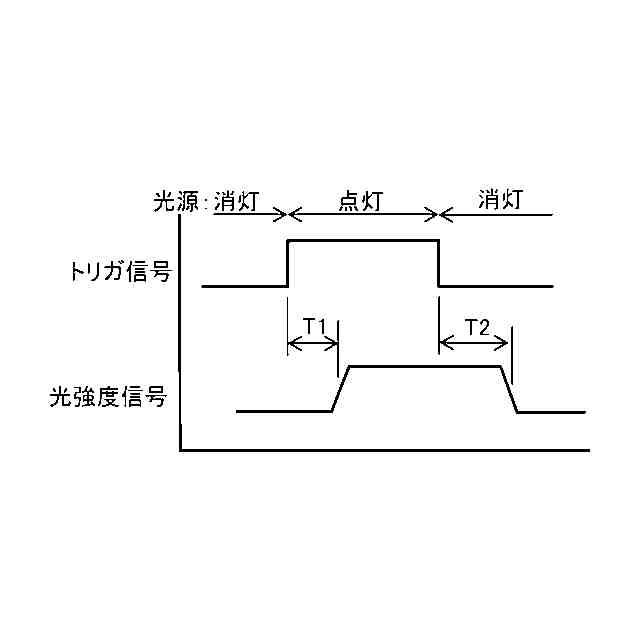
この動作を図2のタイムチャートに示す。光源駆動信号すなわちトリガ信号がローレベルの時には光源1は消灯し、ハイレベルの時には光源は点灯する。光源を撮像した被測定システム10のビデオカメラ11の出力は映像伝送系12を介してディスプレイ13に表示される。この動作の遅延時間は図2に示すように光センサ2から出力される光強度信号の遅れとなり、光源1が消灯から点灯時はT1で示した時間、点灯から消灯の時はT2で示した時間というように、コントローラ7にて解析して遅延時間の測定を行うことができる。
【0009】
図1の構成は、タイムスタンプを使わないため被測定系の映像信号には手を加えず、またビデオカメラからディスプレイまでのすべての遅延を測定することができる。さらに、光源のオンオフの2値を用いていてシンプルに遅延時間を算出することができる。ICMPプロトコルと異なり、IPネットワークを使った伝送に限定されることなく任意の映像伝送系での片道遅延を評価しすることができる。
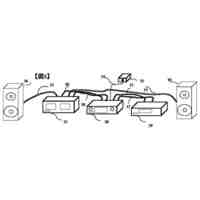
【0010】
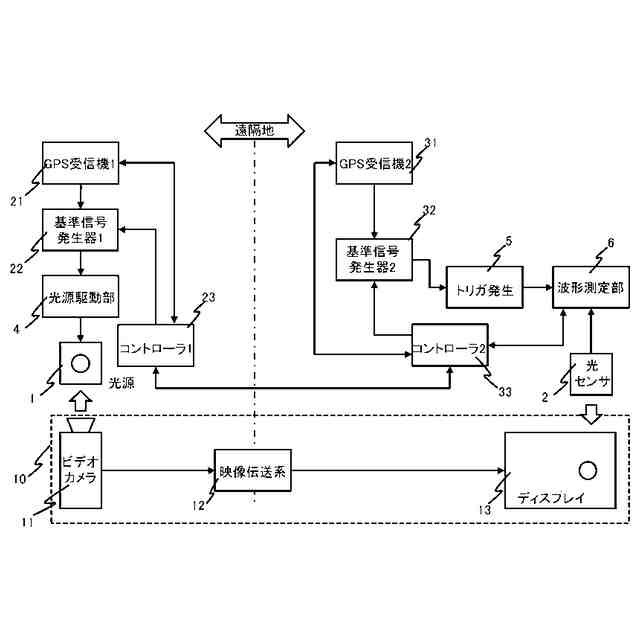
図1の遅延時間測定システムは被測定システム10のビデオカメラ11とディスプレイ13が近距離にあり、測定のための信号をケーブルにて適宜接続できるような距離を前提としていた。ところが被測定システム10のビデオカメラ11とディスプレイ13が遠隔地に設置され、その間の遅延時間を測定したい場合は、図3に示すようにGPSを用いて時刻同期をとることが一般に行われる。なお、GPSだけでなく他の衛星測位システムをも含むGNSS(Global Navigation Satellite System)の利用も可能であり、本明細書で述べるGPSとは衛星測位システムの総称である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
挿耳装置
1か月前
個人
仮想アース
1か月前
個人
環境音制御方法
22日前
個人
車両の制御装置
2か月前
日本無線株式会社
秘匿通信
22日前
日本精機株式会社
表示装置
22日前
個人
押しボタン式側圧調整器
29日前
個人
投げ銭管理システム
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
撮像装置
2か月前
太陽誘電株式会社
超音波装置
2か月前
17LIVE株式会社
サーバ
1か月前
キヤノン電子株式会社
画像読取装置
1か月前
個人
平面映像の回転による立体映像
2か月前
キヤノン電子株式会社
画像読取装置
8日前
キヤノン電子株式会社
シート搬送装置
1か月前
ブラザー工業株式会社
印刷装置
2か月前
個人
テレビ画面の立体画像の表示方法
22日前
株式会社ベアリッジ
携帯無線機
8日前
キヤノン株式会社
画像読取装置
2か月前
ブラザー工業株式会社
読取装置
1か月前
キヤノン株式会社
無線通信装置
1か月前
株式会社クボタ
作業車両
1か月前
シャープ株式会社
表示装置
1か月前
ブラザー工業株式会社
利用管理システム
1か月前
シャープ株式会社
表示装置
1日前
日本セラミック株式会社
超音波送受信器
29日前
株式会社ACSL
確認方法
1か月前
リオン株式会社
マイクロホン
29日前
キヤノン株式会社
画像形成システム
1日前
アイホン株式会社
インターホン機器
2か月前
株式会社ミチヒロ
SoTモジュール
22日前
スズキ株式会社
車両用撮影システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ