TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024167633
公報種別
公開特許公報(A)
公開日
2024-12-04
出願番号
2023083843
出願日
2023-05-22
発明の名称
移動制御装置及び移動制御システム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20241127BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】物体の現在位置から目標位置までの移動経路の少なくとも一部を含む空間内の画像を用いて移動制御を行う際に、空間内の状態に応じた物体の移動経路を選択可能な移動制御装置及び移動制御システムを提供する。
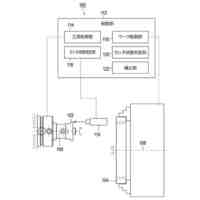
【解決手段】移動制御装置は、ビジュアルフィードバック制御のための物体の第一移動経路を決定し、第一移動経路を示す第一経路情報を生成する第一生成処理と、画像情報又は該画像情報から生成される特徴量セットを用いて、機械学習に基づくモデルベース制御のための物体の第二移動経路を決定し、第二移動経路を示す第二経路情報を生成する第二生成処理と、第一経路情報及び第二経路情報のうちのいずれか一方の経路情報を選択し、いずれか一方の経路情報により特定される移動経路に沿って物体を目標位置まで移動させるように、制御対象物に対する移動制御を行う移動制御処理と、を実行する。
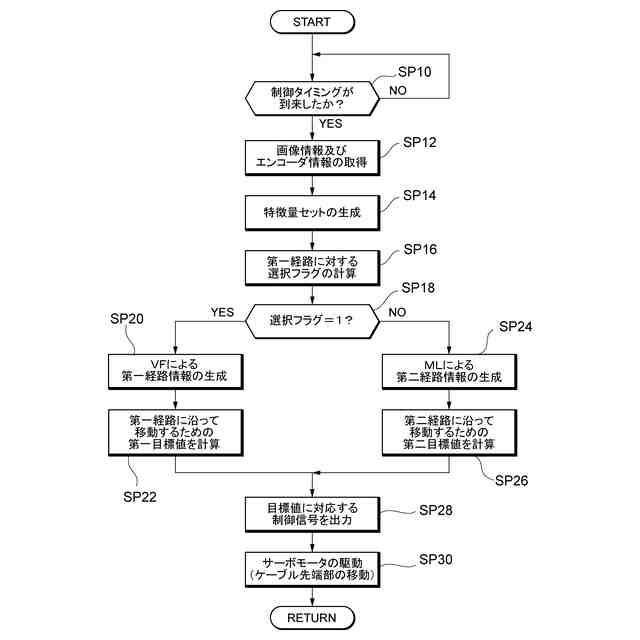
【選択図】図5
特許請求の範囲
【請求項1】
一つ以上のプロセッサを有し、
前記一つ以上のプロセッサは、
物体の現在位置から目標位置までの移動経路の少なくとも一部を含む空間内を撮影して得られる、前記空間内の画像に関する画像情報を用いて、ビジュアルフィードバック制御のための前記物体の第一移動経路を決定し、前記第一移動経路を示す第一経路情報を生成する第一生成処理と、
前記画像情報又は該画像情報から生成される特徴量セットを用いて、機械学習に基づくモデルベース制御のための前記物体の第二移動経路を決定し、前記第二移動経路を示す第二経路情報を生成する第二生成処理と、
前記第一経路情報及び前記第二経路情報のうちのいずれか一方の経路情報を選択し、前記いずれか一方の経路情報により特定される移動経路に沿って前記物体を前記目標位置まで移動させるように、前記物体と同一の又は異なる制御対象物に対する移動制御を行う移動制御処理と、
を実行することを特徴とする移動制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記第二生成処理は、機械学習がなされた探索学習器を用いた回帰演算を含み、
前記探索学習器は、前記空間内の状態を示す状態特徴量、前記制御対象物に関するエンコーダ情報、又は評価対象の移動経路を示す経路特徴量を入力し、前記評価対象の移動経路に対する評価結果を示す探索評価値を出力することを特徴とする請求項1に記載の移動制御装置。
【請求項3】
前記一つ以上のプロセッサは、前記第一経路情報又は前記第二経路情報の選択に関する判定処理をさらに実行し、
前記第一生成処理及び前記第二生成処理は、前記判定処理による判定結果に応じて択一的に実行されることを特徴とする請求項2に記載の移動制御装置。
【請求項4】
前記判定処理は、機械学習がなされた評価学習器を用いた回帰演算を含み、
前記評価学習器は、前記空間内の状態を示す状態特徴量又は前記制御対象物に関するエンコーダ情報を入力し、前記第一経路情報又は前記第二経路情報の採否を示す選択フラグを出力することを特徴とする請求項3に記載の移動制御装置。
【請求項5】
前記評価学習器は、前記探索評価値を報酬とする強化学習がなされた学習器であることを特徴とする請求項4に記載の移動制御装置。
【請求項6】
前記判定処理は、機械学習がなされた評価学習器を用いた回帰演算を含み、
前記評価学習器は、前記空間内の状態を示す状態特徴量又は前記制御対象物に関するエンコーダ情報を入力し、前記探索評価値と同一の又は相関する評価値を出力することを特徴とする請求項3に記載の移動制御装置。
【請求項7】
前記移動制御処理では、前記第一移動経路に対応する前記評価値が閾値を上回る場合に前記第一経路情報を選択し、前記評価値が閾値以下である場合に前記第二経路情報を選択することを特徴とする請求項6に記載の移動制御装置。
【請求項8】
制御対象物と、
前記制御対象物に対する移動制御を行う移動制御装置と、
前記制御対象物と同一の又は異なる物体の現在位置から目標位置までの移動経路の少なくとも一部を含む空間内を撮影し、前記空間内の画像に関する画像情報を出力する視覚センサと、を備え、
前記移動制御装置は、
前記視覚センサから出力された前記画像情報を用いて、ビジュアルフィードバック制御のための前記物体の第一移動経路を決定し、前記第一移動経路を示す第一経路情報を生成する第一生成処理と、
前記画像情報又は該画像情報から生成される特徴量セットを用いて、機械学習に基づくモデルベース制御のための前記物体の第二移動経路を決定し、前記第二移動経路を示す第二経路情報を生成する第二生成処理と、
前記第一経路情報及び前記第二経路情報のうちのいずれか一方の経路情報を選択し、前記いずれか一方の経路情報により特定される移動経路に沿って前記物体を前記目標位置まで移動させるように前記移動制御を行う移動制御処理と、
を実行することを特徴とする移動制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御対象物に対して移動制御を行う移動制御装置及び移動制御システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
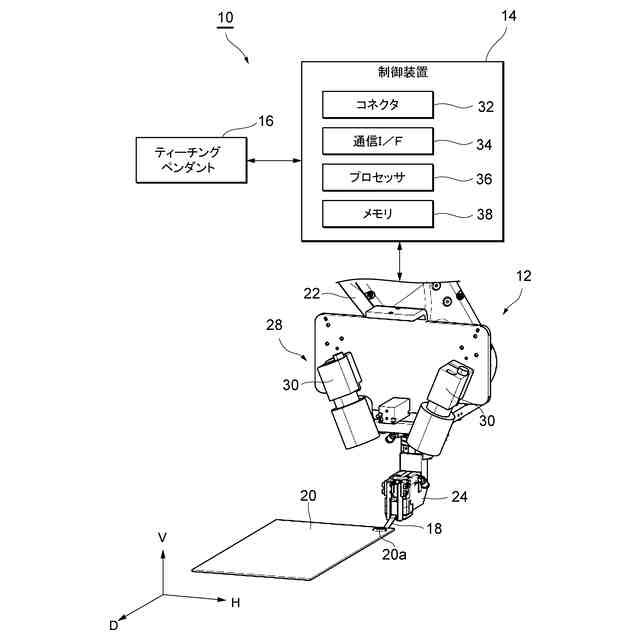
従来から、物体を目標位置まで移動させるための様々な制御方法が知られている。例えば、産業機械分野において、ロボットを用いてワークに対して作業を行う作業方法が開示されている。尚、物体の目標位置まで移動は、制御対象物を用いるケースと、物体自体が制御対象物であるケースとが挙げられる。
【0003】
特許文献1には、複数のワークの中から作業対象を選定してロボットによる作業を行う場合のサイクルタイムを低減するための制御システムが開示されている。具体的には、特許文献1には、ロボットのツール近傍に設置された視覚センサを用いて、ビジュアルフィードバック制御により作業対象のズレ量を補正する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-024027号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
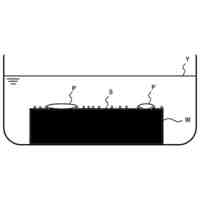
特許文献1で開示されるシステムのように、物体の現在位置から目標位置までの移動経路の少なくとも一部を含む空間内の画像を用いて移動制御を行っている間に、何らかの理由で空間内に障害物が出現する状況があり得る。例えば、ビジュアルフィードバック制御が用いられる場合、障害物によるオクルージョンの発生状況によっては、実際には目標位置までの移動経路があるにもかかわらず、空間内の状態に適した移動経路を探索できない可能性がある。
【0006】
本発明はこのような問題に鑑みてなされたものであり、その目的は、物体の現在位置から目標位置までの移動経路の少なくとも一部を含む空間内の画像を用いて移動制御を行う際に、空間内の状態に応じた物体の移動経路を選択可能な移動制御装置及び移動制御システムを提供することにある。
【課題を解決するための手段】
【0007】
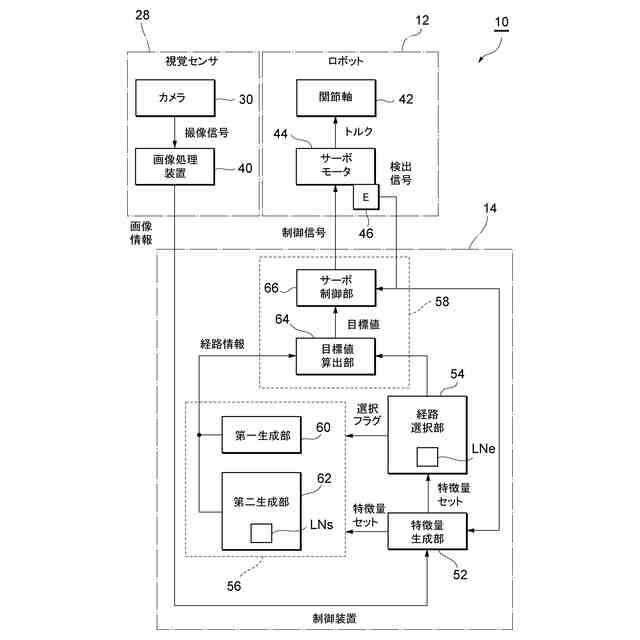
本発明の第一態様における移動制御装置は、一つ以上のプロセッサを有し、前記一つ以上のプロセッサは、物体の現在位置から目標位置までの移動経路の少なくとも一部を含む空間内を撮影して得られる、前記空間内の画像に関する画像情報を用いて、ビジュアルフィードバック制御のための前記物体の第一移動経路を決定し、前記第一移動経路を示す第一経路情報を生成する第一生成処理と、前記画像情報又は該画像情報から生成される特徴量セットを用いて、機械学習に基づくモデルベース制御のための前記物体の第二移動経路を決定し、前記第二移動経路を示す第二経路情報を生成する第二生成処理と、前記第一経路情報及び前記第二経路情報のうちのいずれか一方の経路情報を選択し、前記いずれか一方の経路情報により特定される移動経路に沿って前記物体を前記目標位置まで移動させるように、前記物体と同一の又は異なる制御対象物に対する移動制御を行う移動制御処理と、を実行する。
【0008】
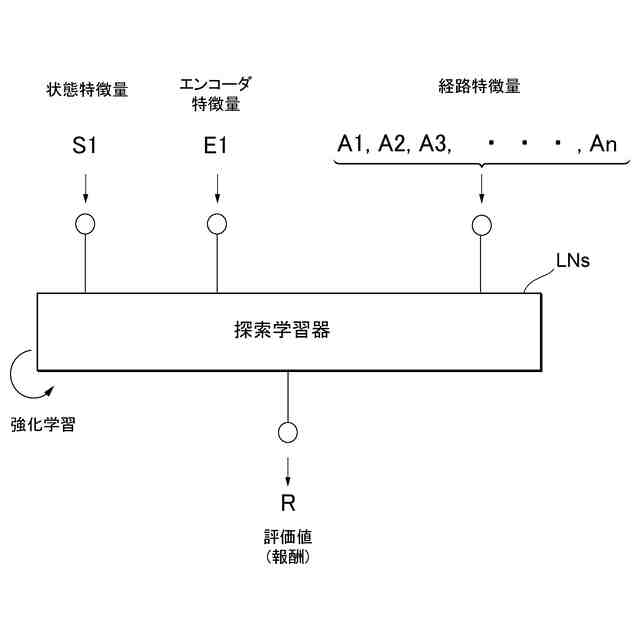
本発明の第二態様における移動制御装置では、前記第二生成処理は、機械学習がなされた探索学習器を用いた回帰演算を含み、前記探索学習器は、前記空間内の状態を示す状態特徴量、前記制御対象物に関するエンコーダ情報、又は前記評価対象の移動経路を示す経路特徴量を入力し、前記評価対象の移動経路に対する評価結果を示す探索評価値を出力する。
【0009】
本発明の第三態様における移動制御装置では、前記一つ以上のプロセッサは、前記第一経路情報又は前記第二経路情報の選択に関する判定処理をさらに実行し、前記移動制御処理では、前記判定処理による判定結果に応じて前記第一経路情報又は前記第二経路情報のいずれかを選択する。
【0010】
本発明の第四態様における移動制御装置では、前記判定処理は、機械学習がなされた評価学習器を用いた回帰演算を含み、前記評価学習器は、前記空間内の状態を示す状態特徴量又は前記制御対象物に関するエンコーダ情報を入力し、前記第一経路情報又は前記第二経路情報の採否を示す選択フラグを出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
塗布装置
1か月前
株式会社不二越
加熱装置
1か月前
株式会社不二越
電磁比例弁
1か月前
株式会社不二越
歯車加工機
1か月前
株式会社不二越
NC転造盤
1か月前
株式会社不二越
油圧ユニット
1か月前
株式会社不二越
X線測定装置
1か月前
株式会社不二越
工具の製造方法
10日前
株式会社不二越
液圧駆動システム
2日前
株式会社不二越
超硬合金製ドリル
2日前
株式会社不二越
X線回折測定装置
1か月前
株式会社不二越
スカイビングカッタ
1か月前
株式会社不二越
ロボットの操作装置
1か月前
株式会社不二越
熱処理に用いる油切り装置
1か月前
株式会社不二越
ワーク把持装置及びロボットシステム
1か月前
株式会社不二越
状態判定装置及び状態判定プログラム
1か月前
個人
木製ハンマー
5か月前
個人
関節モジュール
4か月前
個人
寸切りボルト回し
4か月前
個人
スロットルトリガー
4か月前
株式会社エビス
連結具
1か月前
中国電力株式会社
腰袋
8か月前
太陽工業株式会社
チャック装置
4か月前
コクヨ株式会社
補助器具
4か月前
日東工器株式会社
衝撃工具
6か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
川崎重工業株式会社
ロボット
1か月前
個人
メンテナンス用スタンド
6か月前
株式会社マキタ
打撃工具
2か月前
CKD株式会社
把持装置
4か月前
東京計器株式会社
接触検知装置
5か月前
オムロン株式会社
電動把持工具
4か月前
株式会社マキタ
動力工具
7か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ